

Эквивалентная схема мсп
Вынужденные колебания механических систем описываются дифференциальным уравнением второго порядка
![]()
где: F – вынуждающая сила; m – колеблющаяся масса; rm – сопротивление активных механических потерь; zc – комплексное сопротивление обрабатываемой среды; Сm – упругость (гибкость) системы.
А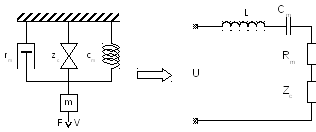 нализируемая
механическая система имеет вид,
приведенный на рисунке. Для анализа
таких систем удобно применять метод
электро-механических аналогий, основанный
на замене механических составляющих
системы их электрическими аналогами,
составлении эквивалентной схемы и
анализа ее методом пассивных
четырехполюсников.
нализируемая
механическая система имеет вид,
приведенный на рисунке. Для анализа
таких систем удобно применять метод
электро-механических аналогий, основанный
на замене механических составляющих
системы их электрическими аналогами,
составлении эквивалентной схемы и
анализа ее методом пассивных
четырехполюсников.
Метод электро-механических аналогий
F→U; V→i; m→L; rm→Rm; zc→Zc, cm→Cm.
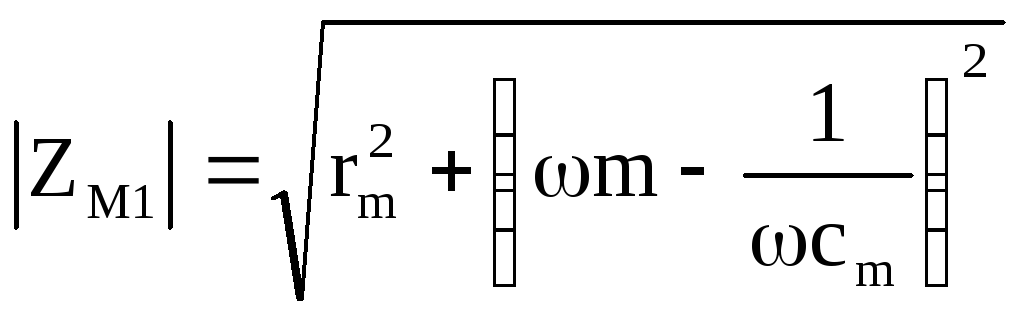
Полное комплексное механическое сопротивление
![]()
где: m; rm; cm – const,
zc – var.
-
zc=0 – холостой ход.
![]() ,
,
где:
 -
модуль сопротивления,
-
модуль сопротивления,
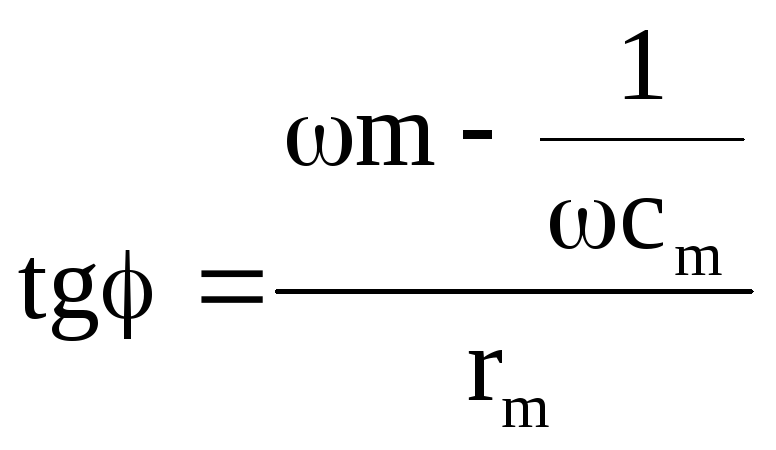 - фаза.
- фаза.
Резонансная частота механической системы
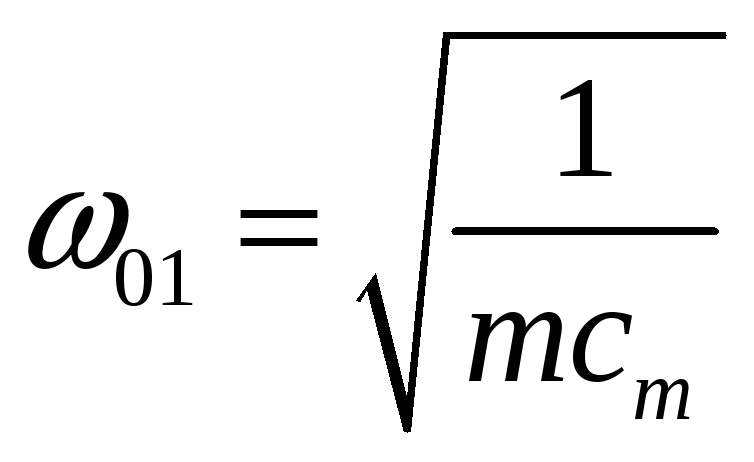 .
.
При ω=ω01 имеет место чисто активное сопротивление ZM1=rm,
так как
![]() .
.
-
zc≠0 - нагруженный режим обработки (вся энергия распределяется между rm и zc).
