

10.5. Разделение на подсистемы и разделение
УРАВНЕНИЙ
Разделение на подсистемы эффективно используется при расчетах установившихся режимов сложных электри- ческих систем. Идея такого разделения состоит в том, что- бы рассчитать режим систем по частям. Методы расчета по частям, получившие название диакоптики, описаны в ра- ботах Г. Крона. У нас в стране методам разделения на подсистемы также уделяется значительное внимание [21].
При разделении на подсистемы раздельно рассчитыва- ется режим в каждой подсистеме и, кроме того, определя- ются «граничные» переменные, т. е. параметры режима граничных линий или узлов, которые принадлежат к двум или более подсистемам. Способы разделения на подсисте- мы могут быть различны, выбирать наиболее эффективное разделение на подсистемы можно с помощью ЭВМ.
Как при разделении на подсистемы, так и при эквива- лентировании фактически матрица Yу представляется в блочной форме, т.е. разделенная на подматрицы. Расчет режима требует операций лишь с этими подматрицами, но не с полной матрицей. Разделение на подсистемы осуще- ствляется так, что большинство подматриц состоит из ну- лей. Например, разделение на подсистемы целесообразно осуществить так, чтобы подматрица YI II=YII I в выраже- нии (10.13) состояла только из нулей. В этом случае выра- жения (10.14) существенно упрощаются и можно незави- симо рассчитывать подсистемы I и II. Такое разделение возможно лишь в частном случае, когда две подсистемы не связаны друг с другом, но питаются от одного балансирую- щего узла (рис. 10.11, а и б). В более сложных случаях под- системы связаны друг с другом через граничные ветви или узлы (рис. 10. 11, д и е).
Покажем, что при разделении сети на рис. 10.11, а на подсистемы I и II (рис. 10.11,б) матрица присоединения сети приводится к блочно-диагональной форме. Матрицей в блочно-диагональной форме называют такую, которая со- стоит из матриц-клеток (или блоков), расположенных по диагонали. Разделим схему соединения на две изолирован- ные подсистемы (рис. 10.11,б). Для этого разделим схему по узлу 7. Этот узел называется граничным. Пронумеруем вначале в произвольном порядке узлы первой подсистемы (кроме граничного узла), а затем узлы второй подсистемы. Граничные узлы нумеруются в последнюю очередь. На рис. 10.11, в приведена матрица присоединения узлов в блочно-диагональной форме. Здесь ненулевые элементы
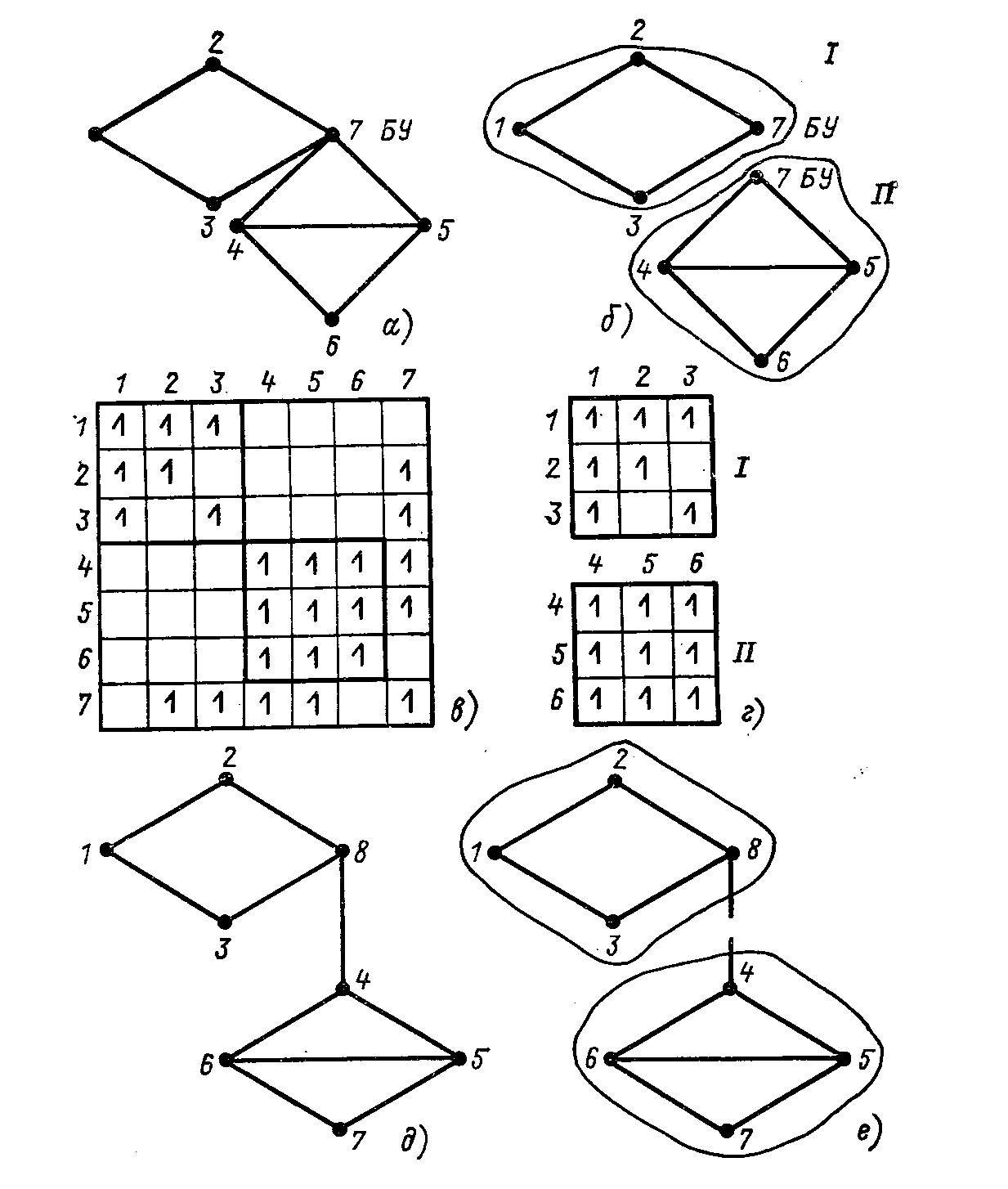
Рис. 10.11. Разделение на подсистемы, приводящее матрицу присоединения узлов к блочно-диагональной форме:
а - граф сети; б - разделение на подсистемы: в - матрица присоединения исход- ной сети; г - матрицы присоединения подсистем: д - подсистемы, соединенные граничной ветвью: е - разделение этих подсистем
матрицы присоединения сгруппированы в отдельные квад- ратные матрицы-клетки (блоки), расположенные вдоль диагонали. Они окаймляются ненулевыми элементами, не вошедшими в эти клетки (для схемы на рис. 10.11, а это элементы, соответствующие связям узла 7 со всеми осталь- ными узлами). Решение системы уравнений с такой матри- цей можно свести к независимому решению подсистем I и II

