

Вопросы к экзамену но ЛЭ курс 5-й 9 семестр 2012
Параметры траектории полета, представленные на EFIS
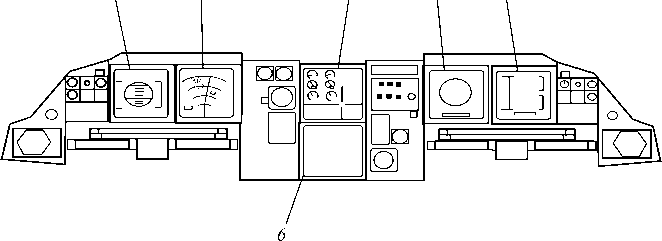
Высокоавтоматизированные самолеты оборудованы системой электронных пилотажных приборов (EFIS), которая разработана, чтобы обеспечить экипаж информацией о параметрах траектории полета.Типичная система EFIS автоматизированного самолета включает два командно-пилотажных индикатора (PFD), два навигационных дисплея (ND) и два пульта управления (control panels) EFIS. Каждый из набора этих трех устройств установлен в кабине самолета для каждого пилота вместе с другим дополнительным электронным оборудованием.
Рис.
3.10. Типовая кабина современного
автоматизированного самолета:
1
— основной пилотажный индикатор
командира; 2
— навигационный дисплей командира; 3
— дисплей основных параметров двигателя
и системы предупреждения экипажа;
4
— основной пилотажный индикатор второго
пилота; 5 — навигационный дисплей
второго пилота; 6
— дисплей вспомогательных параметров
двигателя и системы предупреждения
экипажа
Навигационный дисплей (ND)
Навигационный дисплей (navigation display — ND). Это устройство, которое предоставляет экипажу информацию о развитии полета самолета в горизонтальной плоскости. В кабине есть два идентичных ND, по одному для каждого пилота. Режимы функционирования навигационных дисплеев включают следующие четыре режима: «Заход на посадку», «VOR», «План» и «Карта».
Режим «Заход на посадку» (Approach Mode) показывает на ND информацию посадочной системы: курс, глиссаду и др., которая может быть полезной во время захода на посадку с индикацией или без нее параметров FD. В этом режиме представлены данные ILS, курс и расстояние по измерителю дальности (DME)
Режим «VOR» используется, когда экипаж должен следовать по определенному лучу VOR (угол между магнитным северным меридианом места станции и данным направлением от станции VOR). Этот режим может использоваться во время полета по маршруту или во время захода на посадку по так называемой «неточной» системе (рис. 5.17, 5.18). В режиме VOR вводится информация о ПМ, курсах, DME, расстояниях «на» и «от».
Режим «План» (Plan Mode) используется для ввода необходимых команд при полете по маршруту во время предполетной подготовки или когда маршрут изменяется в полете.
Режим «Карта» (Map Mode) показывает положение самолета относительно маршрута полета в пределах индикатора ND. Во время полета изображение маршрута, показанное на дисплее, перемещается сверху вниз. Информация на ND в режиме «Карта» включает: заданный и текущий трек, заданный и текущий курс, расстояние до заданной высоты, масштаб карты, вынесенной на дисплей, путевую скорость, истинную воздушную скорость полета, направление и скорость ветра, расстояние до следующего ППМ, расчетное время прибытия в очередной ППМ и данные о выбранных навигационных пунктах
Расширенные возможности режима «Карта»
информацию о земной поверхности над которой пролетает самолет с изображением высот ландшафта
информацию об опасных погодных явлениях
представить символы, изображающие другие самолеты в окружающем пространстве с информацией об их относительном расположении по отношению ВС.
Первичный полетный индикатор (PFD)
Командно-пилотажный индикатор (primary flight display — PFD).
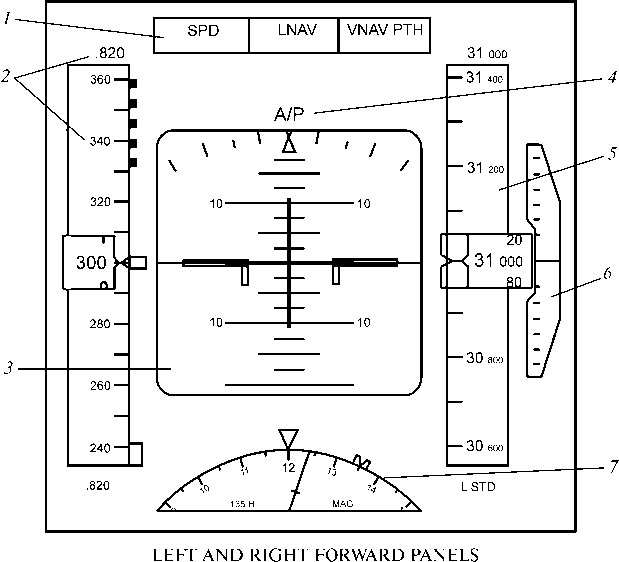
На нем предоставлены самые важные параметры траектории полета. Два одинаковых PFD установлены в кабине на левой и правой приборных панелях
Каждый PFD представляет все параметры, необходимые для управления траекторией полета. ЭТО: скорость полета, вертикальная скорость, барометрическая высота, радиовысота, пространственное положение, срочные предупреждения и сообщения, индикация станций ILS, индикация курса самолета, маршрута полета, минимумы захода на посадку и индикация радиомаркеров.
Рис.
5.1. Индикация параметров на РРБ самолета
Б777 [18]:
1
— указатель режимов полета; 2
— указатель скоростей самолета; 3
— указатель пространственного положения;
4
— указатель режима автопилота и статуса
системы управления полетом; 5 —
указатель высоты полета; 6
— индикация вертикальной скорости;
7 — информация о курсе и направлении
полета
Электронная система предупреждения экипажа. Изображение ландшафта на GPWS
В наши дни существуют три наиболее актуальные проблемы, связанные с безопасностью полетов: 1) столкновение самолетов в исправном состоянии с поверхностью земли (так называемая проблема СРГГ); 2) потеря пилотами возможности управлять самолетом в полете, прежде всего, в результате сильной турбулентности;
столкновение других самолетов в воздушном пространстве.
Современные самолеты оборудованы электронными системами, которые сообщают членам экипажа о потенциальной опасности и дают представление о том, что надо делать, чтобы избежать опасного развития аварийной или сложной ситуаций. Система предупреждения о приближении к земле (СППЗ — GPWS) предоставляет экипажу информацию о потенциально опасных условиях полета, которые угрожают столкновением с землей. Изображение ландшафта на GPWS. Изображение ландшафта на дисплее дает полную информацию экипажу об особенностях земной поверхности вокруг и перед самолетом во время полета. Функционирование этой системы основано на применении информации, содержавшейся в базе данных бортового компьютера (FMC) для всех аэропортов с длинами ВПП 3500 футов или более и охватывает 95 % поверхности земного шара. Районы вокруг аэропортов представлены в этой базе данными с высокой разрешающей способностью, а области между аэропортами представлены данными с более низким разрешением.
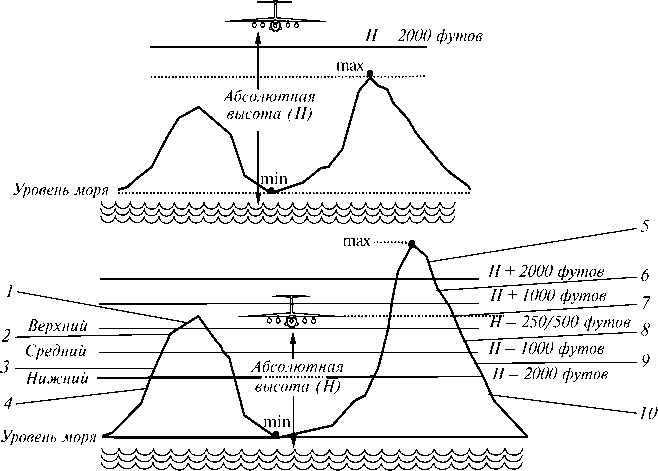
Цветовая кодировка высот в режиме обзора (при полете по маршруту):
1, 7 — желтый цвет; 2, 8 — темно-зеленый цвет; 3, 9 — зеленый цвет; 4, 10 — салатный цвет; 5 — красный цвет; 6 — темно-желтый цвет
Маневр, необходимый для предотвращения столкновения с землей.
Маневр, необходимый для предотвращения столкновения с землей (terrain avoidance maneuver). Выполнение этого маневра может предоставить экипажу возможность спасти жизни людей и самолет. . Любое из следующих условий можно расценивать как потенциальную угрозу столкновения с земной поверхностью:
включение предупреждения «PULL UP»;
другие ситуации, приводящие к недопустимому приближению к земной поверхности;
Действия PF в такой ситуации следующие:
отключить автопилот;
отключить автомат тяги;
энергично установить двигателям максимальную тягу;
убрать крен и создать угол тангажа в 20°;
убрать интерцепторы;
если столкновение с землей продолжает угрожать, продолжить увеличение тангажа до максимально допустимого или, иначе, до того значения, при котором начнется вибрация штурвала;
не изменять положение шасси или закрылков, пока PF не будет уверен в том, что самолет достаточно удалился от земной поверхности и показания радиовысотомера подтвердят это;
когда обеспечен отход от земной поверхности, медленно уменьшить угол тангажа и увеличить скорость.
Одновременно PNF должен выполнить следующее:
увеличить тягу двигателей до максимального значения;
проверить, что все необходимые действия были выполнены, обращая внимание на любые упущения;
контролировать вертикальную скорость и пространственное положение самолета;
обращать особое внимание на любую тенденцию, ведущую к столкновению с землей.
Бортовая система предотвращения столкновения с землей (TCAS)(С другими ВС)
Система TCAS запрашивает приемоответчики систем опознавания других ВС, отслеживает их, анализируя ответы и прогнозирует траектории других самолетов и их местонахождение в настоящее время. Автономное и независимое от ОВД функционирование этой системы предоставляет консультативное сообщение по устранению конфликтной ситуации и управлению траекторией полета самолета, с учетом движения близких к самолету других ВС.