Подключение комплексной нагрузки приводит:
а) активная составляющая – к снижению добротности колебательного контура
![]() ,
,
где: Δω0,707 – полоса пропускания контура на уровне 0,707;
rc – активная составляющая комплексного сопротивления среды.
б) реактивная составляющая – к изменению резонансной частоты колебательной системы
![]()
![]() ,
,
где: хс – реактивная составляющая.
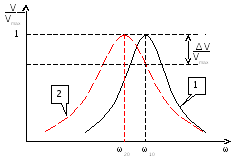
Если при этом частота вынуждающих колебаний осталась неизменной (ω=ω10 ), то:
-
Уменьшается колебательная скорость на ΔV/Vmax и амплитуда колебаний.
-
Колебательная система приобретает характер реактивной нагрузки, т.к.
![]() ,
,
при этом:
- уменьшается коэффициент мощности Cosφ;
- возрастают потери и снижается КПД.
Так как второй случай является типичным для нагруженного режима работы УЗ инструмента, необходимо изменить частоту вынуждающих колебаний до значения ω20 и в дальнейшем поддерживать это значение.
Учет и компенсация электрических параметров УЗИ
Дополнительно необходимо учитывать:
- влияние электрических параметров обмотки возбуждения (индуктивность Lэ и активное сопротивление Rэ≈0);
- потери на вихревые токи (сопротивление Rп).
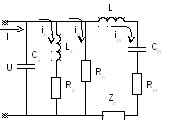
Для компенсации влияния индуктивности
обмотки в цепь вводят емкость Ск, которая вместе с Lэ и Rэ образуют параллельный колебательный контур.
Значение Ск выбирают из условия возникновения резонанса в контуре на частоте ω0, при котором
![]() .
.
В результате получают
![]() .
.
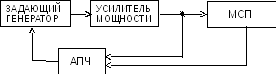
Структурная схема УЗ генератора
Представлена на рисунке.
Задающий генератор выполняется по любой известной схеме автоколебательного генератора, синусоидального или релаксационного. Усилитель мощности – двухтактный выходной каскад. Если выходная мощность не велика, можно совместить ЗГ и УМ в одном каскаде.
Для поддержания частоты колебаний на резонансной частоте колебательной системы введена ОС – автоматическая подстройка частоты (АПЧ).
Принцип любой АПЧ состоит в том, что в схеме поддерживается максимальное или минимальное значение какого либо параметра. Это могут быть:
- ток;
ток;
- напряжение;
- смещение;
- скорость;
- ускорение.
СХЕМА АПЧ С ОБРАТНОЙ СВЯЗЬЮ ПО ТОКУ
В этой схеме контролируется и поддерживается на максимальном уровне значение тока, протекающего по обмотке МСП. Ток, протекая по первичной обмотке Тр3 наводит во вторичной обмотке напряжение ОС (Uoc), которое затем через фазо-корректирующий контур поступает на базу входного транзистора задающего генератора, обеспечивая колебания на частоте резонанса.
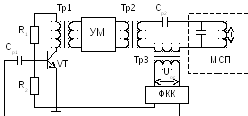
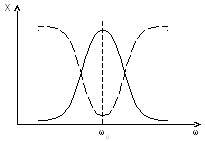
СХЕМА АПЧ С РЕЗОНАНСНЫМ ДАТЧИКОМ
Сердечник МСИ, состоящий из двух пакетов с обмотками (излучатель), дополняется третьим пакетом (датчик) с обмоткой, который имеет такую же резонансную характеристику, что и пакеты излучателя. При этом они имеют жесткую механическую связь с входным торцом концентратора. Механические колебания, возбуждаемые пакетами излучателя, приводят к механическим деформациям пакета датчика, в обмотке которого за счет обратного магнитострикционного эффекта наводится эдс обратной связи, поступающее далее на управляющий элемент ЗГ.
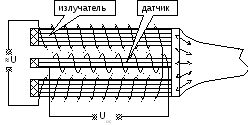
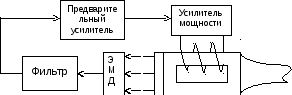
СХЕМА АПЧ С ШИРОКОПОЛОСНЫМ АКУСТИЧЕСКИМ ДАТЧИКОМ
Звуковые колебания, излучаемые с нерабочего торца МСП воспринимаются широполосным акустическим датчиком (микрофоном) и преобразуются в напряжение ОС. Для предотвращения возбуждения колебаний частотах гармоник в цепь установлен полосовой фильтр, настроенный на частоту, близкую к резонансной. Далее напряжение ОС поступает на предварительный усилитель (ЗГ) и тд.
ФРИ-ТАЙМОВЫЙ" МЕТОД АПЧ
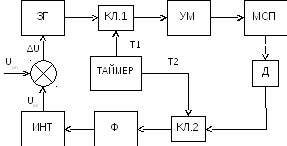
ΔU=Uоп- Uoc
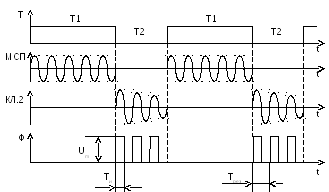
Uoc=UmTи/Трез=UmТиfрез
ΔU=Uоп- UmТиfрез