

Ответы Яблочников
.pdf9. Для чего используется moldex project
Moldex Project это модуль, так называемого, решателя, а так же обработки результатов. Предназначен для осуществления расчётов и обработки результатов анализа.
10. Сущность метода конечных элементов. Ответ
Метод конечных элементов (МКЭ) основной метод современной механики, лежащий в основе подавляющего большинства современных программных комплексов, предназначенных для выполнения расчетов различных конструкций на ПК.
Но диапазон его применения чрезвычайно широк: машиностроение, гидро и аэродинамика, горное дело и новейшая техника, а также различные задачи математической физики – теплопроводности, фильтрации, распространения волн и т. д Суть метода заключается в том, что область (одно , двух или трехмерная),
занимаемая конструкцией, разбивается на некоторое число малых, но конечных по размерам подобластей. Последние носят название конечных элементов (КЭ), а сам процесс разбивки – дискретизацией.
В зависимости от типа конструкции и характера ее деформации КЭ могут иметь различную форму. Так, при расчете стержневых систем (фермы, балки, рамы) КЭ представляют собой участки стержней; для двумерных континуальных конструкций (пластины, плиты, оболочки) чаще всего применяют треугольные и прямоугольные (плоские или изогнутые) КЭ; а для трехмерных областей (толстые плиты, массивы) – КЭ в форме тетраэдра или параллелепипеда. В отличие от реального сооружения в дискретной модели конечные элементы связываются между собой только в отдельных точках (узлах) определенным конечным числом узловых параметров.

11. Порядок решения задачи анализа напряженнодеформированного состояния конструкции с помощью метода конечных элементов (на примере программного комплекса OOFELIE).
Ответ
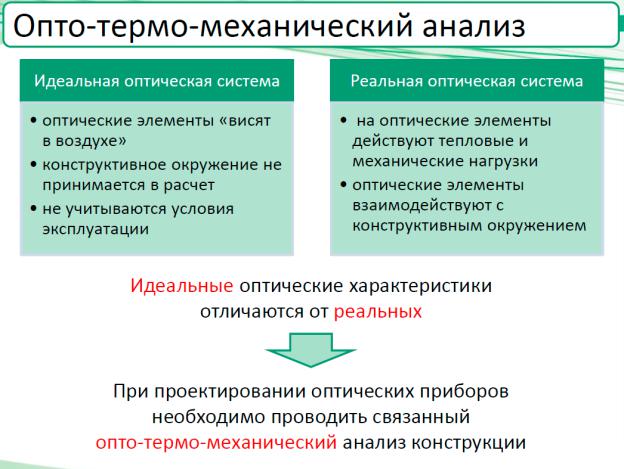
12. Применение численных методов в проектировании оптических приборов. Ответ
13. Применение численных методов в проектировании гидроакустических преобразователей и антенн.
Пьезоэлектрические элементы являются источниками звуковых колебаний в гидроакустических и преобразователях и антеннах.
Определение частотных характеристик гидроакустических преобразователей является сложной междисциплинарной задачей, требующей связанного решения задач механики с учетом пьезоэффекта и моделирования бесконечной акустической среды. Офелия позволяет решить эту задачу, эффективно используя вычислительные ресурсы за счет совместного использования метода конечных и метода граничных элементов.
14. Применение численных методов в проектировании МЭМС. Ответ
Особенность МЭМСкомпонентов состоит в чрезвычайно малых расстояниях между проводниками, несущими сигнал, в необходимости тщательного учета механических и электрофизических свойств используемых материалов, в теснейшей связи трехмерной конструкции с технологическими возможностями ее изготовления, в необходимости учета множества параметров электродинамического взаимодействия близко расположенных узлов и проводников. Поэтому роль специализированного программного обеспечения средств разработки МЭМСузлов нельзя недооценивать.
Наиболее известные программные пакеты проектирования МЭМСустройств поддерживают анализ электростатических эффектов в двух и трехмерной неоднородной среде с потерями, расчет термомеханических параметров и переходных процессов с учетом гистерезиса, тепловых деформаций, упругих эффектов; эффектов, связанных с упаковкой изделия в корпус; перерасчет явлений от уровня электромагнитных полей до уровня искажений формы сигналов и обратно, а также трехмерный электродинамический анализ полей в неоднородной среде с потерями. В пакеты обычно входит модуль разработки структурных и принципиальных схем с использованием поведенческих моделей электромеханических устройств, а также типовых радиоэлементов. Разумеется, необходимы также библиотеки параметров материалов; редакторы послойного описания топологии двумерных подистем и объединения их в трехмерную структуру; эмулятор доступных технологических процессов с вводом множества его параметров; модуль визуализации результатов.