-1
РББ
голосовое сообщение;
вертикальное направление желательного движения на PFD;
вертикальное направление желательного движения на указателе вертикальной скорости
сообщение красного цвета «TRAFFIC» на ND.
RA требует, чтобы экипаж немедленно
изменил курс полета самолета и последовал за вертикальным направлением, показанным на PFD. Этот маневр необходим, чтобы избежать столкновения с другим самолетом.
Консультативное сообщение о воздушной обстановке (traffic advisory — ТА) является прогнозированием ситуации, при которой другой самолет войдет в конфликтное воздушное пространство в последующие 35—45 с. Назначение консультативного сообщения — помочь экипажу установить визуальный контакт с другим самолетом. В этом случае TCAS предоставляет экипажу звуковое сообщение «traffic, traffic» и сообщение желтого цвета TRAFFIC на ND. При получении такого консультативного сообщения экипаж должен усилить визуальное наблюдение за внекабинным пространством
Изображение ближней воздушной обстановки (proximate traffic display) не является ни RA-, ни ТА-сообщениями. Оно показывает, что другой самолет находится в пределах 6 миль в горизонтальной плоскости и в диапазоне 1200 футов в вертикальной плоскости. Передвижение других ВС показывается на ND в виде белого ромба Если другой самолет передает свои данные о высоте, то эта величина также отображается в сообщении, которое содержит информацию об относительной высоте другого самолета и его наборе или снижении в вертикальном направлении.
Другие изображения движения ВС — это изображение другого самолета, который находится в пределах изображения ND, но не является ни RA-, ни ТА-сообщениями, ни изображением ближней воздушной обстановки. Система TCAS генерирует символом белого ромба. Этот символ автоматически превращается в изображение символа ближней воздушной обстановки (proximate traffic display), когда расстояние между самолетами уменьшается до 6 миль. Если другой самолет выдает свои высотные характеристики, то данные о его относительной высоте и вертикальном движении также отображаются на ND
Управление траекторией полета автоматизированного самолета: ручное управление траекторией полета
Ручное управление дополняет автоматизированное управление самолетом во время полета. Оно осуществляется пилотом посредством воздействия на штурвал или сайдстик для управления тан- гажом и креном самолета, а также на педали руля направления для управления движением самолета по курсу. Автоматизированными самолетами вручную управляют посредством мощных механических или электрических механизмов, которыми управляют с помощью электроники. Электроника включена в систему управления самолета между пилотом и управляемыми аэродинамическими поверхностями самолета.
Эти механизмы создают большие силы, необходимые для преодоления существенного аэродинамического сопротивления, создаваемого аэродинамическими поверхностями в процессе полета.
Управляя автоматизированным самолетом вручную, пилот может использовать планки флаг-директора (FD) индикатора PFD. Эта индикация показывает пилоту, как необходимо отклонить органы управления полетом, чтобы поддержать необходимую траекторию полета. Этот метод управления называют полуавтоматическим, или директорным управлением. В этом случае роль пилота в поддержании траектории полета уменьшается до простых действий слежения, так как ему значительно помогает информация, поступающая из FMS, которая автоматически вычисляет параметры траектории.
Управление траекторией полета автоматизированного самолета: автоматическое управление
При автоматическом управлении транспортным самолетом отклонение аэродинамических поверхностей в полете осуществляется через мощные усиливающие устройства в соответствии с командами, которые генерируются системой автоматического управления, называемой автопилотом системы управления полетом — AFDS. Функционирование AFDS скоординировано с функционированием другой автоматической системы — автоматом тяги (autothrottle), которая управляет двигателями самолета. Этими системами, как и другими, управляет и координирует их совместную работу FMS
AFDS можно управлять одним из трех способов.
1)Пилот может управлять самолетом вручную, используя только директорные планки (fd).
2) Самолетом может управлять автоматически автопилот совместно со штурвальным управлением (control wheel steering — cws), при этом управление по штурвалу имеет приоритет.
3) Автопилот, задействованный в режиме «управления» («command»), может полностью управлять самолетом в полете. Компьютеры AFDS посылают сигналы к рулям высоты, поворота и элеронам, которые отклоняются с помощью гидравлических усилителей, а также посылают сигналы управления на FD. Этот метод позволяет использовать все возможности и преимущества автоматики самолета.
Режимы автоматизированного управления параметрами траектории полета: в горизонтальной плоскости
Горизонтальные режимы («Lateral modes) AFDS включают:
«Выдерживание курса» («Heading hold») — обозначается (HDG на самолетах корпорации «Аэробус»; HDG HOLD — на самолетах корпорации «Боинг»);это базовый горизонтальный режим AFDS. Он выдерживает курс самолета, если угол крена был меньше 5°, когда был включен этот режим. Если угол крена был больше 5o, AFDS первоначально выводит самолет из крена и затем выдерживает курс, который был в момент, когда угол крена уменьшился до 5°.
«Выбор курса» («Heading selection») — обозначается HDG SEL; ») позволяет пилоту задать и выдерживать выбранный курс на МСР.
«Горизонтальная навигация» («Lateral navigation») — обозначается (VOR/LOC на самолетах корпорации «Аэробус»; LNAV — на самолетах корпорации «Боинг»);позволяет для осуществления навигации соединить возможности FMS с AFDS. Этот режим обычно используется в большей части полета — от взлета и до начального этапа захода на посадку. Устройство FMS изменяет направление полета в соответствии с ранее введенным в FMS планом полета.В режиме VOR AFDS определяет траекторию на станцию VOR, заданную экипажем.
«Радиомаяк» («VOR/localizer» или «localizer») — обозначается (VOR/LOC на самолетах корпорации «Аэробус»; LOG — на самолетах корпорации «Боинг»). обеспечивает выход и выдерживание направления на курсовой маяк, который генерирует специальный радиосигнал с узкой радиодиаграммой. Этот способ обычно используется для выдерживания курса самолета во время захода на посадку по точным системам — от начального этапа захода до пробега после приземления. Команды, которые выполняются в горизонтальных режимах AFDS, появляются на PFD.
Режимы автоматизированного управления параметрами траектории полета: в вертикальной плоскости
Продольные режимы (Longitudinal modes) AFDS включают:
«Вертикальная скорость» («Vertical speed») — в летно-эксплуатационной документации обозначается V/S) является базовым режимом AFDS, который поддерживает величину вертикальной скорости, которую самолет имел в момент включения режима.
«Поддержание высоты» («Altitude hold») — обозначается ALT; ») выдерживает текущую высоту, если вертикальная скорость была нулевой, когда режим «Altitude hold» был включен.
«Достижение высоты» («Altitude capture») — обозначается ALT*, или ALT star на самолетах концерна «Аэробус»; ALT САР — на самолетах концерна «Боинг»; позволяет достигнуть высоту, установленную на МСР. Когда выбранная высота достигнута, этот режим изменяется на режим «Altitude hold».
«Изменение эшелона» («Flight level change») — обозначается LVL/CH — на самолетах концерна «Аэробус»; и FLCH — на самолетах концерна «Боинг»; позволяет экипажу изменять высоту полета, когда самолетом управляет AFDS или осуществляется режим ручного пилотирования. Этот режим работы используется в том случае, когда оптимальный, автоматически рассчитанный набор высоты самолета или его снижение в режиме «VNAV» невозможны или нежелательны.
«Профиль полета» («Profile») — обозначается PROF — на самолетах концерна «Аэробус» или вертикальная навигация (vertical navigation) — VNAV — на самолетах концерна «Боинг»; Режим «VNAV» объединяет систему управления полетом самолета (FMS) с AFDS и автоматом тяги. В этом режиме FMS управ ляет вертикальной навигацией самолета и тягой его двигателей оптимальным способом.
«Заданная функция» («Preset function») используется на самолетах концерна «Аэробус». Режим заданной функции («Preset function mode») используется на самолетах концерна «Аэробус». Он связан с вертикальным управлением траектории полета самолета. Этот режим позволяет предварительно выбрать последующую скорость или значение числа М, которые принимают новые значения, как только соблюдаются определенные условия. Эти условия включают изменение эшелона или использование режима «Altitude hold» и включение режима «Altitude capture».
Режимы автоматизированного управления параметрами траектории полета: общие режимы.
Общие режимы (common modes) используются AFDS, когда все параметры полета должны быть изменены в скоординированном режиме.
Режим взлета (Takeoff mode); использует и продольные, и горизонтальные режимы, он доступен с включенными FD или с одновременно включенными режимами FD и CWS.
Режимы захода — Land — на самолетах «Аэробус»; approach — на самолетах «Боинг»; AFDS захватывает и выдерживает полет по лучам курсового маяка и глиссады системы посадки по приборам ILS. Этот режим управляет самолетом до момента выравнивания и обеспечивает дальнейшее управление, чтобы самолет оставался на оси ВПП во время пробега после посадки. Он используется для осуществления заходов по точным инструментальным системам при полете в ручном режиме и при автоматическом управлении полетом.
Режим «Уход на второй круг» — Go-around. Режим ухода на второй круг (Go-around mode) обеспечивает продольное и боковое управление самолетом во время ухода на второй круг с автоматическим включением соответствующего режима тяги. Этот режим может быть включен нажатием, по крайней мере, одного из рычагов (кнопок) ТО/GA (go-lever) или автопилотом после включения режима «Go-around». Если в момент начала маневра ухода на второй круг FD и AFDS не были включены, пилот должен выполнить эту операцию вручную, а после того как начат процесс ухода на второй круг FD включаются и появляются на PFD, что обеспечивает пилоту удобство в управлении траекторией полета.
Эксплуатация автопилота и системы автомата тяги.
Эксплуатация автопилота и системы автомата тяги. Автопилот обеспечивает автоматическое управление траекторией полета самолета, а система автомата тяги автоматически управляет тягой двигателя самолета.
