

fizika_test
.docxВариант 1
1. Углова́я ско́рость — векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
W= df/dt
Угловое ускорение - векторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
Угловое ускорение равно первой производной от угловой скорости по времени.
2. В замкнутой системе геометрическая сумма импульсов тел остается постоянной при любых взаимодействиях тел этой системы между собой.
3. Момент силы — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Уравнение моментов: момент инерции твердого тела, умноженный на вторую производную от угла (угловое ускорени) равен сумме моментов сил, действующих на тело.
4. Теоре́ма Штейнера: момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела m на квадрат расстояния d между осями:
J=Jc+md*d
Где Jc — известный момент инерции относительно оси, проходящей через центр масс тела,
J — искомый момент инерции относительно параллельной оси,
m — масса тела,
d — расстояние между указанными осями.
5.
![]() ,
где
,
где![]()
__________________________________________
Вариант 2
1. Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины, направления силы (сил) и от перемещения точки (точек) тела или системы. A=FS
Мо́щность — физическая
величина,
равная в общем случае скорости изменения
энергии системы. В более узком смысле
мощность равна отношениюработы,
выполняемой за некоторый промежуток
времени, к этому промежутку времени.
![]()
Интеграл от мгновенной мощности за промежуток времени равен полной переданной энергии за это время:
![]()
2.
![]() В
зависимости от величины коэффициента
затухания решение разделяется на три
возможных варианта.. Апериодичность
В
зависимости от величины коэффициента
затухания решение разделяется на три
возможных варианта.. Апериодичность
Если ![]() ,
то имеется два действительных корня,
и решение дифференциального уравнения
принимает вид:
,
то имеется два действительных корня,
и решение дифференциального уравнения
принимает вид:
![]() .В
этом случае колебания с самого начала
экспоненциально затухают.
.В
этом случае колебания с самого начала
экспоненциально затухают.
Граница апериодичности
Если ![]() ,
два действительных корня совпадают
,
два действительных корня совпадают ![]() ,
и решением уравнения является:
,
и решением уравнения является:
![]()
В данном случае может иметь место вре́менный рост, но потом — экспоненциальное затухание.. Слабое затухание
Если ![]() ,
то решением характеристического
уравнения являются два комплексно
сопряжённых корня
,
то решением характеристического
уравнения являются два комплексно
сопряжённых корня![]()
3.декремент затухания (от лат. decrementum - уменьшение, убыль) (логарифмический декремент затухания) - количественная характеристика быстроты затухания колебаний в линейной системе; представляет собой натуральный логарифм отношения двух последующих максимальных отклонений колеблющейся величины в одну и ту же сторону.
![]()
4. Моментом инерции твердого тела относительно оси называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до оси.
5.
Вариант 3
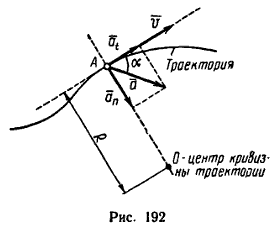
1.Быстрота изменения модуля скорости характеризуется касательным (тангенсальным) ускорением at – составляющей полного ускорения a, направленной по касательной к траектории (см. рис. 192).
Числовое значение касательного ускорения в общем случае определяется по формуле at = dv/dt или at = f''(t).
Быстрота изменения направления скорости характеризуется центростремительным (нормальным) ускорением an – составляющей полного ускорения a, направленного по нормали к траектории в сторону центра кривизны.
Числовое значение
нормального ускорения определяется
в общем случае по формуле
an =
v2/R,
где
v – модуль скорости точки в данный
момент;
R
– радиус кривизны траектории в месте,
где находится точка в данный момент.
2. В замкнутой системе геометрическая сумма импульсов тел остается постоянной при любых взаимодействиях тел этой системы между собой.
3. Потенциальная энергия — скалярная физическая величина, характеризующая способность некого тела (или материальной точки) совершать работу за счет своего нахождения в поле действия сил.
![]()
4.
![]()
В зависимости от разности фаз (φ2-φ1):
1) (φ2-φ1) = ±2mπ (m=0, 1, 2, …), тогда A= А1+А2, т. е. амплитуда результирующего колебания А равна сумме амплитуд складываемых колебаний;
2) (φ2-φ1) = ±(2m+1)π (m=0, 1, 2, …), тогда A= |А1-А2|, т. е. амплитуда результирующего колебания равна разности амплитуд складываемых колебаний
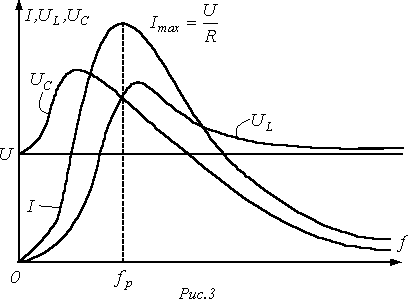
5. Резона́нс (фр. resonance, от лат. resono — откликаюсь) — явление резкого возрастания амплитуды вынужденных колебаний, которое наступает при приближении частоты внешнего воздействия к некоторым значениям (резонансным частотам), определяемым свойствами системы. Увеличение амплитуды — это лишь следствие резонанса, а причина — совпадение внешней (возбуждающей) частоты с внутренней (собственной) частотой колебательной системы.
 ___________________________________________
___________________________________________
Вариант 4.
1а. Неинерциа́льная систе́ма отсчёта — система отсчёта, к которой не применим закон инерции (говорящий о том, что каждое тело, в отсутствие действующих на него сил, движется по прямой и с постоянной скоростью), и поэтому для согласования сил и ускорений в которой приходится вводить фиктивные силы инерции.
1б.
![]()
2. сухое, когда взаимодействующие твёрдые тела не разделены никакими дополнительными слоями/смазками (в том числе и твердыми смазочными материалами) — очень редко встречающийся на практике случай. Характерная отличительная черта сухого трения — наличие значительной силы трения покоя;жидкостное (вязкое), при взаимодействии тел, разделённых слоем твёрдого тела (порошком графита), жидкости или газа (смазки) различной толщины — как правило, встречается при трении качения, когда твёрдые тела погружены в жидкость, величина вязкого трения характеризуется вязкостью среды;
3. геометрическая точка, характеризующая движение тела или системы частиц как целого
Положение центра масс (центра инерции) системы материальных точек в классической механике определяется следующим образом:
![]()
Где
![]() — радиус-вектор центра
масс,
— радиус-вектор центра
масс,
![]() —
радиус-вектор i-й
точки системы,
—
радиус-вектор i-й
точки системы,
![]() — масса i-й
точки.
— масса i-й
точки.
4.
![]()
.5. Решение одномерного волнового уравнения
![]() (функция
(функция ![]() соответствует
вынуждающей внешней силе)
соответствует
вынуждающей внешней силе)
с начальными условиями
![]()
имеет вид
![]()