Рис. 10.12. Разделение на три подсистемы, приводящие матрицу присое- динения к блочно-диагональной форме:
а - исходная сеть; б - три подсистемы; в - матрица присоединения
(рис, 10.11, г), которым соответствуют матрицы-клетки, расположенные вдоль главной диагонали. Очевидно, что решать две независимые системы уравнений 3-го порядка для подсистем I и II проще, чем систему 6-го порядка для исходной сети.
На рис. 10.11, д, е и 10.12 приведены более сложные случаи. На рис. 10. 11, д, е подсистемы I, II соединены гра- ничной ветвью 48. Сеть на рис. 10.12, а можно разделить на три подсистемы- I, II, III (рис. 10,12,б). Граничный узел- 12, граничные ветви- 812 и 412. На рис. 10.12,в приведена матрица присоединения. Решение уравнений установившегося режима с такой матрицей можно свести к независимым решениям для подсистем I, II, III, которым соответствуют матрицы-клетки, расположенные вдоль глав- ной диагонали, и решению некоторой системы уравнений для узлов, не вошедших в эти системы (для узла 12 рис. 10.12,а).
Эта система уравнений называется граничной и получа- ется после исключения всех переменных клеточных под- систем из уравнений этих узлов. Такой способ нумерации узлов в литературе иногда называют разбивкой на естест- венные и искусственные подсистемы.
Основное отличие разделения на подсистемы от экви- валентирования состоит в следующем. При эквивалентиро- вании рассчитывается установившийся режим только экви- валентной системы. Напряжения исключенных узлов не определяются. При разделении на подсистемы определя- ются напряжения всех узлов электрической системы. Эф- фективность разделения на подсистемы состоит в том, что для каждой подсистемы решается меньшее количество уравнений с меньшим числом неизвестных, чем без такого разделения. Именно поэтому достигается экономия опера- тивной памяти ЭВМ, так как в оперативной памяти можно осуществлять расчет лишь для каждой подсистемы, запо- миная результаты этого расчета во внешней памяти. Та- кой путь позволяет увеличить объем рассчитываемых элек- трических систем и в ряде случаев уменьшить время рас- чета.
Кибернетическое (функциональное) моделирование при- меняется для повышения эффективности расчетов режи- мов за счет снижения размерности решаемой системы урав- нений [21]. При этом используются функциональные ха- рактеристики - зависимости одних переменных от других. Эти характеристики получают как с помощью исключения переменных, так и другими способами - методами наи- меньших квадратов, статистики и т. д. Функциональные ха- рактеристики - это способ функционального представле- ния, способ замены переменных при расчетах режимов. Ки- бернетическое моделирование приводит к разделению на подсистемы совместно с эквивалентированием в сочетании с использованием функциональных характеристик и с воз- можностью изменения алгоритмов расчета (видов эквива- лентирования, разделения на подсистемы и выбора харак- теристик).
Разделение
уравнений (раздельное решение),
связы-
вающих
активные мощности и фазы напряжений
(Р-
),
реактивные
мощности и модули напряжений
(Q-
U),
при-
меняется
для повышения эффективности метода
Ньютона.