AFDS можно управлять одним из трех способов.
Пилот может управлять самолетом вручную, используя только директорные планки (FD). Директорные планки показывают необходимые действия по управлению полетом на PFD. В этом случае члены экипажа в состоянии вручную управлять траекторией полета самолета, перемещая органы управления таким образом, чтобы добиться перемещения FD в центр PFD. Самолет следует по траектории полета, вычисленной компьютерами AFDS по параметрам, установленным экипажем, либо по параметрам, полученным автоматически из других систем самолета и данных наземных средств навигации. Пилоты используют полуавтоматический режим выдерживания траектории полета, чтобы управлять самолетом, когда автоматический полет невозможен из-за отказов систем самолета или нехватки необходимого наземного оборудования. Полуавтоматическое управление также используется и в полете без отказов систем самолета в ситуациях, когда автоматическое управление или невозможно по техническим причинам, или нежелательно, например во время обучения пилотов посадке в ручном режиме, когда важно точное поддержание параметров полета на заключительном этапе снижения. Пилотам разрешают и даже рекомендуют время от времени управлять самолетом в ручном режиме, используя полуавтоматический режим пилотирования, чтобы поддержать необходимый уровень навыков. Выполнять полет в полуавтоматическом режиме полета пилотам помогают компьютеры, которые вычисляют траекторию полета. Большая часть их работы в поддержании траектории полета является сравнительно несложной задачей — удержание FD в центре PFD. Это дает экипажу возможность и время, чтобы оценить ситуацию полета в целом и принимать своевременные и правильные решения.
Самолетом может управлять автоматически автопилот совместно со штурвальным управлением (control wheel steering — CWS), при этом управление по штурвалу имеет приоритет. Это специальный режим работы автоматики самолета, при котором автопилот поддерживает то положение тангажа и величину крена, которые были в момент включения автопилота. Режим «autopilot CWS» позволяет экипажу вручную изменять тангаж и величину крена через органы управления самолетом, не отключая автопилот. Этот метод управления траекторией полета является промежуточным между полуавтоматическим режимом и полностью автоматическим управлением полетом. Его доступность на определенных типах самолетов («Боинг», «Аэрбас», «Туполев» и т. п.) предоставляет экипажу дополнительные возможности. Интенсивность его использования зависит от эксплуатационной политики авиакомпании.
Автопилот, задействованный в режиме «управления» («command»), может полностью управлять самолетом в полете. Параметры траектории полета, установленные экипажем, так же, как и вычисленные FMC, поддерживаются автоматически. В этом режиме могут использоваться одновременно один или более автопилотов. Число задействованных автопилотов зависит от принципов автоматизации самолета и до известной степени от решения экипажа. Компьютеры AFDS посылают сигналы к рулям высоты, поворота и элеронам, которые отклоняются с помощью гидравлических усилителей, а также посылают сигналы управления на FD. Этот метод позволяет использовать все возможности и преимущества автоматики самолета. Он значительно увеличивает точность выдерживания траектории полета, уменьшает рабочую нагрузку на экипаж. Повышение точности выдерживания параметров траектории дает возможность эксплуатировать самолеты в значительно более сложных погодных условиях. Рациональное использование всех способов применения автоматики позволило достичь более высокого уровня безопасности полетов и большей экономической эффективности эксплуатации самолетов.
Режимы эксплуатации автомата тяги
Системой автомата тяги также можно управлять в одном из нескольких режимов:
в режиме тяги («Thrust mode») автомат тяги обеспечивает мощность двигателей, которая необходима для поддержания вертикальной скорости самолета, вычисленной бортовым компьютером, когда AFDS работает в «Продольном режиме» («Longitudinal mode»);
в режиме требуемой тяги (Thrust reference mode) обеспечивается тяга в пределах установленных ограничений;
в режиме «Скорость» («Speed mode») AFDS поддерживает заданную скорость;
в режиме малого газа («Idle mode») обеспечивается работа двигателей, когда РУДы находятся в положении малого газа;
в ручном режиме («Hold mode») РУДы могут управляться вручную;
Интерфейс управления автоматизацией: система управления автопилотом
Система управления автопилотом. Пилоты могут управлять эксплуатацией AFDS, задавая параметры траектории органами управления, расположенными на MCP/FCU (см. рис. 3.8, 7.3), или вводя необходимые параметры полета через систему управления полетом.
Пульт управления режимами (МСР\ FCU) обеспечивает прямое управление функционированием AFDS. Реализации МСР или FCU на различных самолетах могут незначительно отличаться, но они, как правило, аналогичны на всех типах автоматизированных самолетов. Пульт МСР (или FCU) расположен в кабине на козырьке и имеет выключатели, кнопки и вращающиеся тумблеры для включения и задания режимов функционирования AFDS режимов работы автомата тяги и параметров траектории полета. Выбранные значения параметров траектории полета могут наблюдаться на МСР или FCU в специальных окошках (см. рис. 3.8, 7.3).
Автопилот может быть включен соответствующим выключателем на МСР или FCU. Когда он включен, это отображается на PFD (поз. 4 на рис. 5.1). Автопилот приводится в недействующее состояние нажатием кнопки выключения 1 на штурвалах пилотов (рис. 7.9). Еще один способ отключения автопилота предусматривает использование выключателя на МСР (см. рис. 7.8). Существуют и другие способы отключения автопилота.
Планки FD появляются на левом и правом PFD в том случае, когда соответствующий выключатель — МСР или FCU — находится в положении «ON». Во время полета, когда включен режим «Go-around», планки FD появляются, даже если выключатель находится в положении «OFF».
Интерфейс управления автоматизацией: управление функциями системы управления полетом (FMS)
Управление функциями системы управления полетом (FMS). Центральным устройством системы управления полетом является его FMC, обеспечивающий вычисления параметров полета и их оптимизацию в соответствии с критериями, которые ранее были запрограммированы или затем изменены экипажем. Обычно у FMS есть два идентичных FMC. При нормальных условиях один FMC выполняет все задачи управления полетом, в то время как другой FMC контролирует его работу. Второй компьютер заменяет первый, если происходит отказ системы.
Первичные данные для вычислений в FMC — это данные плана полета, введенные пилотами, данные, полученные от функционирующих систем самолета, и навигационные данные, находящиеся в информационной базе самолета. Результаты вычислений FMC — это значения тангажа, крена самолета и тяги двигателя, которые необходимы для того, чтобы лететь с оптимальным профилем полета. Команды поступают в систему управления полетом, автопилот и автомат тяги.
Интерфейс управления автоматизацией: пульт управления системой управления полетом (CDU)
Пульт управления системой управления полетом (CDU) (рис. 7.10) является электронным устройством, которое обеспечивает интерфейс между пилотом и FMS. В автоматизированной кабине есть два или три дисплейных блока управления, установленных на центральном пульте. Каждый из этих блоков может использоваться экипажем, чтобы вносить данные в FMS. Алфавитно-цифровые данные вводят через клавиатуру и читают результаты вычисления FMC на экране дисплея CDU.
Обычно левый пилот управляет левым CDU, а правый пилот — правым CDU. Центральным CDU (если он есть) могут управлять оба пилота, и он может иметь несколько отличные функции от вышеописанных.
Чтобы избежать конфликта между компьютерами, каждым CDU необходимо управлять по очереди. Во время полета PNF вводит необходимые данные в CDU, получает подтверждение от PF и затем выполняет ввод данных, нажимая специальную клавишу ввода. У более ранних моделей CDU не было функции ввода. Данные, введенные в CDU, немедленно вводились в FMC и начинался процесс вычисления. Это увеличивало вероятность ошибок ввода данных, приводящих к нежелательным отклонениям от необходимой траектории полета. Ошибок ввода помогает избежать более сосредоточенное внимание пилота при работе с CDU.
Распространенная ошибка в использовании CDU состоит в том, что оба пилота используют левый и правый CDU одновременно. Это может иметь два отрицательных последствия: 1) функционирование FMC может быть нестабильным в течение нескольких минут; 2) если оба пилота используют CDU одновременно, то ни один из них не пилотирует самолет (более опасное последствие).
При эксплуатации CDU пилоты должны придерживаться следующего правила защиты от ошибки: чем ближе самолет к аэродрому, тем меньше времени и внимания экипаж должен уделять работе с CDU. Все приготовления FMS должны быть закончены, когда самолет находится еще на земле, перед взлетом, или в полете, перед заходом на посадку, когда самолет имеет высоту выше 10 ООО футов. Экипаж может быть вынужден использовать CDU в то время, когда самолет находится в непосредственной близости от аэродрома (например, в случае, когда исходная процедура захода на посадку была изменена диспетчерами ОВД или по каким- либо причинам заменена ранее предусмотренной для посадки ВПП). В такой ситуации ввод изменений в данные через CDU абсолютно необходим, и оба пилота должны быть особенно внимательными при вводе параметров траектории и данных конфигурации самолета. Высоту 10 ООО футов можно рассматривать как границу между зонами интенсивного и вынужденного использования CDU
Интерфейс управления автоматизацией: управление автоматом тяги
Управление автоматом тяги. Пилоты могут управлять функционированием системы автомата тяги через MCP/FCU (см. рис. 7.3), через панель выбора режима тяги (см. рис. 3.8, 7.8) или через один из CDU (см. рис. 7.10).
Органы МСР обеспечивают управление эксплуатационными режимами автомата тяги и контроль за скоростью полета самолета, когда вертикальный профиль полета не вычисляется автоматически. Но когда на AFDS включен режим «VNAV», FMC вычисляет режим работы автомата тяги. В этом случае пилоты могут управлять функционированием автомата тяги, вводя в FMC через CDU все необходимые изменения параметров траектории полета.
