

3.3. Метод ветвей и границ. Общая схема
Метод ветвей и границ представляет собой комбинаторный метод, т.е. упорядоченный перебор вариантов и рассмотрение лишь тех из них, которые по некоторым признакам оказываются перспективными. Он имеет достаточно широкую сферу применения, поэтому рассмотрим его общую схему.
Пусть существует некоторая функция f(X), экстремум которой (например, максимум) необходимо найти при некоторой системе ограничений.
Этой
системой определяется ОДП задачи -
обозначим ее G.
Пусть некоторым способом мы можем
определить верхнюю границу функции на
этой области
![]() 0,
т.е.
0,
т.е.
![]() 0
0
![]() f(X), X
f(X), X![]() G.
G.
Затем
проверяют, не существует ли какой-нибудь
очевидный способ нахождения точки X0,
для которой f(X0)=![]() 0.
Если он есть, то искомый максимум найден.
0.
Если он есть, то искомый максимум найден.
Если
такого способа нет, то множество G
разбивают
на подмножества G1
и G2
и для
каждого из них находят верхнюю границу
![]() 1
и
1
и
![]() 2
(при этом
2
(при этом
![]() 0
0![]()
![]() 1
и
1
и
![]() 0
0![]()
![]() 2).
Далее оптимальный план ищут в наиболее
перспективном множестве, т.е. в том,
которому соответствует наибольшая
оценка.
2).
Далее оптимальный план ищут в наиболее
перспективном множестве, т.е. в том,
которому соответствует наибольшая
оценка.
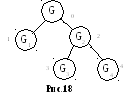
Этот процесс может быть изображен в виде дерева (рис.18). На каждом шаге процесса делается попытка найти точку Х в соответствующем подмножестве, на которой реализуется его верхняя граница. Если попытка не удается, то ветвление продолжают, рассматривая каждый раз наиболее перспективное подмножество (для его выбора сравнивают оценки вершин дерева, из которых нет выходов).
Если
попытка найти Х:
f(X) =![]() k
удалась,
то это будет оптимальный план для всего
исходного множества G
(поскольку
для остальных подмножеств верхние
границы заведомо меньше).
k
удалась,
то это будет оптимальный план для всего
исходного множества G
(поскольку
для остальных подмножеств верхние
границы заведомо меньше).
При решении задачи на минимум схема та же, но рассматриваются вершины с наименьшей оценкой.
Этот метод всегда сходится, если мы имеем дело с ограниченной дискретной областью.
Чтобы конкретизировать метод ветвей и границ, необходимо установить:
алгоритм поиска границ
 ;
;алгоритм разбиения множества на части;
алгоритм поиска Х, реализующего границу
 ;
;сходимость метода.
3.4. Применение метода ветвей и границ к решению задач линейного целочисленного программирования
Рассмотрим задачу ЦЛП в матричной форме записи. Обозначим ОДП этой задачи D, а ОДП ЗЛП без ограничений целочисленности - G. Точно так же обозначим соответствующие системы ограничений, а сами задачи будем называть D-задача и G-задача.
max CX
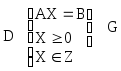
D представляет собой часть G.
G
будем рассматривать в качестве исходного
множества (рис.19).
представляет собой часть G.
G
будем рассматривать в качестве исходного
множества (рис.19).
Решим
вначале G-задачу.
Пусть при решении этой задачи получен
оптимальный план ХG.
Значение целевой функции на нем zG
- оптимум G-задачи
- будем использовать в качестве границы
![]() .
В самом деле,
.
В самом деле,
zG
![]() СХ
СХ![]() Х
Х![]() G;
G;
zG
![]() СХ
СХ![]() Х
Х![]() D.
D.
Если план ХG целочисленный, то решение задачи окончено. Таким образом, мы ответили на первый и третий вопросы, конкретизирующие метод ветвей и границ.
Предположим,
что хотя бы одна компонента ХG
не целочисленна: хGi![]() Z.
Z.
Целой частью числа называют наибольшее целое число, меньшее или равное данному.
Обозначим целую часть числа хGi [хGi].
Конкретизируем второй вопрос.
Разобьем D на D1 и D2 следующим образом:
D1={X![]() D:
хi
D:
хi![]() [хGi]};
[хGi]};
D2={X![]() D:
хi
D:
хi![]() [хGi]
+ 1}
[хGi]
+ 1}
(т.е. к одному множеству отнесли все допустимые планы, у которых i-я компонента не больше целой части хGi, а к другому - у которых не меньше следующего целого числа).