Простейший
способ разделения уравнений состоит в
том,
что все
элементы недиагональных подматриц
![]() и
и
![]() в
методе Ньютона
(9.88)
принимаются равными нулю.
В
этом случае система линейных уравнений,
решаемых на
каждом
шаге метода Ньютона, разделяется на две
систе-
мы
уравнений порядка п.
Одна из них содержит только
параметры
Р-
,
другая
только Q-
U. Этот
вариант ме-
тода
Ньютона требует в
4 раза
меньшего объема памяти
для
матрицы Якоби
(в оперативной памяти ЭВМ хранится
только
одна из разделенных систем уравнений).
Фактиче-
ски
объем памяти будет составлять
35- 40 %,
объем вы-
числений
на один шаг на
10 % меньше,
чем для метода
Ньютона
без использования разделения.
в
методе Ньютона
(9.88)
принимаются равными нулю.
В
этом случае система линейных уравнений,
решаемых на
каждом
шаге метода Ньютона, разделяется на две
систе-
мы
уравнений порядка п.
Одна из них содержит только
параметры
Р-
,
другая
только Q-
U. Этот
вариант ме-
тода
Ньютона требует в
4 раза
меньшего объема памяти
для
матрицы Якоби
(в оперативной памяти ЭВМ хранится
только
одна из разделенных систем уравнений).
Фактиче-
ски
объем памяти будет составлять
35- 40 %,
объем вы-
числений
на один шаг на
10 % меньше,
чем для метода
Ньютона
без использования разделения.
Разработаны способы решения разделенных уравнений с постоянными матрицами. В этом случае время расчета на один шаг примерно в 5 раз меньше, чем для метода Ньютона без разделения, и в 1,5 раза больше, чем для ме- тода Зейделя. Методы с разделением при практически при- емлемой точности расчета больших систем требуют от двух до пяти шагов. Они дают хорошее приближение после од- ной или двух итераций. Конечно, их сходимость не быстрее, чем для метода Ньютона без разделения уравнений. При расчете близких к предельным режимов метод Ньютона с разделением может расходиться в тех случаях, когда ме- тод без разделения сходится. Таким образом, разделение может уменьшить надежность сходимости [19].
Матричные и топологические методы расчета устано- вившихся режимов электрических систем. Матричными иногда называют такие методы расчета, когда используют- ся операции с матрицами (сложение, умножение, обраще- ние и др.). При этом фактически предполагается использо- вание стандартных подпрограмм ЭВМ, реализующих опе- рации с матрицами. При расчете сложных электрических систем такие матричные методы не эффективны как с точки зрения требуемой памяти, так и с точки зрения времени расчетов на ЭВМ. Одна из основных причин- заполнен- ность обратных матриц (например, матрицы собственных и взаимных сопротивлений узлов). В то же время исполь- зование матриц весьма важно для компактной записи урав- нений установившегося режима, анализа и усовершенство- вания методов решения (в матричной форме) этих уравнений. Запись уравнений установившегося режима в матричной форме не предполагает обязательного исполь- зования операций с матрицами и в особенности трудоем- кой операции обращения. Для эффективного решения урав- нений установившегося режима необходим учет нулевых элементов в соответствующих матрицах.
Каждой электрической цепи можно поставить в соответ- ствие граф цепи. В литературе иногда использовалось по- нятие топологических методов расчета режимов или пара- метров систем (узловых сопротивлений, коэффициентов то- кораспределения и т. д.). Эти методы использовали теорию графов и возможность свести расчет к логическим опера- циям по определению деревьев графа сети. Расчет режима представляется при этом как последовательность операций или преобразований графа цепи. Расчет режима электри- ческой системы или определение ее параметров действи- тельно можно осуществить как результат такой последова- тельности логических преобразований графов. В то же вре- мя такие методы для расчетов установившихся режимов сложных электрических систем не нашли широкого приме- нения. В настоящее время необходимо указать на графы лишь как на средство наглядного представления топологи- ческих свойств систем уравнений со слабо заполненными матрицами. В соответствие каждой системе уравнений, ре- шаемых при расчете установившегося режима, можно по- ставить соответствующий граф. В частном случае это мо- жет быть граф электрической цепи. Использование теории графов позволяет более просто указать ряд дополнитель- ных возможностей при решении уравнений установивше- гося режима.
Вопросы для самопроверки
1. В чем состоит метод преобразования сети?
2. Какой метод учета слабой заполненности матрицы узловых проводимостей наиболее прост и эффективен при расчетах на ЭВМ?
3. Как производится эквивалентирование сети?
4. В чем состоят особенности разделения сети на подси- стемы и в чем отличие этого метода от эквивалентиро- вания?
5. В чем различие между расщеплением сети и разделе- нием уравнений установившегося режима?
ГЛАВА ОДИННАДЦАТАЯ
ОСОБЫЕ РЕЖИМЫ ЭЛЕКТРИЧЕСКИХ СИСТЕМ