Режим автомата тяги, выбранный на соответствующей странице CDU, используется для того, чтобы определить необходимый режим тяги на том или ином этапе полета — на взлете, при уходе на второй круг, в наборе высоты, расчет тяги на крейсерском режиме. Это устройство также используется для предварительного выбора допустимой температуры двигателей, чтобы получить данные для расчета, когда необходимо снизить тягу двигателей и, наконец, для расчета значения тяги, чтобы обеспечить экономичный режим работы двигателей во время взлета.
Интерфейс управления автоматизацией: сигнализатор режима полета (FMA)
Сигнализатор режима полета (flight mode annunciater — FMA). Это устройство, которое сообщает пилотам о режимах работы автоматизированных систем самолета, которые включены или готовы к работе. Постоянное поддержание ситуативного понимания является одной из самых важных задач экипажа. Много инцидентов и АП на автоматизированных самолетах происходят из-за неудовлетворительного ситуативного понимания экипажа. Современное оборудование самолета предоставляет пилотам полную информацию, необходимую для того, чтобы понять работу всех систем самолета.
Все задействованные режимы и некоторые другие режимы работы AFDS и автомата тяги представлены FMA, который является основной частью интерфейса между автоматикой самолета и членами экипажа. Он представлен в трех или четырех («Боинг») или в пяти («Аэрбас») ячейках в верхней области обоих PFD (см. рис. 5.1, 7.11). Режим автомата тяги показывается в левой ячейке. Все другие ячейки используются для демонстрации режима работы автопилота (AFDS).
Сигнализация режимов отмечается в ячейках FMA в двух (иногда в трех) строках. Верхняя строка показывает включенные режимы зеленым цветом, в то время как готовые к эксплуатации режимы представлены белым цветом на самолетах «Боинг» или синим цветом на самолетах концерна «Аэрбас» и показаны в нижней строке.
Существует одно важное правило, которое, если оно соблюдается, может помочь пилотам избежать ошибок, случающихся из за неадекватного управления автоматикой самолета и выбора того или иного режима. Хотя выбор режима сопровождается индикацией на MCP/FCU, после того, как любая манипуляция со средствами управления завершена, оба пилота должны использовать FMA для того, чтобы проверить включение желательного режима. Это правило проверки также применимо к любому новому выбору режима, осуществленному с помощью МСР. Пилоты должны проверить выбор на соответствующем индикаторе — PFD или ND.
В некоторых ситуациях в полете состояние AFDS и режимы работы автомата тяги изменяются автоматически, без вмешательства пилота, в других — посредством действий пилотов с органами управления автоматикой. Это происходит в том случае, когда ранее готовые режимы становятся действующими, например, режимы «Glideslope» и «Localizer capture» во время захода на посадку по ILS или когда предопределенные условия полета соблюдаются (например, при достижении заданной высоты уменьшается тяга при включении режима «VNAV»). В таких случаях пилоты должны знать, когда ожидается изменение режима и какой режим будет включен следующим. Они также должны проверить каждое автоматическое изменение режима по FMA
CFIT (Controlled Flight Into Terrain) - назначение, режимы работы СРПБЗ, классификация СРПБЗ.
Система раннего предупреждения о близости к земле (СРПБЗ) - это компьютерная система, обеспечивающая экипаж визуальной и звуковой сигнализацией о непреднамеренном сближении с подстилающей поверхностью с учетом этапа полета, времени реакции летного экипажа и скорости ВС.
Режимы работы СРПБЗ
Режим 1. Чрезмерная скорость снижения (рис. 17.11).
Режим 2. Чрезмерная скорость сближения с земной поверхностью в холмистой или горной местности или наземными сооружениямиРежим активен во время всего полета.Режим 2А — закрылки не в посадочном положении: Режим 2Б — закрылки в посадочном положении, высота по радиовысотомеру менее 250 м. "Земля, земля" и одновременно на КПИ высвечивается текст желтого цвета "Земля";
Режим 3. Потеря высоты после взлета или при уходе на второй круг
Режим 4. Недостаточный запас высоты над местностью при полете не в посадочной конфигурации Режим 4А — шасси убрано, закрылки в любом положении.Режим 4Б — шасси выпущено (стойки фиксируются замками в выпущенном положении), закрылки не в посадочном положении (угол менее 26°).
Режим 5. Чрезмерное отклонение вниз от радиотехнической глиссады при заходе на посадку (рис. 17.15). Режим 6. Превышение порогового значения разности геометрической и относительной барометрической высот.
Режим7. Оценка рельефа местности в направлении полета.
Режим 8. Преждевременное снижение при заходе на посадку.
Речевое оповещение. Этот режим обеспечивает формирование предупредительной и речевой сигнализации, когда ВС снижается ниже предопределенной высоты, высоты принятия решения (ВПР или DH — Decision height), минимумов, приближается к ВПР или минимумам. Предупреждение обеспечивается также при превышении максимально допустимого угла крена (в соответствии с руководством по летной эксплуатации ВС). При неточном заходе на посадку или если ВС находится за пределами сектора курса или глиссады, обеспечивается речевая сигнализация: "Сто пятьдесят" (ВС снизилось до высоты 150 м над подстилающей поверхностью или торцом ВПП).
Классификация СРПБЗ
СРПБЗ подразделяются на два класса:
класс А — для установки на тяжелые магистральные самолеты;
класс Б — для установки на другие самолеты. Имеет ограниченные возможности по сравнению с системами класса А.
СРПБЗ класса А обеспечивает передний обзор пространства, голосовое предупреждение о высоте над местностью, дисплей для отображения характера подстилающей поверхности, базу данных земной поверхности высокого разрешения для работы в зоне и вне зоны аэродрома, речевую сигнализацию о проходе заданной высоты.
СРПБЗ класса Б обеспечивает многие из функций систем класса А. Однако системы класса Б не требуют стыковки с радиовысотомером. Возможности базы данных ограничены. Например, такая система предоставляет экипажу данные о превышении высоты ВПП или вертодрома, но не содержит информации о подстилающей поверхности вокруг них. Системы класса Б не требуют обязательного подключения дисплея местности, хотя выход на дисплей есть.
ALAR (Approach and Landing Accident Reduction)
Использование FMS при заходе на посадку: автоматическая навигация во время захода на посадку
Автоматическая навигация во время захода на посадку. Полностью подготовленная FMS позволяет осуществлять вертикальную («VNAV») и горизонтальную («LNAV») навигации самолета. Полет выполняется в автоматическом режиме во время всего этапа подхода, пока посадочные режимы «localizer» и «glideslope» автоматически не включатся. Режимы «VNAV» и «LNAV» не требуют, чтобы пилоты управляли CDU или МСР Однако, если высота больше, чем высота захвата «glideslope», установленная на МСР, пилоты должны, следуя за FMS, переустановить следующую высоту на МСР, чтобы продолжить снижение.
Для того чтобы избежать нежелательных отклонений от маршрута захода в случае внезапного отказа FMS, пилоты должны в качестве резерва FMS использовать доступные радионавигационные средства — ADF, VOR и DME. Перед заключительной фазой захода пилоты обязаны проверить, что все необходимые радиосредства настроены и включены.
Чтобы быть подготовленными к заходу по неточной системе с использованием локатора (radar-vectored approach), пилоты должны вновь устанавливать курс выбранной схемы захода на ND каждый раз, когда FMS изменяет курс самолета.
Заход на посадку по локатору (radar-vectored approach) используется в районах аэропортов с очень плотным воздушным движением. Полностью автоматический заход на посадку может быть ограничен авиадиспетчером ОВД. Чтобы оптимизировать и упорядочить прибытие и вылеты самолетов, диспетчер часто использует так называемое «векторение» (radar vectoring). Он подает команды пилотам, которые должны выдерживать определенные курсы и высоты. После получения экипажем команды следовать с определенным курсом пилот должен немедленно выставить избранный курс на панели режимов МСР. Эта манипуляция отключает режим «LNAV», и дальнейшее управление в горизонтальной плоскости выполняется по командам, которые пилоты вводят на МСР. Точно так же после получения заданной высоты от службы ОВД, чтобы изменить высоту, экипаж должен установить заданную высоту МСР, используя переключатель «FLCH».
Страница CDU «legs» в режиме «Мар» обеспечивает изображение схемы захода на посадку на ND. Если служба ОВД не дает дополнительных указаний, экипаж должен продолжать полет непосредственно к точке захода. В этом случае пилоты должны первоначально развернуть самолет на точку, используя переключатель «HDG SEL», и изображение карты на ND повторно перепрограммирует FMS для навигации «прямо к», («direct to»), а затем включить режим «LNAV». Эти действия восстанавливают автоматическую горизонтальную навигацию.
Использование FMS при заходе на посадку: программирование захода на посадку
Программирование захода на посадку. Использование FMS для выполнения программирования захода необходимо для того, чтобы подготовить автоматические системы самолета к заходу, приземлению или/и уходу на второй круг. Обычно до снижения или в начале снижения пилоты получают информацию об используемой ВПП аэропорта назначения, рекомендуемых посадочных радиосредствах и текущей погоде в районе аэропорта. Эта информация позволяет экипажу начинать готовить FMS к заходу на посадку. Чтобы выполнить подготовку, пилоты должны ввести параметры намеченного захода в FMS. Каждый инструментальный заход выполняется в соответствии со STAR, которая содержит определенные точки и ограничения траектории полета. Для каждого захода назначается конкретная ВПП. Определенные радиосредства, используемые для захода, могут быть заранее определены диспетчерами ОВД или выбраны экипажем. Вся информация, относящаяся к заходу, содержится в специальных аэронавигационных документах. Специальный персонал авиакомпании по обслуживанию самолета заранее вводит эту информацию в базу данных FMS самолета. Первая страница FMS, которая используется для подготовки к заходу, является страницей «arrivals» (см. рис. 8.15), в которую экипаж должен ввести: выбранную схему захода, высоту перехода, данные о ВПП и тип инструментального захода.