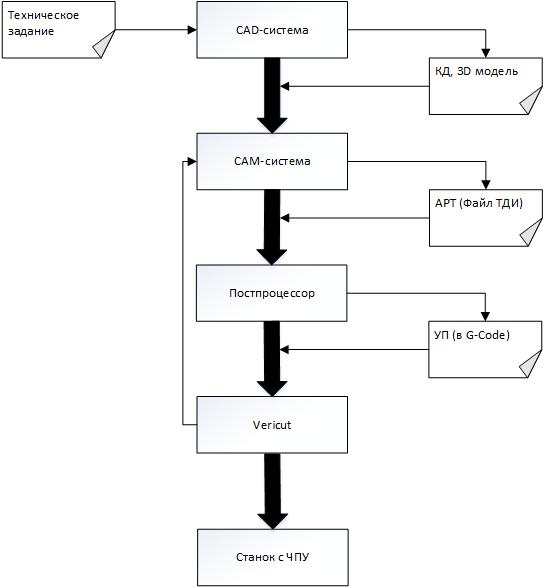
15. Схематично нарисовать схему ТП с использованием станков с ЧПУ. Ответ
16. Что такое постпроцессор и для чего он нужен?
Постпроцессор это модуль, преобразующий файл траектории движения инструмента и технологических команд, рассчитанный процессором CAM или CAD/CAMсистемы, в файл управляющей программы в строгом соответствии с требованиями методики ручного программирования конкретного комплекса "станоксистема с ЧПУ". Постпроцессор выполняет немалое количество функций, например:
кодирует линейные перемещения сообразно цене импульса;
выполняет линейную или круговую интерполяцию перемещений по дуге окружности, а также кодирует их в импульсах;
рассчитывает динамику перемещений, отслеживая и, если нужно, уменьшая слишком большую подачу на малом перемещении("станок не успеет разогнаться");
автоматически выдает в кадр вектора или функции коррекции на радиус инструмента;
строит текущий кадр по шаблону, автоматически нумеруя кадры под адресом N;
превращает подачи, назначенные технологом, в конкретный набор символов с адресом F и выдает в нужное место кадра.
оформляет как начало, так и конец УП, а также структуру кадра.
Типы постпроцессоров:
обобщенные
универсальные
инвариантные
17. Основные возможности системы VERICUT? Роль и место системы VERICUT в ТПП?
Ответ
Функциональные возможности программного комплекса Vericut позволяют:
●полностью моделировать работу механизмов станка с любым уровнем детализации.
Программа использует те же логические устройства и данные, что и ваши станки. Следовательно, то, что вы видите на экране, произойдет и при работе на станке;
●проводить сравнительный анализ обработанной заготовки с оригинальной конструкторской моделью. Получив результаты обработки детали, вы можете сравнить их с данными проекта;
●оптимизировать скоростные режимы обработки. Оптимальные режимы резания обеспечивают наиболее производительные движения режущего инструмента, меньший его износ и лучшее качество обработки;
●экспортировать модель обработанной заготовки в CADсистему. После завершения виртуального процесса обработки модель полученной детали передается в системы моделирования (CADсистемы) для использования s процессе проектирования.
Vericut позволяет обнаружить и устранить ошибки уже на этапе проектирования обработки детали, а значит обезопасить себя от повреждения изготавливаемой детали, крепежной оснастки или инструмента. И всё это — до начала работы непосредственно на станке.
VERICUT позволяет:
●Предотвращать аварии и простои станков с ЧПУ
●Сокращать сроки внедрения нового оборудования
●Наглядно показывать результат работы управляющей программы
●Повышать эффективность процесса обработки
●Повышать безопасность работы на станке
●Повышать качество создаваемой документации
●Обучать программиста и оператора, не занимая станок и без риска аварий
http://open.ifmo.ru/images/4/46/19221_srs1_3.pdf
http://csoft.com.ua/catalog/item/id/161
18. Объяснить различие между написанием УП в абсолютном режиме и режиме приращений. Круговая и линейная интерполяция, обозначения в GCODE Ответ
G90 – режим абсолютного позиционирования. В режиме абсолютного позиционирования G90 перемещения исполнительных органов производятся относительно нулевой точки станка или относительно нулевой точки рабочей системы координат G54–G59. Код G90 является модальным и отменяется при помощи кода относительного позиционирования G91.
G91 – режим относительного позиционирования. При помощи кода G91 активируется режим относительного (инкрементального) позиционирования. При относительном способе отсчета за нулевое положение каждый раз принимается положение исполнительного органа, которое он занимал перед началом перемещения к следующей опорной точке. Код G91 является модальным и отменяется при помощи кода абсолютного позиционирования G90.
G01 – линейная интерполяция. Код G01 – команда линейной интерполяции, обеспечивающая перемещение инструмента по прямой линии с заданной скоростью. Скорость перемещения указывается Fадресом. Код G01 отменяется с помощью кодов G00, G02HG03.
G02 – круговая интерполяция (дуга в направлении часовой стрелки). Код G02 предназначен для выполнения круговой интерполяции, то есть для перемещения инструмента по дуге (окружности) в направлении часовой стрелки с заданной скоростью. Скорость перемещения указывается Fадресом. Код G02 отменяется с помощью кодов G00, G01 и G03.
G03 – круговая интерполяция (дуга против часовой стрелки). Код G03 предназначен для выполнения круговой интерполяции, то есть для перемещения инструмента по дуге (окружности) против часовой стрелки с заданной скоростью. Скорость перемещения указывается Fадресом. Код G03 отменяется с помощью кодов G00, G01 и G02.