

10. Управляющие автоматы (уа) с программируемой логикой. Структурная организация. Способы адресации микрокоманд.
Автомат с программированной логикой (с хранимой в памяти логикой). Алгоритм работы записывается в управляющую память в виде последовательности управляющих слов – микрокоманд. Микрокоманда содержит информацию о микрооперациях, которые должны выполнятся в данном такте работы устройства, и об адресе микрокоманды, которая будет выполняться в следующем такте. Такие автоматы отличаются большой регулярностью структуры и возможностью оперативного внесения изменений в алгоритм работы проектируемого устройства.
Для описания микропрограмм выполнения операций чаще всего используется язык операторных схем алгоритмов. Множество входных сигналов управляющего автомата X={x1, x2, x3} определяется множеством логических условий; множество выходных сигналов управляющего автомата Y={y1, y2, … , y7, yk} – множеством управляющих сигналов, используемых для возбуждения микроопераций в операционном автомате, а закон преобразования входных сигналов в выходные определяется микропрограммой.
|
|
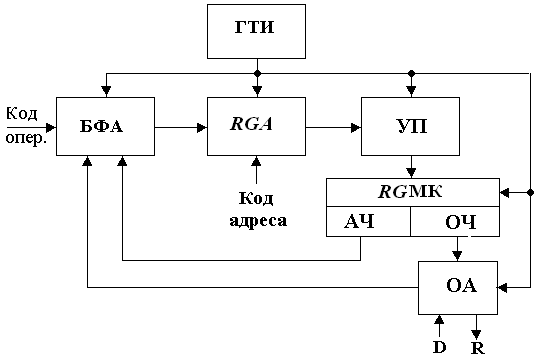
Для хранения микропрограмм используется блок управляющей памяти (УП), которая в большинстве случаев строится на основе постоянного запоминающего устройства (ПЗУ). RGА – регистр адреса микрокоманд, хранит адрес микрокоманды, выполняемой в данном такте. Блок формирования адресов микрокоманд (ФАМК) является основным блоком автомата. Блок ФАМК после установки на RGА начального адреса микрокоманды определяет все последующие адреса микрокоманд в соответствии с исходным алгоритмом управления. Регистр микрокоманд (RGМК) включает в себя две основные части (поля МК): адресную (АЧ) и операционную (ОЧ). ГТИ – генератор тактовых импульсов, определяет такты работы автомата. |
В микропрограммных УА широко используются два основных способа формирования адреса следующей микрокоманды – естественная (последовательная) и принудительная адресации. Способ адресации определяет структуру УА, поэтому различают УА с естественной и принудительной адресацией микрокоманд.
При естественной адресации, если МК следуют последовательно в естественном порядке, адрес следующей МК принимается равным адресу предыдущей МК, увеличенному на единицу: А := А+1. В этом случае МК содержит только операционную часть. Естественный порядок следования адресов может быть нарушен, т. е. может возникнуть необходимость перехода к микрокоманде с адресом А ≠ А+1. Переход может быть безусловным или зависеть от текущих значений логических условий. Для реализации в микропрограмме таких переходов в микрокоманде должна быть адресная часть. При естественной адресации обычно используются микрокоманды двух типов: операционные и управляющие. Возможная структура микрокоманд:
|
Операционная МК:
|
Управляющая МК:
| |||||||||||||||||||||||
|
|
УА с естественной адресацией микрокоманд. Блок УП представлен ПЗУ на 64 12-разрядных слова. В качестве регистра адреса (RGА) используется двоичный счетчик с возможностью параллельной записи информации. Пуск автомата производится подачей сигнала RGА:=0.По сигналу «Чтение» производится выборка слова из ПЗУ и занесение его в регистр команд (RGМК). Если RGМК(0)=0, то разрешается работа схем дешифраторов управляющих сигналов DC1 и DC2,выходы которых подключены к схеме формирования управляющих сигналов (СФУС). Через мультиплексор MS2 пропускается на управление RGА сигнал RGА:= RGА +1 для выборки следующей микрокоманды. Если RGМК(0) = 1, то блокируется работа DC1 и DC2, и через MS1 пропускается значение логического условия, номер которого указан в RGМК(2:5). Это значение складывается по модулю 2 со значением признака прямой или инверсной проверки логического условия П, записанного в РМК(1). Полученный сигнал через MS2 определяет сигнал на RGА. Если реализуется пустая операторная вершина ГСА, то в операционной микрокоманде оба поля Y равны нулю. Признаком конца МП является наличие единиц в разрядах операционной части регистра микрокоманд RGМК(6:11) операционной микрокоманды. | |||||||||||||||||||||||

Для принудительной адресации адрес следующей микрокоманды указывается в каждой микрокоманде с возможностью его модификации в зависимости от значений логических условий. Арес следующей микрокоманды задается безусловно или выбираться по условию, определяемому текущими значениями логических условий. Возможная структура микрокоманды :
|
АП |
Х1 |
Х2 |
Y1 |
Y2 | |||||||||
|
0 |
5 |
6 |
8 |
9 |
11 |
12 |
17 |
18 |
23 | ||||
Формат микрокоманды включает пять полей:
АП(0:5) – адрес перехода, причем 4 и 5 разряды используются для принудительной модификации адреса;
Х1(6:8) и Х2(9:11) – поля логических условий.;
Y1(12:17) и Y2(18:23) – поля управляющих сигналов.
|
|
Если содержимое поля ЛУ1 (ЛУ2) равно нулю, тогда запись происходит в RGА(4) и RGА(5) соответственно из RGМК(4) и RGМК(5). Если микрокоманда реализует пустую вершину ГСА, то поля Y1 и Y2 равны нулю. Признаком конца микропрограммы (конец алгоритма) будет нулевое содержание полей АП, ЛУ1 и ЛУ2. При составлении микропрограммы вначале следует пронумеровать все вершины ГСА. Кроме этого, если в ГСА есть операторные вершины, в которых записаны более двух микроопераций, то они должны быть разбиты на последовательность вершин, так как в микрокоманде имеется только два поля для записи кодов микроопераций Y1 и Y2.Необходимо учитывать, что в формате микрокоманд отведены только два поля для ЛУ. |
