

Векторные диаграммы
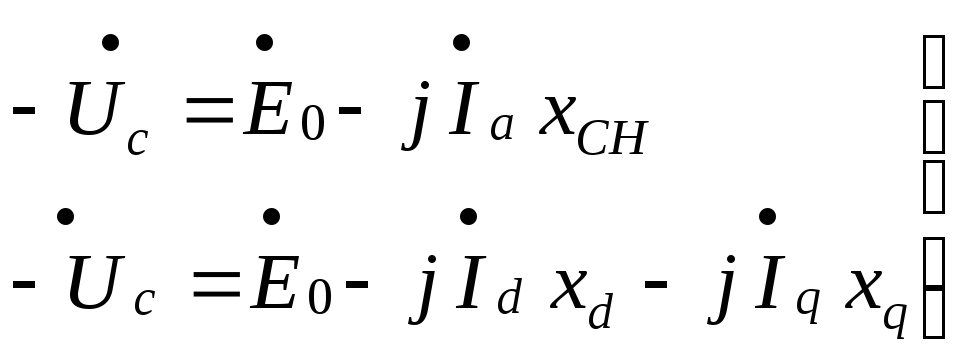
Основные комплексные уравнения для синхронных машин:
![]() -
для неявнополюсных
-
для неявнополюсных
![]() -
для явнополюсных
-
для явнополюсных
Для
СД в эти уравнения подставляем
![]() вместо
вместо![]() ,
т.к. термин «напряжение двигателей» не
употребляется
,
т.к. термин «напряжение двигателей» не
употребляется
-
Построение начинаем с изображения
вектора
![]() и
и![]() .
Затем строим вектор
.
Затем строим вектор![]() ,
активная составляющая которого совпадает
с направлением вектора
,
активная составляющая которого совпадает
с направлением вектора![]() и определяем вектор
и определяем вектор![]() .(Рис.
А)
.(Рис.
А)
-
Для явнополюсной машины (Рис. Б) сначала
определяем направление вектора
![]() прибавив к
прибавив к![]() вспомогательный вектор
вспомогательный вектор
![]() (ВД для СГ мы заменяем эквивалентной
неявнополюсной машиной у которой
синхронная индукция сопротивления по
обеим осям равна
(ВД для СГ мы заменяем эквивалентной
неявнополюсной машиной у которой
синхронная индукция сопротивления по
обеим осям равна
![]() явнополюсной машины, следовательно, у
этой машины
явнополюсной машины, следовательно, у
этой машины![]() имеет эквивалентную
имеет эквивалентную![]() у которой θ=const).
у которой θ=const).
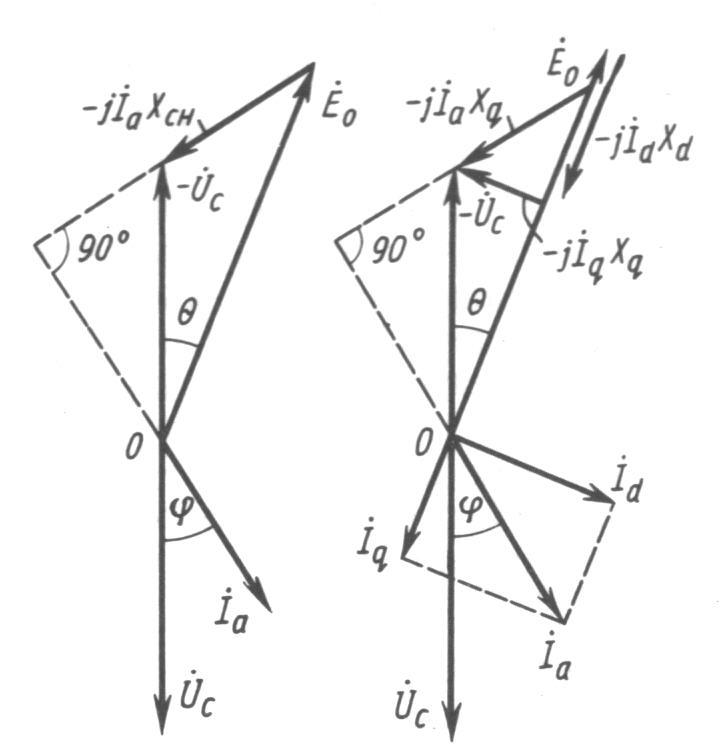
Рис. А Рис.Б
Работа СД при неизменном токе возбуждения.
