

3.2 Системы отображения многоразрядных цифровых данных.
В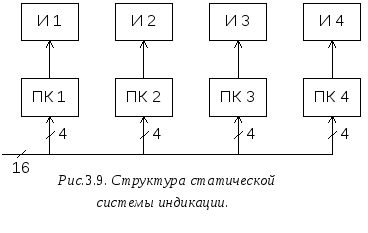 цифровых измерительных приборах
информация о значении измеряемой
величины обычно представляется в виде
десятичного числа, представляющего
собой совокупность разрядов принимающих
значения от 0 до 9. В статической системе
отображения информации, структура
которой приведена на рис. 3.9, каждый
индикатор обслуживается своим
преобразователем кода, на который
поступает двоично-десятичный код
соответствующей цифры. Ее недостаток
заключается в значительных аппаратных
затратах (количество преобразователей
кода должно быть равно разрядности
цифровых измерительных приборах
информация о значении измеряемой
величины обычно представляется в виде
десятичного числа, представляющего
собой совокупность разрядов принимающих
значения от 0 до 9. В статической системе
отображения информации, структура
которой приведена на рис. 3.9, каждый
индикатор обслуживается своим
преобразователем кода, на который
поступает двоично-десятичный код
соответствующей цифры. Ее недостаток
заключается в значительных аппаратных
затратах (количество преобразователей
кода должно быть равно разрядности![]() отображаемого десятичного числа) и в
большом количестве линий связи с
индикаторами. При использовании
семисегментных структур их число будет
равно
отображаемого десятичного числа) и в
большом количестве линий связи с
индикаторами. При использовании
семисегментных структур их число будет
равно![]() .
Кроме того, такая система неудобна при
последовательной передаче данных по
одной шине, так как потребуются
дополнительные регистры для хранения
кодов цифр.
.
Кроме того, такая система неудобна при
последовательной передаче данных по
одной шине, так как потребуются
дополнительные регистры для хранения
кодов цифр.
Динамические системы индикации свободны от ряда указанных недостатков. Их работа основана на свойстве инерционности человеческого зрения. Если светодиод периодически кратковременно вспыхивает, то при частоте следования вспышек более 25-30 Гц наблюдателю он будет казаться, светящимся непрерывно.
С
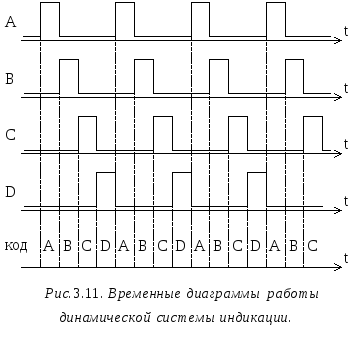 труктура
четырехразрядной системы динамической
индикации приведена на рис. 3.10, а временные
диаграммы ее работи на рис. 3.11.По
шине данных на преобразователь кода ПК
последовательно друг за другом поступают
коды символов A,
B,
C
и D.
Преобразователь формирует в виде
сигналов определенного, к примеру
нулевого уровня коды управления
индикаторами, которые подаются на
соединенные вместе одноименные сегменты.
труктура
четырехразрядной системы динамической
индикации приведена на рис. 3.10, а временные
диаграммы ее работи на рис. 3.11.По
шине данных на преобразователь кода ПК
последовательно друг за другом поступают
коды символов A,
B,
C
и D.
Преобразователь формирует в виде
сигналов определенного, к примеру
нулевого уровня коды управления
индикаторами, которые подаются на
соединенные вместе одноименные сегменты.
Ключ К подает импульс соответствующей полярности на общий электрод индикатора лишь в момент времени, когда на его сегментах действует набор сигналов определяющий конфигурацию требуемого символа.
Из временных диаграмм (рис. 3.11) следует, что в первый момент времени на индикаторе И1 вспыхнет символ А, остальные будут погашены, так как разность потенциалов между их электродами окажется нулевой. В следующий момент времени на втором индикаторе загорится символ В, затем на третьем – С, на четвертом – D и далее процесс будет периодически повторяться.
Если частота следования вспышек достаточно велика, то наблюдателю будет казаться, что индикаторы горят непрерывно, отображая каждый свой символ. При смене последовательности поступления кодов символов, к примеру – D, С, А, В, такими же будут и показания соответствующих индикаторов.
В данной структуре используются индикаторы с общим анодом. Для индикаторов с общим катодом, ключи на соответствующее время должны соединять эти электроды с корпусом, а преобразователь кода - формировать коды символов в виде положительных уровней напряжений.
В таких системах требуется лишь один преобразователь кода, и количество внешних линий связи сокращается до минимума.
Так
как индикатор вспыхивает лишь на короткое
время, то средняя яркость его свечения
будет определяться соотношением
![]() ,
где
,
где![]() - яркость свечения в статическом режиме
при том же значении прямого тока. Таким
образом, чтобы получить приемлемую
яркость в системах динамической индикации
величину импульсов тока через сегменты
необходимо увеличивать пропорционально
скважности управляющих сигналов. Под
скважностью понимают отношение периода
следования прямоугольных импульсов к
их длительности. Здесь она будет равна
числу индикаторов.
