

А) автоматы на модулях «Модуль питания стенда» и «Модуль питания» включить, на модуле «Преобразователь частоты» переключатель sa1 переключить в верхнее положение, sa2 – в положение «Вперед»;
б) обратить внимание в следующих пунктах при снятии механических характеристик: ток якоря Ia испытуемой МПТ не должен превышать ±1 А;
в) для снятия механической характеристики в режиме динамического торможения, регулируя скорость вращения ротора МПТ с помощью асинхронной машины (на модуле «Преобразователь частоты» вращать движок потенциометра RP1), записать показания тока якоря Ia и частоты вращения n в таблицу 3.1 (рекомендуется зафиксировать не менее трёх точек на характеристике);
г) снять реостатные механические характеристики, повторив предыдущий пункт при введенном добавочном сопротивлении в цепь якоря МПТ (значение величины сопротивления задается преподавателем на модуле «Модуль добавочных сопротивлений»);
д) по завершении снятия показаний:
- на модуле «Преобразователь частоты» движок потенциометра RP1 выкрутить против часовой стрелки до упора, уменьшив частоту вращения ротора испытуемой МПТ до нуля;
- на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение;
- привести переключатели на стенде в исходное положение см. п.3.
Т а б л и ц а 3.1
Результаты измерения и расчета механических характеристик МПТ
|
n, об/мин |
Ia, A |
M, Н·м |
|
|
|
|
3.3. Расчеты и построения
1) Рассчитать коэффициент С по выражению (2.6) и электромагнитный момент, создаваемый испытуемой машиной постоянного тока, по выражению (2.5).
2) Построить снятые механические характеристики двигателя n = f (M).
3.4. Контрольные вопросы
1) В чем преимущество тормозных режимов МПТ по сравнению с механическими системами торможения?
2) Как осуществляется переход в режим динамического торможения?
3) В чем суть режима динамического торможения?
4) В чем преимущества и недостатки режима динамического торможения от других тормозных режимов МПТ?
5) Как изменяется наклон механических характеристик при увеличении сопротивления в цепи якоря?
4. исследование механических характеристик асинхронной машины в двигательном и генераторном режиме и противовключении
Ц е л ь р а б о т ы: исследовать работу асинхронной машины в двигательном и генераторном режиме и противовключении, построить соответствующие механические характеристики [].
4.1. Краткие теоретические сведения
Общие понятия о характеристиках электрических машин, режимах работы и их расположении на координатной плоскости приведены в теоретических сведениях лабораторной работы №2. С энергетической точки зрения все режимы работы асинхронной машины соответствуют описанным выше режимам для машин постоянного тока и характеризуются теми же превращениями энергии из одного вида в другой. Различие состоит лишь в схемах включения и принципах работы.
Во всех режимах работы, рассматриваемых в данной лабораторной работе, обмотка статора АМ должна быть подключена к источнику переменного синусоидального напряжения, создающего симметричную систему токов в фазах обмотки и круговое магнитное поле вращающееся в воздушном зазоре с частотой n1. Эту частоту вращения также называют частотой вращения идеального холостого хода или синхронной частотой. Ротор АМ вращается с частотой n.
Соотношение скоростей магнитного поля и ротора в различных режимах работы АМ:
- генераторный режим: n1 < n < ∞;
- идеальный холостой ход: n = n1;
- двигательный режим: 0 < n < n1;
- режим короткого замыкания: n = 0;
- торможение противовключением: –∞ < n < 0.
Электромагнитный момент асинхронной машины (АМ), в отличие от машин постоянного тока, имеет значительно более сложную зависимость от угловой скорости, чем выражение (2.3). Расчет электромагнитного момента АМ требует знания, как правило, неизвестных на практике величин всех сопротивлений обмоток машины.
Один из способов определения электромагнитного момента АМ основан на графическом методе.
Для этого при испытании асинхронной машины используют нагрузочную МПТ с независимым возбуждением, электромагнитный момент которой (MМПТ) можно определить по выражению (2.3). Регулируя скорость вращения ротора (n) путем изменения напряжения, подаваемого на якорь МПТ при неизменном магнитном потоке, снимают зависимость n = f (MМПТ) во всех режимах работы АМ. Данная зависимость графически представляет собой разрывную линию при изменении знака скорости (рис. 4.1).
Исходя из уравнения установившегося движения электропривода [Чиликин], для определения электромагнитного момента испытуемого двигателя необходимо к значению электромагнитного момента нагрузочной машины постоянного тока прибавить (с учетом знака) момент потерь:
МАМ = ММПТ+Мпот . (4.1)
Н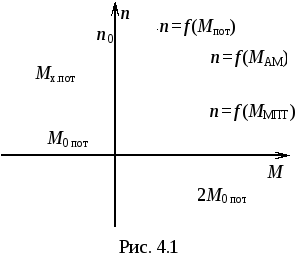 а
рис. 4.1 показаны зависимости
n = f (MМПТ),
n = f (Мпот)
и полученная путем сложения моментов
в соответствии с (4.1) зависимость
n = f (MАМ).
Следует обратить внимание на то, что
правая часть выражения (4.1) представляет
собой алгебраическую сумму моментов,
т. е. все три момента, входящие в данное
выражение, могут быть как положительными
так и отрицательными в зависимости от
режима работы асинхронной машины.
а
рис. 4.1 показаны зависимости
n = f (MМПТ),
n = f (Мпот)
и полученная путем сложения моментов
в соответствии с (4.1) зависимость
n = f (MАМ).
Следует обратить внимание на то, что
правая часть выражения (4.1) представляет
собой алгебраическую сумму моментов,
т. е. все три момента, входящие в данное
выражение, могут быть как положительными
так и отрицательными в зависимости от
режима работы асинхронной машины.