Для определения свойств СД, рассмотрим его работу при изменении нагрузочного момента МВН и постоянном токе возбуждения. Для простоты пользуемся векторной диаграммой неявнополюсной машины.
Допустим,
двигатель работает при Cosφ=1,
чему на векторной диаграмме соответствует
![]() и θ1.
и θ1.
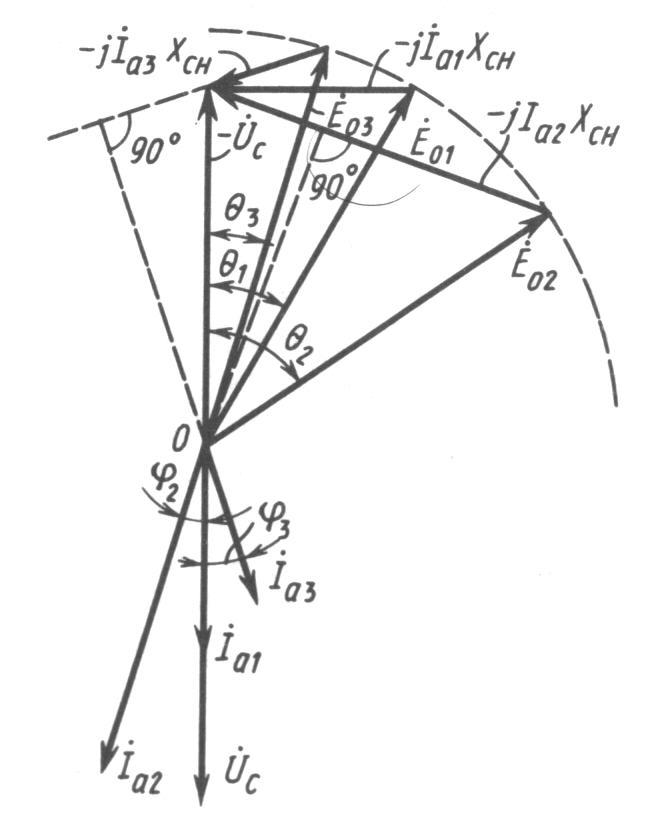
С
увеличением
нагрузки
увеличивается угол между
![]() и
и![]() до значения θ2,
т.к. вращающийся момент М= МВН
пропорционален
до значения θ2,
т.к. вращающийся момент М= МВН
пропорционален
![]() .
При этом конец
.
При этом конец![]() перемещается по окружностиR=E0
и при этих условиях (IB
– const,
E0–
const,
Uc–
const)
вектор тока
перемещается по окружностиR=E0
и при этих условиях (IB
– const,
E0–
const,
Uc–
const)
вектор тока
![]() так же поворачивается вокруг точки О,
располагаясь перпендикулярно вектору
так же поворачивается вокруг точки О,
располагаясь перпендикулярно вектору![]() .
Ток
.
Ток![]() двигателя имеетотстающую
реактивную составляющую.
двигателя имеетотстающую
реактивную составляющую.
Если
нагрузка
двигателя уменьшается,
то угол уменьшается с θ до θ3.
При этом ток
![]() двигателя имеетопережающую
реактивную составляющую.
двигателя имеетопережающую
реактивную составляющую.
Изменение активной мощности СД приводит к изменению его Cosφ - при уменьшении нагрузки вектор тока поворачивается в сторону опережения и двигатель может работать с Cosφ=1 или с опережающим током; при повышении нагрузки вектор тока поворачивается в сторону отставания.
Работа СД с неизменным моментом.
Если при неизменной активной мощности изменять IB, то будет изменяться только реактивная мощность, т.е. величина Cosφ. Векторная диаграмма для этого случая выглядит следующим образом:
Если
двигатель работает при Cosφ
=1, то этому режиму соответствует
![]() и
некоторый угол θ1.
и
некоторый угол θ1.