Крейсерский,
или
режим снижения
На странице «legs» экипаж должен проверить точки входа в схему (рис. 8.17), введя снова STAR и навигационные данные схемы ухода на второй круг (the runway approach plate), а также проверить соответствие частот радиосредств заданным и данные требуемой траектории полета. Эти процедуры ухода на второй круг также должны быть проверены. Скорости и значения высот по каждой точке захода должны быть проверены и, если необходимо, исправлены.
Если на CDU есть страница «radio navigation», то эта страница используется для настройки необходимых радиосредств. Если не этой страницы, радиосредства должны быть настроены вручную. Каждый раз, когда радиосредство настроено, пилоты должны включить его на аудиопанели самолета.
Минимумы посадки (landing minimums), которые будут показаны на PFD, должны быть установлены на пультах управления пилотов EFIS.
Навигационные ошибки: ошибки инициализации (FMS)
Ошибки инициализации FMS. Ошибки инициализации FMS, сделанные пилотами во время подготовки к полету, типичны и включают неправильный ввод точек маршрута или их пропуск, неправильный ввод массы самолета и ограничений схемы выхода из района аэродрома (SID).
Неправильный ввод точек маршрута происходит, когда у базы данных FMS есть более одной точки маршрута с похожими идентификаторами и одна из них ошибочно вводится в страницу «legs». Для того чтобы избежать подобных ошибок, пилот должен вводить пункт только после того, как координаты были проверены по соответствующей навигационной документации.
Пропуск пункта маршрута в плане полета может произойти из-за проблемы с базой данных или невнимательного ввода, осуществляемого пилотами. Эта ошибка должна быть обнаружена и исправлена тщательной проверкой того, каким образом маршрут был введен на страницу «legs» CDU. Члены экипажа должны выполнять эту рутинную проверку каждый раз, когда вводится новый план полета или его новая часть.
Неправильный ввод массы на странице «performance» приводит к неправильному вычислению тяги двигателей для взлета. Эта ошибка происходит в том случае, когда неправильное значение массы самолета без топлива введено в правую строку. Это может также произойти, когда пилоты вводят значение массы без учета массы топлива в строку взлетной массы самолета. Осторожное, внимательное чтение необходимого названия строки прежде, чем сделать ввод, может помочь предотвратить такую ошибку.
Неправильный ввод стандартной схемы выхода из района аэродрома (SID) — это неправильный ввод ограничений, который может привести к нарушениям процедур уменьшения шума и, что более важно, к нарушениям безопасных высот. Эта ошибка может произойти, когда пилоты должны изменить величину, автоматически введенную из SID. Проверка новой величины, не совпадающей с исходной, полученной от диспетчерской службы ОВД, поможет избежать этой ошибки. Помогает избежать всех этих и подобных ошибок хорошее взаимодействие и перекрестная взаимопроверка в экипаже на всех этапах подготовки к полету.
Ошибки на маршруте летного экипажа иногда происходят во время полета по маршруту. Ошибки могут происходить по разным причинам: из-за небрежности пилотов при вводе данных, невнимательного управления автоматическими устройствами, нерационального распределения и переключения внимания на дисплеи и приборы при использовании навигационного оборудования.
Навигационные ошибки: неправильная оценка ПМ
Неправильная оценка характеристик ПМ. Корректная оценка предполагаемого времени пролета ППМ — одна из главных характеристик, необходимых экипажу. Эта информация используется для того, чтобы своевременно сообщить о положении самолета, спрогнозировать расход топлива и выполнить много других важных действий. Бортовой компьютер (FMC) вычисляет оценку пролета ППМ на основе фактических данных полета, введенных экипажем через CDU. Направление и скорость ветра вместе с температурой воздуха на высоте полета являются важными параметрами для расчета предполагаемого времени пролета ППМ. Необходимо помнить, что даже в одном и том же пункте земной поверхности обычно имеет место некоторое изменение вектора ветра и температуры на различных высотах. В наши дни перед каждым вылетом пилотам предоставляют достаточно точные метеорологические прогнозы. Поэтому вероятный источник неправильных вычислений времени FMC — это неправильный ввод атмосферных данных экипажем во время предполетной подготовки к полету, или полета по маршруту на других высотах, или с другими данными вектора ветра и температуры. Чтобы избежать этой ошибки, пилоты должны вводить в FMC атмосферные данные, которые соответствуют высоте и курсу фактического полета самолета. Полезной может быть следующая рекомендация: периодически сравнивать во время полета расчетные данные ветра и температуры, введенные ранее в CDU, с фактическими данными этих же параметров, которые представлены на дисплеях кабины экипажа.
Навигационные ошибки: невнимательность пилотов при изменении режима полета
Невнимательность пилотов при изменении режима полета. Бывают случаи, когда пилотов при выполнении полета, которым управляет автоматика, диспетчерская служба ОВД просит временно изменить вертикальную скорость самолета, его высоту или курс.
Изменение любого из этих параметров требует изменение режима AFDS, который будет отличным от «VNAV» или «LNAV». После того, как ограничение ОВД отменено и пилоты могут возобновить обычную навигацию, они могут из-за невнимательности оставить временно установленный режим: «V/S», «FLCH» или «HDG SEL», не включая прежний режим автоматики. Например, пилоты, чтобы возобновить нормальную навигацию, разворачивают самолет на запланированный маршрут полета, используя режим «HDG SEL», а не включают режим «LNAV». В этом случае, несмотря на то, что самолет выходит на заданный маршрут, автоматического подключения горизонтальной навигации не происходит. После пересечения маршрута самолет отклоняется от маршрута с курсом, выбранным только для того, чтобы выйти на трассу.
Непрерывный контроль задействованных режимов автоматизации может помочь экипажу избежать этой ошибки. Объявляя любое изменение режима FMA, пилот должен при этом назвать это изменение. Другой пилот должен подтвердить получение сообщения.
Навигационные ошибки: компромисс в обеспечении устойчивости самолета
Компромисс в обеспечении устойчивости самолета. В Руководстве по выполнению полета на самолете (Aircraft flight operations manual) подробно изложено, как выполнить полет самым безопасным и эффективным способом. Для каждого конкретного полета рекомендуется определенная оптимальная высота, которая обеспечивает максимальную экономическую эффективность полета и гарантирует при этом его безопасность. Выполнять полет на высоте ниже экономичной более дорого, выше этого эшелона устойчивость самолета, возможно, не будет удовлетворять установленным Руководством требованиям.
Чтобы сделать полет более комфортабельным для пассажиров и более безопасным в турбулентной атмосфере, разработчики Руководств по выполнению полета рекомендуют, чтобы экипаж поддерживал определенную скорость самолета в этих зонах. Если пилоты поднимаются выше оптимальной высоты или не установили заранее рекомендуемую скорость прежде чем войти в зону турбулентности, они подвергают самолет и всех людей в нем необоснованному риску, ставя под угрозу устойчивость самолета. Этой ошибки можно избежать, если точно выполнять рекомендации Руководства по выполнению полета .
Навигационные ошибки: запоздалое предупреждение об изменении погоды
Запоздалое предупреждение об изменении погоды. Автоматизированные самолеты оборудованы метеорологическими локаторами, которые необходимы для того, чтобы помочь пилотам быстро обнаружить и избежать попадания в зону опасных метеорологических явлений — атмосферных фронтов, гроз и кучево-дождевых (cumulonimbus) облаков. Иногда самолеты подвержены обледенению, граду и интенсивному воздействию турбулентности. Одной из возможных причин этого может быть невнимательность экипажа и ненадлежащее использование метеорологического локатора, а также ошибки, выражающиеся в решении продолжать полет, не изменяя курс, несмотря на близость опасных погодных явлений. Этой ошибки экипаж может избежать, если будет вести непрерывный контроль информации, генерируемой локатором, в процессе полета в облаках и своевременное осуществление маневров, необходимых для того, чтобы избежать попадания самолета в зону опасных атмосферных явлений.
Навигационные ошибки: неправильное обновление данных инерциальной системы (1RS)
Неправильное обновление данных инерциальной системы (IRS). Если самолет не оборудован GPS или ее эксплуатация не надежна, система IRS является главным источником навигационных данных. Ошибки в навигации могут быть вызваны неправильной эксплуатацией IRS, а также если данные о местоположении самолета от IRS поступают в FMC, но должным образом не обновляются. Обычно обновление выполняется автоматически от VOR и DME, которые включают FMS, или вручную, когда пилоты настраивают эти устройства, чтобы получить необходимые навигационные данные. Чтобы обеспечить непрерывное обновление данных IRS, VOR и средства управления DME на пультах управления EFIS в течение полета должны находиться в положении «AUTO». Ручное использование VOR и оборудования DME рекомендуется только для короткого промежутка времени (например, для временного следования за VOR радиалом по команде службы ОВД на этапе крейсерского полета или при выполнении захода на посадку по неточной инструментальной системе).
Ошибки, совершаемые при заходе на посадку: неправильная информационная база данных
Неправильная информационная база данных. Обычно в базе данных БМ8 автоматизированных самолетов есть вся информация, необходимая для безопасного и эффективного завершения полета. Однако иногда информация базы данных, используемая пилотами, может быть неправильной или часть информации даже может отсутствовать. Это может произойти в том случае, если пилоты должным образом не проверяют полноту и правильность базы данных перед вылетом или ошибочно используют старые или поврежденные данные. Может также иметь место несоответствие между информацией, содержавшейся в базе данных БМ8 самолета, и информацией, находящейся в изданных навигационных документах. Указанное несоответствие может быть результатом нарушенных сроков обновления, установленных в авиакомпании для электронных и информационных копий документов. Обычно бумажные файлы копий документов обновляются чаще. Чтобы избежать ошибок, вызванных недействительными аэронавигационными данными, пилотам советуют перед вылетом проверить аэронавигационную документацию и ее соответствие контрольным экземплярам справочной документации. Должна использоваться информация с последней датой выпуска. Помощь от службы ОВД может состоять в подтверждении юридического соответствия аэронавигационной информации.
