

1. Кинематический анализ сооружений
Инженерные сооружения в процессе эксплуатации должны сохранять свою первоначальную форму и первоначальное положение относительно основания или земли.
Системы, изменение формы и первоначального положения которых под действием нагрузок может происходить только в результате деформирования отдельных элементов, называются геометрически неизменяемыми и неподвижными.
Сооружения, как правило, образуются из набора отдельных простых элементов. Отдельными элементами плоских стержневых систем являются стержни разной формы в соответствии с рис. 1.

Рис. 1.1. Виды простых стержней
С целью выявления геометрической неизменяемости и неподвижности системы проводится кинематический анализ сооружения, то есть устанавливаются количественные соотношения между элементами сооружения и связями, необходимыми для их соединения, а также способы правильного соединения отдельных элементов и частей сооружения между собой.
Количественно изменяемость и подвижность системы и её элементов характеризуется числом степеней свободы – П.
Степенью свободы какого-либо тела или системы тел называется количество независимых друг от друга геометрических параметров, определяющих положение тела в заданной системе координат.
Перемещение
подвижной точки в плоскости определяется
двумя параметрами X
и Y,
а перемещение простого диска – тремя
параметрами X,
Y,
![]() –в
соответствии с рис. 1.2,а и 1.2,б.
–в
соответствии с рис. 1.2,а и 1.2,б.
Простым диском Д называется односвязное тело, изменение первоначальной формы которого вызывается только деформациями материала. Односвязное тело можно “обойти” по всей границе, не пересекая само тело (рис. 1.3).
Устройство, уничтожающее одну степень свободы системы, называют кинематической связью.
Каждая кинематическая связь имеет кинематическую и статическую или силовую характеристики:
– кинематическая характеристика определяет, сколько степеней свободы уничтожает одна связь и каким движениям одного диска относительно другого препятствует;
– статическая характеристика определяет реакции, возникающие в связи.

Рис 1.2. Перемещения точки и диска

Рис. 1.3. “Обход” односвязного тепла без пересечений
1.1. Типы связей плоских систем
Стержень с шарнирами по концам:
препятствует поступательному движению по направлению стержня;
уничтожает одну степень свободы;
возникает реакция, направленная вдоль стержня.
Цилиндрический шарнир:
препятствует поступательным перемещениям;
уничтожает две степени свободы;
возникает реактивная сила любого направления, проходящая через шарнир, которую можно разложить на две составляющие по заданным направлениям;
эквивалентен двум стержням.
Припайка:
препятствует как поступательным перемещениям, так и повороту одного диска относительно другого;
уничтожает три степени свободы;
возникает реактивная сила любого направления, проходящая через любую точку припайки, момент относительно этой точки или две силы заданного направления момент относительно точки их пересечения;
эквивалентна трём стержням или шарниру и стержню.
Связи плоских систем приведены на рис. 1.4.
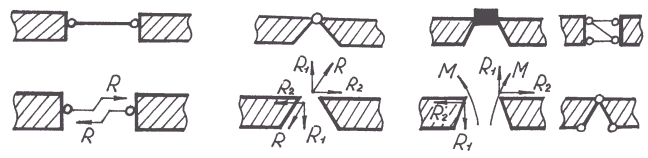
Рис. 1.4. Типы кинематических связей плоских систем
Если шарнир или припайка соединяют не два диска, а более, то такие связи кратные и заменяют столько простых шарниров и припаек, сколько дисков они соединяют без одного.
Места соединения дисков шарнирами или припайками называют узлами. Узлы бывают идеально-шарнирные и жёсткие.