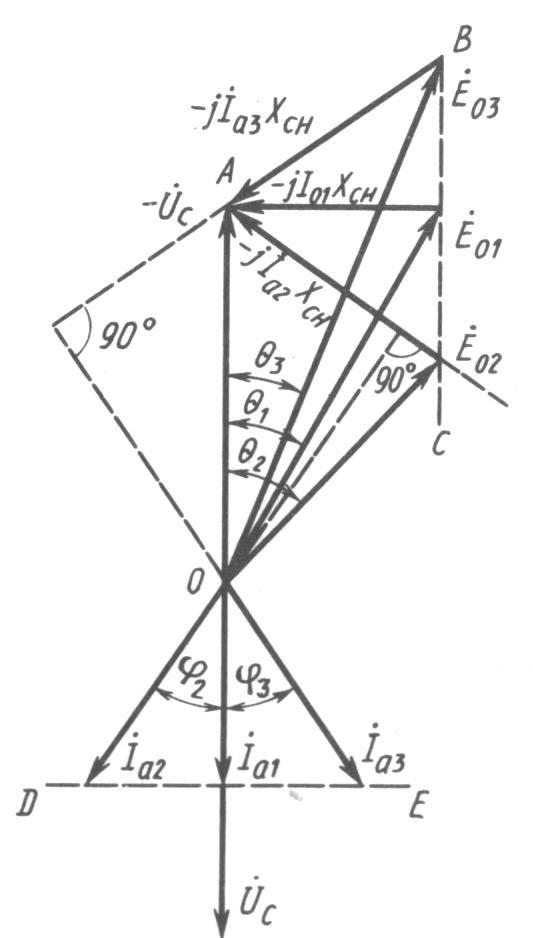
-
При уменьшении
IB
ЭДС Ео
снижается
до Е02.
Т.к. активная мощность остается неизменной
из условий
![]() получим, что
получим, что![]() ,
следовательно, конец вектора
,
следовательно, конец вектора![]() при изменении тока возбуждения
перемещается по прямойВС
параллельной вектору Uc
и проходящей через конец
при изменении тока возбуждения
перемещается по прямойВС
параллельной вектору Uc
и проходящей через конец
![]() ,
следовательно, угол θ2
> θ1.
,
следовательно, угол θ2
> θ1.
Аналогично
строим диаграмму при увеличении
IB.
Вектор
![]() возрастает
до
возрастает
до![]() и θ3<θ1.
Вектор
и θ3<θ1.
Вектор
![]() поворачивается вокруг точки А и
соответственно ему изменяет направление
вектор тока
поворачивается вокруг точки А и
соответственно ему изменяет направление
вектор тока![]() ,
перпендикулярный вектору -
,
перпендикулярный вектору -![]() ,
при этом из условия равенства активных
мощностей
,
при этом из условия равенства активных
мощностей![]() конец вектора
конец вектора![]() перемещается по прямойДЕ
перпендикулярной вектору
перемещается по прямойДЕ
перпендикулярной вектору
![]() .
.
По
этой диаграмме можно построить U-образные
характеристики для двигателя
![]() .
Они имеют тот же вид, что и для генераторов
с отличием в том, что угол сдвига фаз φ
отсчитывают от
.
Они имеют тот же вид, что и для генераторов
с отличием в том, что угол сдвига фаз φ
отсчитывают от![]() .
.
При перевозбуждении СД по отношению к сети является емкостью, т.е. отдает в сеть реактивную мощность, реакция якоря в СД - подмагничивающая.
Недовозбужденный двигатель потребляет из сети реактивную мощность, являясь по отношению к сети индуктивностью. Реакция якоря при перевозбуждении – размагничивающая.
На угловой характеристике область двигательного режима находится в зоне отрицательных углов θ.
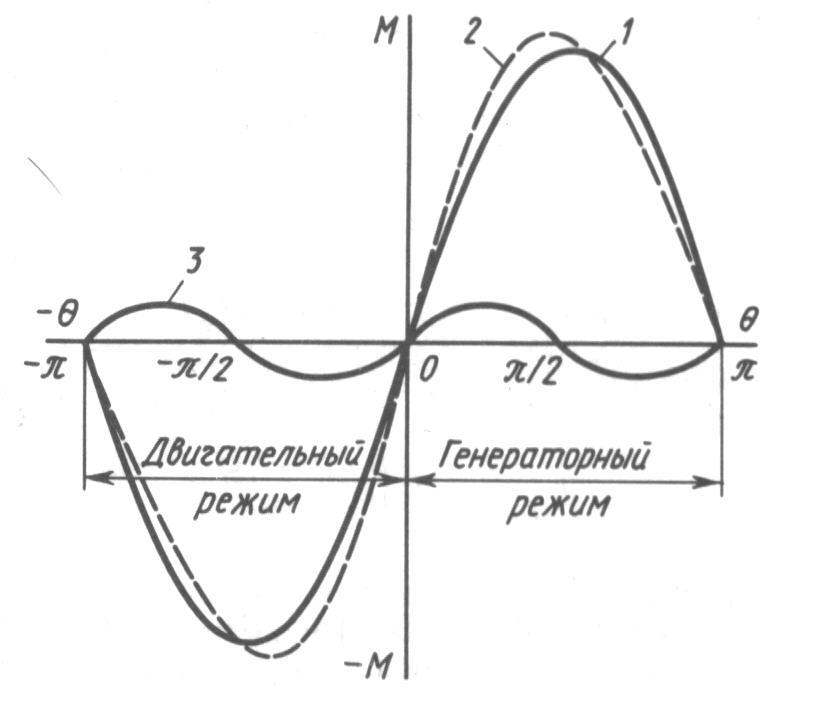
Устойчивой частью угловой характеристики в двигательном режиме является область от 0 до -900. Номинальный момент, соответствующий θном, находится в области 20-300. Двигатель с неявнополюсным ротором имеет максимум момента при θ = -900.