Ошибки, совершаемые при заходе на посадку: неправильная установка давления аэродрома
Неправильная установка давления аэродрома. Давление аэродрома назначения устанавливается на эшелоне перехода и является обязательным условием безопасности любого полета. Но иногда пилоты нарушают это условие: они либо устанавливают неправильное давление аэропорта назначения, либо давление остается стандартным, которое было при полете на эшелоне (1013,2 hPa, 360 мм рт. ст. или 29,92 Hg). К такой ошибке может привести множество факторов: неправильно полученная информация о погоде аэродрома назначения, плохое освещение в кабине ночью, дефицит времени, которым располагает экипаж, и простая забывчивость. Следствием любого из этих факторов может быть тяжелое АП. Два простых правила могут помочь пилотам избежать этой ошибки: 1) установка давления на всех высотомерах в кабине должна быть проверена и подтверждена обоими пилотами; 2) в контрольной карте, выполняемой при заходе на посадку, должен быть пункт «Высотомер установлен, проверен», и этот пункт должен быть неформально выполнен на эшелоне перехода.
Ошибки, совершаемые при заходе на посадку: неправильная конфигурация самолета
Неправильная конфигурация самолета. Члены экипажа вручную управляют закрылками, предкрылками, интерцепторами и шасси самолета. Обычно в самолете есть несколько различных положений этих. Более того, если шасси и закрылки не подготовлены к посадке, специальные световые и звуковые сигналы сообщают пилотам об этом. Но иногда аварийная система может отказать или информация, которую она предоставляет, может быть недостаточно интенсивной, чтобы ясно сообщить пилотам о неправильной конфигурации самолета при заходе на посадку. Хорошо известны примеры такого рода ошибок (например, заход с выпущенными интерцепторами на малой высоте).Эта ошибка может значительно уменьшить управляемость самолета и создать прямую угрозу безопасности полета. Чтобы избежать этой ошибки, пилоты должны проверить и подтвердить, что положения шасси, закрылков и интерцепторов соответствуют этапу полета. Чтобы гарантировать, что интерцепторы будут выпущены и убраны вовремя, PF должен держать руку на рычаге интерцепторов все время, пока интерцепторы используются.
Ошибки, совершаемые при заходе на посадку: неудовлетворительное взаимодействие членов экипажа
Неудовлетворительное взаимодействие членов экипажа. Пилоты автоматизированного самолета должны выполнять свои обязанности в соответствии с процедурами и установленными правилами распределения обязанностей в процессе полета. Один пилот должен полностью сконцентрироваться на поддержании необходимых параметров траектории полета, в то время как другой пилот должен контролировать системы самолета и выполнять необходимые действия с CDU и другими устройствами. Выполнение этого требования во время захода на посадку — самый важный фактор для обеспечения безопасного завершения полета.
Очень редко заход на посадку происходит точно так, как его запланировал экипаж и к которому они подготовили самолет. Аэронавигационная ситуация в районе аэропорта назначения может быстро измениться и потребовать дополнительных действий экипажа для завершения захода и производства посадки. От экипажа автоматизированного самолета эти изменения почти всегда требуют корректировки исправлений программы работы РМ8: настройку на другие радионавигационные средства и изменения маршрута полета самолета.
Чтобы избежать ошибок в ситуациях, которые могут привести к нарушению безопасных высот и безопасных интервалов между самолетами, пилоты должны постоянно контролировать траекторию полета самолета, знать, как они хотят лететь и куда летят фактически.
Ошибки, совершаемые при заходе на посадку: проблемы коммуникации
Проблемы коммуникации. Пилот самолета — не единственный человек, кто выполняет полет. В процессе полета пилот постоянно общается с другими людьми: членами своего экипажа, диспетчерами службы ОВД, а иногда и с экипажами других самолетов.
Коммуникация между пилотами важна потому, что каждый из двух пилотов выполняет различные задачи. Качественная коммуникация — единственное средство для того, чтобы обеспечить взаимное резервирование пилотами друг друга, которое необходимо для исключения незамеченных ошибок при выполнении ими своих обязанностей.
Диспетчеры ОВД должны предоставить пилотам самолета жизненно важную информацию. Диспетчеры также получают информацию от пилотов, которая важна для принятия ими правильных решений и подачи адекватных команд всем летным экипажам, которыми они управляют.
Четыре фактора могут значительно повлиять на снижение качества коммуникации:
плохая радиосвязь;
языковые трудности;
использование нестандартной фразеологии ведения связи;
психологическое состояние участников процесса коммуникации.
Языковые барьеры составляют существенную проблему при выполнении международных полетов.
Чтобы избежать ошибок коммуникации, вызванных неправильным пониманием, особенно при выполнении полета, должны использоваться только общепринятые значения слов, терминов и выражений.
Удовлетворительная коммуникация — это важный источник хорошего ситуативного понимания пилотов и диспетчеров службы ОВД. Взаимное ситуативное понимание экипажа и диспетчера, в свою очередь, является лучшей защитой от навигационных ошибок.
Электронная навигационная система самолета: инерциальная система (ИНС)
Инерциальная система (ИНС) (inertial reference system — 1RS) является полностью автономным средством навигации самолета. Ее называют «бесплатформенной» инерционной системой, потому что она выполняет все вычисления, связанные с фюзеляжем самолета. Эта система измеряет ускорение самолета и его вращение вокруг трех осей (x, у, z), ив любой момент выдает параметры движения самолета: текущее положение, ускорение, путевую скорость, вертикальную скорость, и курс. 1RS также вычисляет направление, скорость ветра. Она снабжает данными дисплеи системы управления полетом, средства управления полетом, автомат тяги двигателей и другие системы (рис. 8.1).
Чтобы достигнуть необходимого уровня точности вычислений и эксплуатационной надежности автоматизированного самолета, 1RS обычно имеет три идентичных блока инерциальной системы (inertial reference unit — IRU). У каждого блока есть свои датчики и компьютер. Датчики содержат три лазерных гироскопа и три акселерометра, которые вырабатывают электрические сигналы, пропорциональные любому движению IRU. Каждый блок IRU установлен с неподвижной ориентацией к продольной, горизонтальной и вертикальной осям самолета.
Экипаж управляет 1RS со специального пульта управления (рис. 8.2). Чтобы калибровать вычисления, необходимо установить систему в начальное положение и выполнить ее центрирование, которое требует удержания самолета в неподвижном стояночном положении в течение определенного промежутока времени (приблизительно 10 мин). Начальное положение самолета вводится в 1RS через дисплейный блок контроля (CDU) после того, как его центрирование закончено.
Навигационный режим — это основной режим эксплуатации 1RS. Обычно он включается автоматически после центрирования системы и используется в процессе полета. Другой режим — пространственное положение (attitude 1RS) — является вспомогательным режимом. В случае, если центрирование системы во время полета нарушено, экипаж может использовать этот режим, чтобы получить информацию о пространственном положении самолета (см. рис. 8.2).
Электронная навигационная система самолета: спутниковая навигационная система (GPS)
Спутниковая система определения местоположения ВС (global positioning system — GPS) является другой навигационной системой, работа которой основана на принципе одновременных измерений направления и расстояний от нескольких, обычно четырех, искусственных спутников Земли (рис. 8.3). В результате компьютерной обработки измерений, которые очень точны, производится вычисление навигационных координат и других параметров траектории полета, после чего они поступают в FMS и другие системы самолета.
Системы GPS, установленные на автоматизированных самолетах, работают независимо от экипажа и задействуются, как только у самолета включается электрическое питание.
Электронная навигационная система: VOR/DME
Угломерные радионавигационные средства (станции VOR) предназначены для того, чтобы преодолеть недостатки низко- и среднечастотных радиоприемников. В авиационной радионавигации и радиосвязи используются высокочастотные (very-high-frequency — VHF) сигналы. Эти сигналы обеспечивают значительно большую стабильность навигационных параметров во всех географических областях и в любое время суток. Несмотря на то, что эти сигналы могут распространиться только в пределах прямой видимости, большая высота полетов ВС сделала системы VHF очень популярными в авиации.
Самолет, оборудованный угломерным радионавигационным средством VOR, имеет радиоприемник, который способен определить направление на станции-излучатели. Принцип работы VOR приемника отличается от принципа работы ADF: здесь используется только одна антенна и при этом радиосигнал имеет более сложную структуру. Но эти различия не принципиальны для экипажа. Более важным является то, что данные VOR надежны и устойчивы в пределах диапазона от нескольких километров до многих сотен километров. Индикатор VOR показывает магнитный азимут или радиал от наземной станции на самолет (поз. 3 на рис. 8.5).
Часто наземная станция VOR объединена с другим навигационным VHF средством, которое измеряет расстояние.
Оборудование, измеряющее расстояние (distance measuring equipment — DME), является устройством, которое получает сигналы наземной станции VOR/DME и вычисляет расстояние между самолетом и станцией. В «стеклянной кабине» данные DME показывают на PFD и ND и используются для определения местоположения навигационных точек на воздушных трассах и в районах аэропортов.
На некоторых аэродромах оборудование DME также установлено вместе с оборудованием системы посадки по приборам (ILS). Это делается для того, чтобы снабдить экипаж важной информацией во время захода на посадку по приборам, а именно расстоянием до ВПП.
Оборудование VOR/DME устанавливается на автоматизированных самолетах, как правило, в двух экземплярах. Каждый набор может быть включен FMS автоматически или вручную пилотом. При нормальной эксплуатации FMS система настраивает VOR и соответствующее оборудование DME для получения информации о положении самолета. ND должен быть в режиме «Мар» или «Plan», чтобы была возможность для FMS настроить системы VOR.