- яркость свечения в статическом режиме
при том же значении прямого тока. Таким
образом, чтобы получить приемлемую
яркость в системах динамической индикации
величину импульсов тока через сегменты
необходимо увеличивать пропорционально
скважности управляющих сигналов. Под
скважностью понимают отношение периода
следования прямоугольных импульсов к
их длительности. Здесь она будет равна
числу индикаторов.
Имеется несколько разновидностей систем динамической индикации, в частности с мультиплексированием каналов и с использованием компараторов. Структура первого варианта для четырех знакомест приведена на рис. 3.12, а временные диаграммы на рис. 3.13.
Счетчик СЧ формирует код номера знакоместа, мультиплексоры выбирают группу разрядов отображаемой в нем цифры. С выхода дешифратора на анод индикатора поступает положительный импульс, что приводит к засвечиванию соответствующей комбинации сегментов. С приходом очередного импульса на преобразователь кода поступают разряды следующей цифры и она отображается на соседнем индикаторе. Через четыре такта ситуация повторяется.
В такой системе требуется лишь один
преобразователь кода.. Вследствие того,
что здесь происходит последовательный
опрос индикаторов, частота тактового
генератора должна выбираться из
соотношения
такой системе требуется лишь один
преобразователь кода.. Вследствие того,
что здесь происходит последовательный
опрос индикаторов, частота тактового
генератора должна выбираться из
соотношения![]() ,
где
,
где![]() - наименьшая частота, при которой не
наблюдается мелькание (она составляет
порядка 25-30 Гц),
- наименьшая частота, при которой не
наблюдается мелькание (она составляет
порядка 25-30 Гц),![]() - количество индикаторов.
- количество индикаторов.
В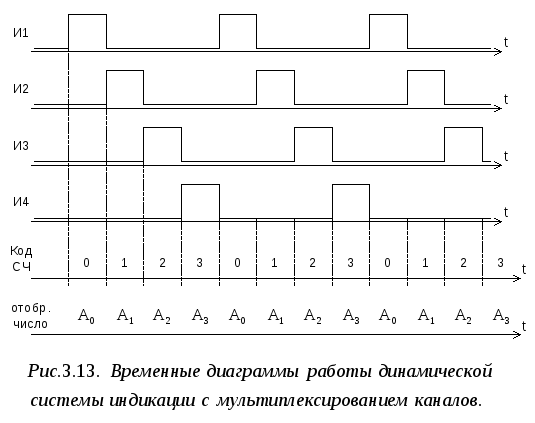
 системе, использующей метод компарации
(рис. 3.14), двоично-десятичный счетчик
последовательно во времени формирует
коды от 0 до 9, поступающие на входы А
компараторов и через преобразователь
кода на соответствующие сегменты
индикаторов. На входах В компараторов
присутствуют коды знаков, которые должны
отображаться в соответствующих разрядах.
системе, использующей метод компарации
(рис. 3.14), двоично-десятичный счетчик
последовательно во времени формирует
коды от 0 до 9, поступающие на входы А
компараторов и через преобразователь
кода на соответствующие сегменты
индикаторов. На входах В компараторов
присутствуют коды знаков, которые должны
отображаться в соответствующих разрядах.
При совпадении кода цифры с кодом счетчика, компаратор формирует импульс (рис. 3.15), поступающий на общий электрод индикатора и нем отображается соответствующая цифра.
Е сли
цифры в разрядах совпадают, например в
каналах К2 и К4, они будут одновременно
отображаться индикаторами И2, И4. Частота
тактового генератора в такой схеме
определяется соотношением
сли
цифры в разрядах совпадают, например в
каналах К2 и К4, они будут одновременно
отображаться индикаторами И2, И4. Частота
тактового генератора в такой схеме
определяется соотношением![]() ,
так как для любого количества разрядов
скважность импульсов на выходах
компараторов равна десяти.
,
так как для любого количества разрядов
скважность импульсов на выходах
компараторов равна десяти.
В особую группу выделяются индикаторы матричного типа, представляющие собой набор элементов (светодиодов), организованных в матрицу размером 5×7, 8×8 и т.п.
О дин
из вариантов структуры светодиодной
матрицы приведен на рис. 3.16. Здесь аноды
светодиодов подключены к столбцам, а
катоды к строкам, поэтому число внешних
выводов такого индикатора невелико.
Оно равно сумме числа строк и столбцов.
дин
из вариантов структуры светодиодной
матрицы приведен на рис. 3.16. Здесь аноды
светодиодов подключены к столбцам, а
катоды к строкам, поэтому число внешних
выводов такого индикатора невелико.
Оно равно сумме числа строк и столбцов.
Для отображения символов может использоваться развертка по строкам, либо по столбцам. В первом случае последовательно во времени на каждую из строк подается напряжение близкое к нулю. На столбцы в это время поступает набор сигналов высокого уровня, под действием которых вспыхивают светодиоды в соответствующих ячейках. При активизации другой строки набор светящихся ячеек может быть другим. После перебора всех строк процедуру сканирования повторяют.
В случае использования развертки по столбцам, на них поочередно подают напряжение высокого уровня, а на требуемые строки нулевые сигналы. В обоих случаях, активизируя в определенной последовательности элементы матрицы, можно воспроизвести любые изображения.