![]()
Максимальный момент зависит от размера воздушного зазора двигателя. Чем больше зазор, тем меньше xd и больше Мэм max. Но при большом зазоре растут габариты машины.
Предел устойчивости kп = Мэм max/Mэм ном. Удельный синхронизирующий момент, как и в генераторном режиме, максимален при θ=0 и равен нулю при θ=900.
![]()
Важное
значение для исследования процессов
преобразования энергии в СД имеют
рабочие
характеристики СД. Они
представляют
собой зависимости тока якоря
![]() ;
электромощности Р1,
поступающей в обмотку якоря; КПД и Cosφ
;
электромощности Р1,
поступающей в обмотку якоря; КПД и Cosφ![]() от отдаваемой механической мощности
Р2
при Uс-const,
fс-const,
IB-const.
от отдаваемой механической мощности
Р2
при Uс-const,
fс-const,
IB-const.
Обычно эти характеристики строятся в относительных единицах.
С ростом нагрузки на валу двигателя увеличивается момент и ток в якоре, сначала по линейному закону, а затем, из-за изменения параметров – по нелинейному закону. Если не изменяется Iв, Cos φ может падать, расти или иметь максимум. Это зависит от значения Iв и может быть прослежено по U-образным характеристикам: при увеличении Р2 – переходе с одной U-образной характеристики не другую Cos φ изменяется, так как из-за внутреннего падения напряжения кривая Cosφ=1 смещается в область больших нагрузок. При изменении Iв можно получить постоянное значение Cosφ при разных Р2 .
Т.к.
![]() - частота вращения постоянна, то
зависимости
- частота вращения постоянна, то
зависимости![]() ,
,![]() не приводятся, т.к. М вращающий момент
пропорционален Р2.
Зависимость
не приводятся, т.к. М вращающий момент
пропорционален Р2.
Зависимость
![]() имеет характер близкий к линейному.
имеет характер близкий к линейному.
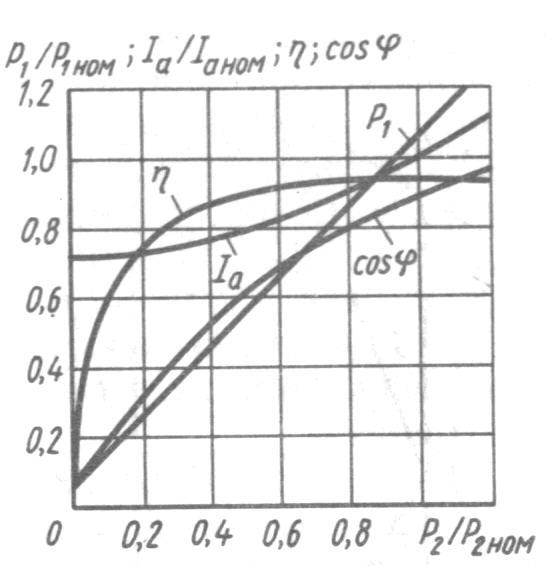
Кривая
![]() - такая же, как и для всех электрических
машин.
- такая же, как и для всех электрических
машин.
СД имеют предельно жесткие механические характеристики.
Синхронные
двигатели могут работать и с Cosφ=1,
но обычно рассчитывают их на работу при
номинальной нагрузке с опережающим
током и Cosφ=0,8..0,9.
В этом случае улучшается суммарный Cosφ
сети, от которой питаются синхронные
двигатели, т.к. создаваемая ими опережающая
реактивная составляющая
![]() компенсирует отстающую реактивную
составляющую тока асинхронного двигателя.