Электронная навигационная система самолета: система захода на посадку (ILS)
Система посадки по приборам (instrument landing system — ILS) является специальной радионавигационной системой, используемой для вывода самолета к ВПП во время снижения на заключительном этапе захода на посадку. Принцип работы ILS основан на одновременном использовании двух радиосигналов, которые сформированы в вертикальной и наклонной плоскостях. Два передатчика (радиомаяка) излучают сигналы в точно определенном направлении. Один из сигналов, названных курсовым лучом (localizer beam), излучается в вертикальной плоскости, совпадающей с осью ВПП. Другой сигнал — луч глиссады (glideslope beam) — излучается в направлении наклона глиссады самолета, пересекает поверхность ВПП около намеченной точки приземления и тем самым формирует угол с ВПП, равный установленному углу наклона глиссады. Воображаемая линия, созданная двумя взаимно перпендикулярными плоскостями, формирует траекторию захода на посадку.
В дополнение к радиомаякам курса и глиссады, наземное оборудование ILS содержит внешние, средние и внутренние маркеры (см. рис. 5.24) и наземную светотехническую систему. Внешние и средние маркеры могут быть резервом для радиомаяков. DME может быть заменен внешним маркером. В самолете имеется два радиоприемника (курсовой и глиссадный), которые распознают отклонение самолета от траектории полета и вырабатывают соответствующие сигналы отклонений, показываемые экипажу. В самолетах предыдущих поколений прибор содержит планки, называемые позиционными планками, или бленкерами, которые и обеспечивают индикацию. Точка пересечения планок показывает желательное местоположение траектории полета относительно центра массы самолета. В «стеклянной кабине» любые отклонения от курса и глиссады показаны на PFD (см. рис. 2.2). Положение символов в середине дисплея указывает на нулевое отклонение ВС от траектории захода. Индикация системы ILS может также быть отображена и на ND.
Приемник сигнала маркера (marker signal receiver). Чтобы указать моменты, когда самолет пролетает важные точки, специальные радиопередатчики (радиомаяки) устанавливаются в этих точках (см. рис. 5.24). Такие передатчики называют передатчиками маркера (marker transmitters), или просто маркерами (markers). Все маркеры излучают узкие радиолучи вертикально вверх. В момент, когда самолет пролетает над маркером, самолетный приемник указывает этот момент звуковыми и световыми сигналами.
Навигационная система самолета: автоматический радиокомпас (АРК)
Автоматические радиокомпасы (АРК) (automatic direction finders — ADF) являются низко- и среднечастотными радиоприемниками с двумя антеннами. Одна антенна имеет круговую диаграмму направленности, другая, так называемая антенна петли, имеет восьмилепестковую форму направленности.
Суммарный сигнал радиостанции, полученный обеими антеннами, достигает своих оптимумов мощности (максимума или минимума) только в одном положении второй антенны (антенны петли). Положение второй антенны, соответствующее сигналу оптимума автоматически определяется и показывается на приборах в кабине на индикаторе ADF. Индикация ADF дает пеленг от самолета на радиостанцию. В «стеклянной кабине» эти данные могут быть представлены на ND. Управляются ADF с его пульта управления (рис. 8.4).
Низкие и средние частоты, используемые для функционирования ADF, могут быть легко генерированы, переданы и усилены. Они генерируются соответствующим наземным оборудованием и принимаются самолетным оборудованием. Но иногда эти сигналы могут быть искажены или ослаблены различными атмосферными явлениями (например, грозой). Другой недостаток этих сигналов — их неустойчивость в горной местности, ночью и в период интенсивной солнечной радиации, особенно в высоких широтах. Все эти факторы могут значительно уменьшить точность данных, полученных от ADF. Из-за этих недостатков ADF может надежно использоваться только в районе аэропортов или когда излучаемые сигналы достаточно сильные.
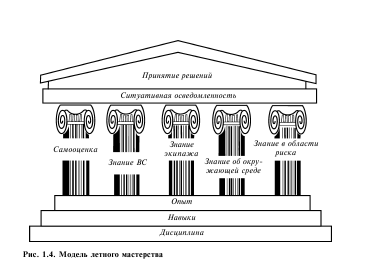
Структура летного мастерства
Сигнализация сдвига ветра
Предупреждения о сдвиге ветра (windshear alerts). Во время полета ветер может неожиданно и довольно значительно изменить свою скорость и направление. Это погодное явление называют сдвигом ветра (windshear). Обычно ветер появляется незадолго до грозы, при развитии кучево-дождевых (cumulonimbus) облаков или других атмосферных явлений, таких как быстрое перемещение атмосферных фронтов или в областях со сложной подстилающей поверхностью при резком перепаде температур. Сдвиг ветра в его самой опасной для авиации форме, названной микровзрывом, может лишить самолет способности поддерживать высоту полета. В 1990-х годах сдвиг ветра был седьмой среди самых частых причин АП, происходящих с коммерческими самолетами.
Чтобы определить, существует ли сдвиг ветра система использует датчики воздушных сигналов и данные инерционных систем и предоставляет экипажам возможность идентифицировать сдвиг ветра после входа в него.
Технология системы PWS позволяет погодным локаторам просматривать атмосферу перед самолетом и обнаруживать сдвиг ветра прежде, чем самолет войдет в зону его действия [22].
На автоматизированных самолетах последнего поколения предупреждение о сдвиге ветра предоставляются GPWS и погодным локатором. Если в полете на высоте ниже 1500 футов по радиовысотомеру GPWS обнаруживает попадание самолета в сдвиг ветра, подается сигнал «Airplane in windshear» («Самолет в сдвиге ветра») и звучит двухтоновая сирена, сопровождаемая звуковым предупреждением «Windshear». Одновременно на PFD появляется надпись красного цвета «Windshear» (см. рис. 5.12).
Погодный локатор обеспечивает предупреждения о сдвиге ветра, обнаруживая опасные воздушные зоны до попадания самолета в эту зону. Эта функция погодного локатора в состоянии обнаружить сдвиг ветра только в воздушных массах, содержащих некоторый уровень влажности или корпускулярного вещества. Погодный радар автоматически просматривает пространство в режиме определения сдвига ветра после взлета до высоты 1200 футов по радиовысотомеру. Погодный радар обнаруживает микровзрывы и другие виды сдвига ветра с подобными особенностями, но это не обеспечивает предупреждения для всех видов сдвига ветра. Поэтому экипажи должны продолжать использовать традиционные методы предотвращения попадания в сдвиг ветра.
Если сдвиг ветра обнаружен непосредственно перед самолетом, подается звуковой аварийный сигнал «Windshear ahead», сообщение в виде надписи красного цвета «Windshear» появляется и на обоих PFD, и на и обоих ND. Кроме того, красный символ сдвига ветра показывается и на основном блоке световой сигнализации.
Если область сдвига ветра обнаружена в пределах 1,5 миль непосредственно перед самолетом во время захода на посадку, подаются звуковые сигналы «Go around, windshear ahead». Кроме того, появляются также красные световые сообщения «WINDSHEAR» и на обоих PFD, и на обоих ND.
Сигнализация турбулентности при ясном небе
Турбулентность при ясном небе на больших высотах — это другая проблема, которая угрожает безопасности полетов коммерческих самолетов. Корпорация «Coherent Technologies Inc», создающая бортовое оборудование, развивает технологии базирующиеся на использовании инфракрасного допплеровского бортового локатора для обнаружения и измерения турбулентности, который может позволить пилоту контролировать положение серьезных зон турбулентности и избежать попадания в них [23]. Испытания этого оборудования показали, что оно способно обеспечить предупреждение даже об умеренной турбулентности за 30 с до входа в эту зону.
Специалисты «Coherent Technologies Inc» оценили, что датчики турбулентности, созданные для коммерческих самолетов, обеспечили бы предупреждения на высотах крейсерского полета в 30 ООО— 40 ООО футов и на скоростях при числе М < 0,8 за 30—60 с.
Основные сведения о FMA
Сигнализатор режима полета (flight mode annunciater — FMA). Это устройство, которое сообщает пилотам о режимах работы автоматизированных систем самолета, которые включены или готовы к работе. Все задействованные режимы и некоторые другие режимы работы AFDS и автомата тяги представлены FMA, который является основной частью интерфейса между автоматикой самолета и членами экипажа. Он представлен в трех или четырех («Боинг») или в пяти («Аэрбас») ячейках в верхней области обоих PFD (см. рис. 5.1, 7.11). Режим автомата тяги показывается в левой ячейке. Все другие ячейки используются для демонстрации режима работы автопилота (AFDS).
Сигнализация режимов отмечается в ячейках FMA в двух (иногда в трех) строках. Верхняя строка показывает включенные режимы зеленым цветом, в то время как готовые к эксплуатации режимы представлены белым цветом на самолетах «Боинг» или синим цветом на самолетах концерна «Аэрбас» и показаны в нижней строке.
Существует одно важное правило, которое, если оно соблюдается, может помочь пилотам избежать ошибок, случающихся из за неадекватного управления автоматикой самолета и выбора того или иного режима. Хотя выбор режима сопровождается индикацией на MCP/FCU, после того, как любая манипуляция со средствами управления завершена, оба пилота должны использовать FMA для того, чтобы проверить включение желательного режима. Это правило проверки также применимо к любому новому выбору режима, осуществленному с помощью МСР. Пилоты должны проверить выбор на соответствующем индикаторе — PFD или ND.
В некоторых ситуациях в полете состояние AFDS и режимы работы автомата тяги изменяются автоматически, без вмешательства пилота, в других — посредством действий пилотов с органами управления автоматикой. Это происходит в том случае, когда ранее готовые режимы становятся действующими, например, режимы «Glideslope» и «Localizer capture» во время захода на посадку по ILS или когда предопределенные условия полета соблюдаются (например, при достижении заданной высоты уменьшается тяга при включении режима «VNAV»). В таких случаях пилоты должны знать, когда ожидается изменение режима и какой режим будет включен следующим. Они также должны проверить каждое автоматическое изменение режима по FMA.
Применение контрольных карт проверок
Стандартные процедуры выполняются членами экипажа по памяти и в индивидуальном для каждой панели кабины ВС порядке. Критические с точки зрения безопасности полета действия (в первую очередь касающиеся конфигурации ВС) должны быть проверены по карте контрольных проверок.