Разбивая D, мы одновременно разбиваем и G (рис.20).
Это разбиение обладает следующими свойствами:
G 1
1![]() G2
G2
![]() G
(объединение этих множеств содержится
в G,
но не равно ему);
G
(объединение этих множеств содержится
в G,
но не равно ему);
D 1
1![]() D2
= D
(в устраненном «коридоре» нет ни одной
точки с целочисленными координатами).
D2
= D
(в устраненном «коридоре» нет ни одной
точки с целочисленными координатами).
При этом устраняется и план ХG.
Далее решение задачи продолжается для каждого из подмножеств G1 и G2.
Сходимость алгоритма основана на том, что в ограниченной ОДП множество дискретных точек конечно.
Следует отметить, что метод ветвей и границ легко обобщается и на частично целочисленные задачи (в качестве переменной, по которой разбивается множество, выбирают одну из тех, на которые наложены ограничения целочисленности).
3.5. Пример решения задачи целочисленного линейного программирования методом ветвей и границ
Требуется решить следующую задачу:
max 2х1 + х2
5 х1
+ 2х2
х1
+ 2х2![]() 10
10
3х1
+ 8х2![]() 13
13
х1,2![]() 0
0
х1,2![]() Z
Z
В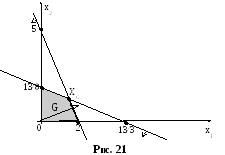 начале
решим эту задачу графически без
ограничений целочисленности. Решение
может быть найдено как симплекс-методом,
так и графически. Найдем его графически
(рис.21).
начале
решим эту задачу графически без
ограничений целочисленности. Решение
может быть найдено как симплекс-методом,
так и графически. Найдем его графически
(рис.21).
Координаты точки оптимума можно найти, решив систему уравнений:
5

 х1
+ 2х2
= 10 х1=27/17
х1
+ 2х2
= 10 х1=27/17
3х1 + 8х2 = 13 х2=35/34
ХG = (27/17;35/34), zG=143/34.
Начнем строить дерево, первая вершина которого будет соответствовать всей ОДП нецелочисленной задачи (G), а ее оценка будет равна zG (рис.22).
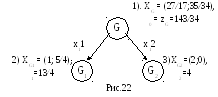
Полученный
план не является целочисленным, поэтому
возьмем его произвольную нецелочисленную
компоненту, например, первую (х1![]() Z;
[х1]
= [27/17]
= 1) и разобьем ОДП на две части следующим
образом:
Z;
[х1]
= [27/17]
= 1) и разобьем ОДП на две части следующим
образом:
G1
= {X![]() G:
х1
G:
х1![]() 1};
1};
G2
= {X![]() G:
х1
G:
х1![]() 2}.
2}.
Изобразим это графически (рис.23).
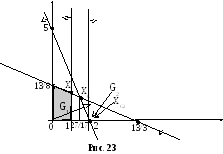
Из
рис.6 видно, что G2
представляет
собой одну точку ХG2=(2;0),
следовательно, на этом множестве оптимум
задачи равен 4 (![]() 2=4).
2=4).
План ХG2 является целочисленным, следовательно, решение целочисленной задачи уже, возможно, найдено. Однако, следует еще найти оценку множества G1. Она может оказаться не менее 4 (но обязательно не более 143/34). Если это так, то нужно проверить, не является ли целочисленным решение задачи на G1. Если оно целое, то является решением задачи, а если нет, то процесс решения необходимо продолжить, разбивая G1.
Н
 аG1
точку
оптимума можно найти, решив систему
уравнений:
аG1
точку
оптимума можно найти, решив систему
уравнений:
х 1
= 1 х1=1
1
= 1 х1=1
3х1 + 8х2 = 13 х2=5/4
ХG1 = (1; 5/4), zG1=13/4.
Оценка меньше 4, следовательно, решением задачи является Х*=ХG2=(2;0), z*=4.
Для задачи с булевыми переменными алгоритм метода ветвей и границ будет тот же, но разбиение проводится по первой по счету переменной, значение которой не равно 0 или 1. На одном подмножестве эта переменная приравнивается 1 (эта ветвь рассматривается вначале), а на другом - нулю.
Следует отметить, что для таких задач разработан более эффективный алгоритм решения (так называемый аддитивный), также основанный на методе ветвей и границ. В нем обычно требуется меньшее число итераций, а кроме того, и расчеты на каждой итерации являются менее трудоемкими, не требуют применения симплекс-метода.