ЗависимостьCosφ=f
(P2)
при работе машины с перевозбуждением
имеет максимум в Р2>Рном.
При уменьшении Р2
– значение Cosφ
уменьшается, а отдавая в сеть реактивная
мощность возрастает.
компенсирует отстающую реактивную
составляющую тока асинхронного двигателя.
ЗависимостьCosφ=f
(P2)
при работе машины с перевозбуждением
имеет максимум в Р2>Рном.
При уменьшении Р2
– значение Cosφ
уменьшается, а отдавая в сеть реактивная
мощность возрастает.
Достоинства:
возможность работать с Cosφ=1 (следовательно, улучшается Cosφ сети, уменьшаются размеры ДВ). При работе с опережающим током они служат генераторами реактивной мощности, поступающей в АД, что снижает потребление этой мощности от генераторов электростанций;
меньшая чувствительность к колебаниям напряжения, т.к.
 ,
а неU2
как у
асинхронного;
,
а неU2
как у
асинхронного;постоянство частоты вращения, независимо от механической нагрузки на валу.
Недостатки:
сложность конструкции;
сложность пуска и плохие пусковые свойства;
трудность регулирования частоты вращения, которое возможно только путем изменения частоты питающего напряжения.
Недостатки делают невыгодным использование СД до 100 кВт. При более высоких мощностях, для улучшения Cosφ и уменьшения габаритных размеров, СД лучше АД.
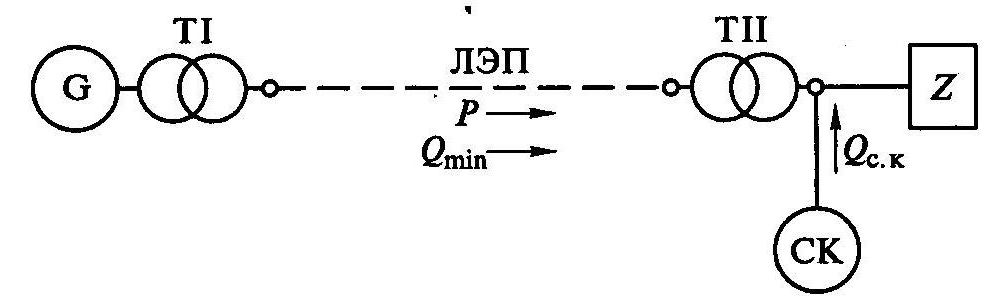
Синхронный компенсатор
СК представляет собой СМ, предназначенную для генерирования реактивной мощности. СК включают в электрическую систему с целью повышения ее коэффициента мощности.
Принцип действия СК заключается в том, что реактивную мощность, необходимую для работы некоторых потребителей, вырабатывает не СГ электростанции, а СК, установленный близко непосредственно у потребителя.
К потребителям реактивной мощности относятся асинхронные двигатели.
СК представляет собой СД, работающий в режиме холостого хода (Р2=0), т.е. без нагрузки на валу. При этом он вырабатывает реактивную мощность для потребителя.
Благодаря этому реактивная мощность в синхронном генераторе и сети доведена до минимума, что способствует повышению экономических показателей всей электрической системы.
Мощность СК, необходимая для повышения коэффициента мощности на каком–либо участке электрической системы от значения Cosφ1 до значения Cosφ1/ приближенно можно рассчитать
![]() ,
,
где S- полная мощность на данном участке электросистемы, кВА.
Обычно Cosφ повышают до значений 0,92 -0,95, так как экономия от повышения до бОльших значений не оправдывается значительными расходами.
Обычно СК работает с перевозбуждением, потребляя из сети опережающий ток, как конденсатор (иногда его называют Синхронный конденсатор).
Иногда СК работает с недовозбуждением. Это необходимо, если ток в электросистеме содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока, создаваемой потребителями на данном участке.
СК применяют так же для регулирования напряжения в конце и в промежуточных точках линии электропередачи (для стабилизации напряжения в сети).
При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем вначале линии; при малых нагрузках наоборот, под влиянием емкостных сопротивлений линии элпередачи напряжение в конце линии может даже повышаться по сравнению с напряжением вначале. Если же у потребителя включить СК, работающий при больших нагрузках с перевозбуждением, а при малых – с недовозбуждением, то в конце линии позволит поддерживать напряжение неизменным.