Применение ККП повышает безопасность, обеспечивая возможность подтвердить или скорректировать критические элементы состояний систем и конфигурации ВС.
ККП не выполняются методом "читай и делай" (read and do), а применяются после завершения последовательности действий по стандартным рабочим процедурам. Правильное выполнение ККП крайне важно для безопасной эксплуатации ВС, особенно перед взлетом или заходом на посадку и посадкой.
Для эффективности контроля по ККП существенно соблюдение следующих общих правил:
во избежание спешки и прерываний, противоречащих требованиям безопасности, выполнение ККП следует (по возможности) планировать на периоды меньшей рабочей нагрузки;
распределение времени и рабочей нагрузки (т.е. учет возможностей другого члена экипажа) являются ключевыми в определении момента начала и эффективности выполнения контроля по ККП.
Основной принцип выполнения ККП: запрос — ответ (challenge and response). Критические пункты требуют обязательного подтверждения пилотирующего пилота (PF); по другим, менее значимым, запрос — ответ может выполнить непилотирующий пилот (PNF).
Для лучшего взаимодействия и взаимопонимания между членами экипажа ВС всегда следует применять следующие стандартные правила:
отвечающий член экипажа должен отвечать только после проверки или корректировки конфигурации;
если достижение требуемой конфигурации невозможно, то отвечающий член экипажа объявляет фактическое состояние;
во всех случаях запрашивающий пилот должен дождаться ответа (и проверить его правильность) до перехода к следующему пункту;
Р№ должен сообщать об окончании контроля по карте.
При необходимости прерывания ККП по какой-либо причине РБ объявляет об этом. Продолжение контроля по карте начинается с команды: "Возобновить выполнение ККП с пункта...". При возобновлении ККП после прерывания следует повторить последний завершенный пункт — такое перекрытие предотвращает пропуск следующего пункта ККП.
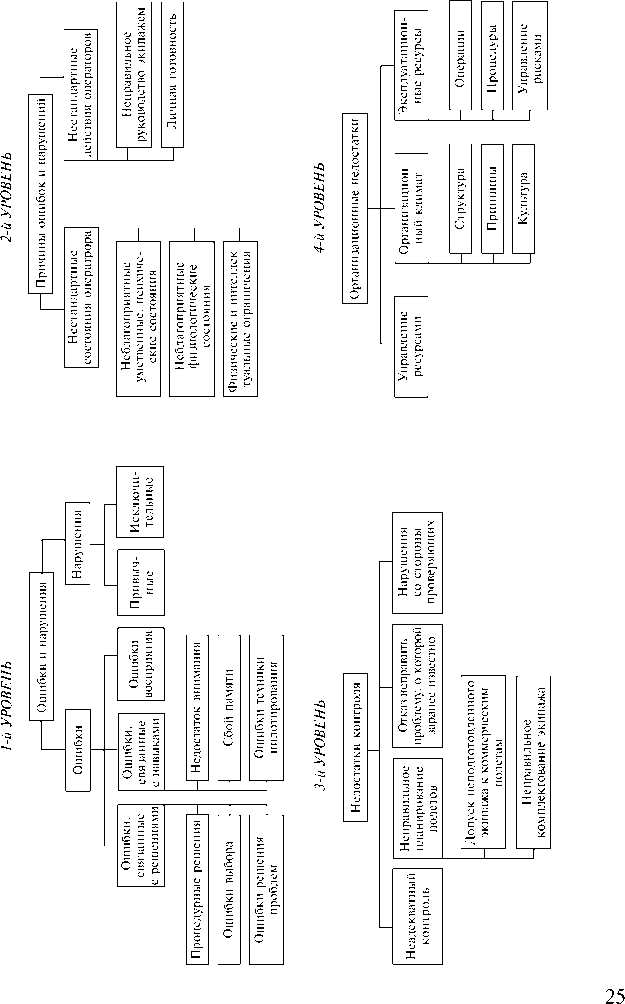 Методы
анализа АП HFACS
Методы
анализа АП HFACS
Основные сведения о GPWS (EGPWS)
Система предупреждения о приближении к земле (СППЗ — GPWS) предоставляет экипажу информацию о потенциально опасных условиях полета, которые угрожают столкновением с землей.
Cовременные СППЗ (GPWS) обеспечивают все три категории предупреждения о приближении к земле: предупреждение, основанное на измерении величины радиовысоты, предварительное предупреждение о повышении ландшафта и изображение ландшафта.
Предупреждение, основанное на измерении радиовысоты (radio- altitude based alerts). Это предупреждение сформировано в результате обработки данных, полученных от радио- и барометрических высотомеров, скорости полета, глиссады и датчиков конфигурации самолета. Эта категория тревог включает следующие критические отклонения (подробнее см. в работе [1]):
чрезмерную вертикальную скорость снижения самолета (рис. 6.1);
чрезмерную скорость сближения с земной поверхностью или наземными сооружениями (рис. 6.2);
потерю высоты после взлета или начала маневра ухода на второй круг (рис. 6.3);
опасную высоту пролета местности (unsafe terrain clearances), когда самолет не находится в посадочной конфигурации (рис. 6.4);
чрезмерное отклонение ниже глиссады при использовании системы ILS (рис. 6.5).
Предупреждения предоставляются экипажу и в звуковой, и в визуальной формах. Звуковая тревога в виде сообщения «don’t sink»; кроме того, загорается табло «GND PROX» с предупреждением о чрезмерной потере высоты после взлета или при уходе на второй круг.
Чрезмерная норма закрытия ландшафта генерирует звуковую тревогу «terrain» («земля») и загорание GND PROX (см. рис. 6.4). Если чрезмерная норма закрытия ландшафта продолжается и шасси и/или закрылки не находятся в посадочной конфигурации, генерируется звуковая тревога «Pull up» и сообщение «PULL UP» загорается на обоих PFD. Оно сопровождается световой сигнализацией.Чрезмерная норма снижения генерирует звуковую тревогу «sink rate» и загорается GND PROX. При дальнейшем снижении, когда самолет находтся ниже глиссады (см. рис 6.5), срабатывает звуковая тревога «Glideslope» («Глиссада»), Интенсивность и частота повторения этого предупреждения увеличиваются пропорционально величине отклонения. Предупреждение может быть отменено или запрещено ниже радиовысоты 1000 футов специальным выключателем.
Опасное приближение к земле на большой скорости полета, либо с невыпущенным шасси, либо с невыпущенными закрылками вызывает звуковую тревогу «Too low, terrain» («Слишком низко, земля»). При этом загорается табло «GND PROX».
Опасная высота пролета местности на малой скорости с невыпущенными закрылками или с невыпущенным шасси сопровождается звуковыми предупреждениями «Too low, flaps» («Слишком низко, закрылки») или «Too low, gear» («Слишком низко, шасси»). При этом загорается табло GND «PROX».
Отличительные черты ВС последнего поколения
Для самолетов последнего поколения характерны следующие особенности:
1)экипажи состоят из двух пилотов (пока в самолетах иностранного производства);
2)кабины оборудованы жидкокристаллическими дисплеями
3)высокая степень автоматизации управления ВС и его системами, которая стала возможна вследствие применения мощных бортовых ЭВМ
Эти характерные особенности взаимосвязаны. Выполнение полетов экипажами, состоящими из двух пилотов, стало возможным из-за высокой степени автоматизации — бортовому компьютеру передано большое число объемных и требующих точных вычислений операций, таких как, например, решение навигационных задач, задач пилотирования. При этом не является очевидным, что интеллектуальная нагрузка членов экипажа снизилась. По некоторым данным она даже увеличилась, в связи с чем организация работы экипажа требует большей регламентации. Именно этим объясняются особые условия коммуникации в кабине современного ВС, строгое соблюдение технологии работы, взаимная перекрестная проверка пилотами работы друг друга, формулирование и строгое выполнение "золотых” правил эксплуатации и появление других особенностей в деятельности пилотов на данных ВС.
Применение ЖКД позволяет уменьшить количество информации, представляемой пилотам в каждый определенный момент времени (на каждом этапе полета предъявляется только необходимая для данного этапа информация). Однако применение ЖКД не позволяет категорически утверждать, что количество информации уменьшается. Действительно, индикаторов стало значительно меньше (рис. 17.3, 17.4), но информации на каждом из них значительно больше, чем на традиционных индикаторах, при этом необходимо учесть, что каждый экран имеет, как правило, большое число страниц, которые экипаж имеет возможность "листать", как книгу .
Часто, когда хотят подчеркнуть высокую степень автоматизации самолета, говорят ''fly by ware", что дословно можно перевести с английского языка "летит по проводам". Аналогом этого термина на русском языке может являться "компьютеризированный" самолет. Данный термин в достаточной степени отражает существо введенного новшества, которое заключается не только в том, что на этом самолете отсутствует механическое управление аэродинамическими поверхностями, но также подчеркивает, что бортовой компьютер играет значительно большую роль, чем на обычном самолете. Компьютер принимает через датчики управляющие сигналы пилота, анализирует их на безопасность (не приведут ли они к выходу за предельно допустимые характеристики) и окончательно корректирует величину допустимого управляющего воздействия.
Основные задачи автоматизации
Можно сформулировать семь основных задач автоматизации ВС:
1)повышение безопасности полетов;
2)увеличение экономичности полетов, их надежности и качества обслуживания пассажиров (например, регулярности полетов);
3)уменьшение рабочей нагрузки на членов экипажа и создание предпосылок для уменьшения числа членов экипажа ВС (до двух пилотов) при повышении производительности их труда;
4)снижение требований к уровню квалификации летного персонала;
5)повышение точности при выполнении маневров при осуществлении навигации и пилотирования;
6)обеспечение гибкости и избирательности в представлении экипажу необходимой информации;
7)уменьшение объема пространства кабины экипажа.
Основные «золотые» правила