Достигается это путем регулирования тока возбуждения СК, что приводит к изменению реактивной составляющей тока линии электропередачи.
Наиболее важными характеристиками СК являются U-образные, определяющие основные параметры компенсатора, значения токов в обмотке статора и в обмотке возбуждения. СК не несет активной нагрузки и работает при значении угла θ=00, что обеспечивает ему большую перегрузочную способность.
Пуск СД
Принципиальных отличий в конструкции СД по сравнению с СГ нет. По сравнению с двигателями другого принципа действия (асинхронных и коллекторных СД имеют два существенных отличия: их механическая характеристика абсолютно жесткая, т.е. при изменениях нагрузочного момента на валу СД в пределах допустимого значения его частота вращения остается неизменно равной частоте синхронной n1.
СД долгое время находили применение редко, вследствие затруднений, связанных с пуском их в ход. СД не имеет начального пускового момента.
Пуск СД может быть частотным, при помощи разгонного двигателя или СД могут включаться на полное напряжение сети (асинхронный пуск).
Разгонный пуск
Электромагнитный вращающий момент Мэм будет все время направлен в одну сторону только при синхронной скорости вращения ротора. Если же двигатель подключить к сети переменного тока, когда его ротор неподвижен, а в обмотке возбуждения имеется постоянный ток, то электромагнитный момент, получающийся от взаимодействия неподвижного поля полюсов и перемещающихся с синхронной скоростью по окружности статора токов, будет в течение периода дважды менять свое направление, т.е. Мсредн за период равен нулю (ЕХ: над северным полюсом ротора будут иметь место токи то одного направления, то спустя полпериода, другого направления). Двигатель не придет во вращение, так как электромагнитный момент не сможет в течение полпериода разогнать ротор до синхронной скорости из-за его инерции.
Следовательно, для того, чтобы электромагнитный вращающий момент в синхронном двигателе был направлен все время в одну сторону, необходимо до подключения СД к сети разогнать его ротор с помощью внешнего момента (другим двигателем) до частоты вращения, близкой к синхронной. После этого, с помощью синхроноскопа подключают к сети. Т.е. как и СГ.
Пуск СД с помощью постороннего двигателя, называемого разгонным или пусковым, имеет ряд крупных недостатков. Мощность для разгонного двигателя составляет 5-15% от мощности СД, и притом только при небольших нагрузках. Т.е. установка громоздкая и неэкономичная. Применяется редко, в основном для СК.
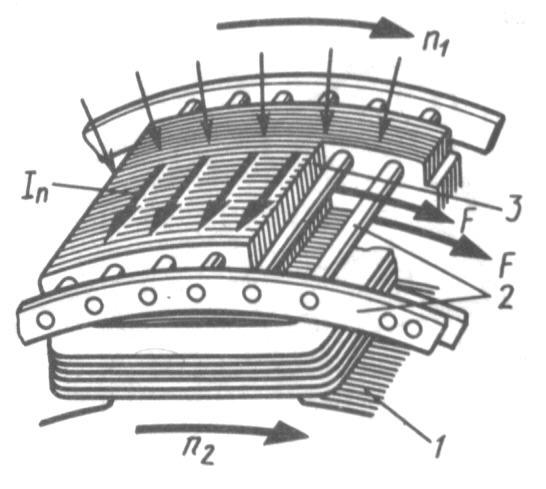
Метод асинхронного пуска – СД пускается как АД. Для этого его ротор должен быть снабжен специальной пусковой короткозамкнутой обмоткой, по типу «беличья клетка», выполненной из латуни (чтобы повысить сопротивление стержней). Стержни пусковой обмотки закладываются в пазы полюсных наконечников и соединяются торцевыми пластинами, образующими короткозамкнутые кольца. Вместо пусковой клетки иногда используются массивные полюсные наконечники, которые на торцах тоже должны быть соединены пластинами.
При
включении 3-фазной обмотки статора в
сеть образуется вращающееся магнитное
поле, которое взаимодействует с током
Iп
в пусковой обмотке, создает электромагнитные
силы F,
вращающий момент и разгоняет ротор.
После разгона ротора до частоты вращения,
близкой к синхронной (![]() ;s
≈ 0,05), постоянный ток обмотки возбуждения
создает синхронизирующий момент, который
втягивает ротор в синхронизм. Чем ниже
нагрузка на валу двигателя, тем легче
его вхождение в синхронизм.
;s
≈ 0,05), постоянный ток обмотки возбуждения
создает синхронизирующий момент, который
втягивает ротор в синхронизм. Чем ниже
нагрузка на валу двигателя, тем легче
его вхождение в синхронизм.
Осуществляют пуск по следующей схеме: обмотку возбуждения сначала замыкают на гасящий резистор RДоб в 8 - 12 раз больше RОВ. После разгона ротора до синхронной частоты вращения обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), и ротор втягивается в синхронизм.
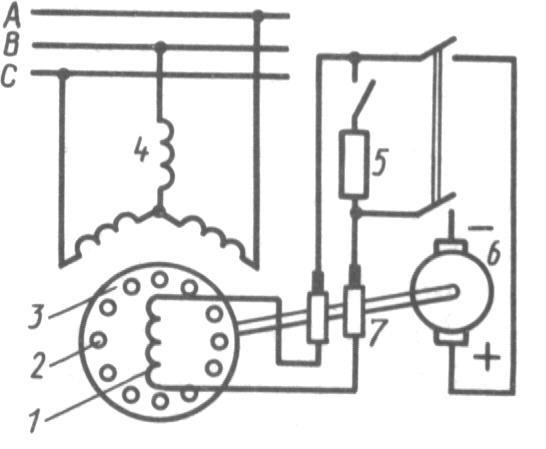
1- обмотка возбуждения, 2- пусковая обмотка («беличья клетка»), 3- ротор, 4- обмотка якоря, 5- резистор, 6 – ГПТ (возбудитель), 7- кольца и щетки
Запустить двигатель с разомкнутой ОВ нельзя, т.к. во время разгона ротора при S>0 в ней вращающимся магнитным полем индуцируется ЭДС
![]() ,
,
где
![]() -
частота изменения тока в обмотке
возбуждения;
-
частота изменения тока в обмотке
возбуждения;
wB - число витков обмотки возбуждения,
Фm - амплитуда магнитного вращающегося поля.
В начальный момент времени пуска при S=1 из-за большого числа витков ОВ ЕB может достигать больших значений и вызвать пробой изоляции.
Существует более простая схема пуска СД: ОВ постоянно подключена к возбудителю (поэтому ОВ можно считать замкнутой накоротко). С уменьшением скольжения до S=0,3…0,4 возбудитель возбуждается и в обмотку возбуждения подается постоянный ток, обеспечивающий при S = 0,05 втягивание в синхронизм. Эта схема работает не всегда, т.к. имеет худшие пусковые характеристики, чем первая. Причина ухудшения пусковых характеристик – одноосный эффект – влияние тока, индуцируемого в обмотке возбуждения при пуске, на характеристику пускового момента.
Одноосный эффект – явление одноосного включения.
При
асинхронном пуске СД в ОВ индуцируется
ЭДС с частотой
![]() и по обмотке проходит переменный ток,
создающий пульсирующее магнитное поле
(ОВ является однофазной обмоткой
переменного тока). Пульсирующее магнитное
поле можно разложить на 2 составляющие
прямое и обратное вращающиеся магнитные
поля ротора, которые характеризуется
потоками Фпр
и Фобр.
и по обмотке проходит переменный ток,
создающий пульсирующее магнитное поле
(ОВ является однофазной обмоткой
переменного тока). Пульсирующее магнитное
поле можно разложить на 2 составляющие
прямое и обратное вращающиеся магнитные
поля ротора, которые характеризуется
потоками Фпр
и Фобр.
Частота вращения каждого из них относительно ротора:
![]()
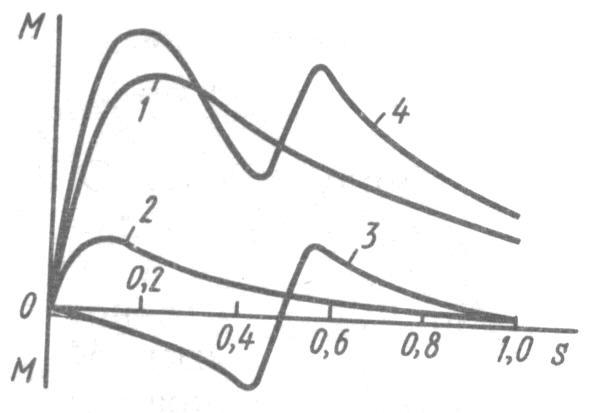
Прямое поле вращается синхронно с полем статора
 ,
следовательно, образуемый этим полем
электромагнитный момент Мпр,
изменяется в зависимости от скольжения,
как в АД (кривая
2).
,
следовательно, образуемый этим полем
электромагнитный момент Мпр,
изменяется в зависимости от скольжения,
как в АД (кривая
2).
Обратное поле ротора вращается относительно статора с частотой
 .
При частотах вращения
.
При частотах вращения (S>0.5)
обратное поле перемещается относительно
статора в противоположную сторону
относительно вращения ротора;
(S>0.5)
обратное поле перемещается относительно
статора в противоположную сторону
относительно вращения ротора;
При
![]() - поле неподвижно относительно статора;
- поле неподвижно относительно статора;
При
![]() (S<0.5)
оно перемещается однонаправлено с
ротором.
(S<0.5)
оно перемещается однонаправлено с
ротором.
В
обмотке статора обратным полем
индуцируется ЭДС, при этом в ней проходит
ток, который при взаимодействии с
обратным полем ротора создает
электромагнитный момент Мобр.
Т.к. направление момента зависит от
направления вращения поля
![]() ,
относительно статора, то Мобр
- знакопеременная величина и изменяет
направление при S=0,5
(кривая 3).
,
относительно статора, то Мобр
- знакопеременная величина и изменяет
направление при S=0,5
(кривая 3).
Таким образом, ток I, индуцируемый в ОВ при пуске двигателя создает электромагнитный момент, который при частоте вращения <0.5n1 является ускоряющим, а при >0.5n1 - тормозящим.
На роторе размещена пусковая обмотка, которая уменьшает обратное магнитное поле и создаваемый им момент Мобр. Этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1), создает в кривой результирующей пускового момента провал при n2=0.5 (кривая 4). Этот провал больше, чем больше IOB. Это ухудшает пусковые свойства СД.
Прямое включение допускается, если мощность сети достаточно велика и для нее допустимы большие пусковые токи, которые увеличиваются в 5÷6 раз от номинальных.
Следовательно, включение гасящего сопротивления в цепь обмотки возбуждения на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента.
Если необходимо уменьшить пусковые токи, то пуск производится при пониженном напряжении, как в мощных АД с короткозамкнутым ротором.
Так же применяется пуск при переключении обмотки статора со Y на Δ, что дает уменьшение фазного напряжения при пуске в √3 раз, линейного тока ≈ в 3 раза. Чаще для понижения напряжения используется автотрансформатор или реактор (реактивная катушка).
Регулирование частоты вращения СД.
Частота
вращения СД
![]() ,
следовательно, ее можно регулировать
изменением частоты питающего напряжения
или числом пар полюсов 2р.
,
следовательно, ее можно регулировать
изменением частоты питающего напряжения
или числом пар полюсов 2р.
Регулировать изменением числа полюсов неудобно, т.к. в отличие от АМ необходимо изменять число полюсов на статоре и на роторе, что усложняет конструкцию ротора.
Для СД, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения f1, чтобы двигатель не выпал из синхронизма.
Особенно сложен пуск двигателя, когда начальная частота α составляет доли Герца, а затем повышается до максимального значения. В этих случаях используют метод частотного регулирования с самосинхронизацией, при котором двигатель не может выпасть из синхронизма.
Вентильный двигатель. Принцип такого регулирования: управление преобразователем частоты осуществляется от системы датчиков положения
ротора, и напряжение подается на каждую фазу двигателя при углах нагрузки θ<900. В этом случае автоматически обеспечивается условие устойчивой работы двигателя и его перегрузочная способность.
СД, регулируемые путем изменения частоты с самосинхронизацией называют вентильными двигателями или бесколлекторными двигателями постоянного тока. Но эти двигатели могут получать питание от сети и переменного и постоянного тока. При питании ВД от постоянного тока в преобразователе частоты применяются транзисторы и тиристоры с узлами принудительной коммутации.
При питании ВД от транзисторного преобразователя частоты, преобразователь подключен к источнику постоянного тока и формирует 3-фазное напряжение изменяющей частоты, которого подается на фазы А, В, С обмотки якоря двигателя к каждой фазе можно подвести (+) и (-) напряжение.
Таким образом, изменяя частоту переключения транзисторов изменяется частота переменного напряжение, подав на фазы обмотки якоря, а следовательно и частота вращения ротора.
Для замыкания реактивной составляющей тока якоря в преобразователе имеются диоды, включенные параллельно транзисторам, в обратном направлении.