

Двигательный режимхарактеризуется тем, что машина преобразует электрическую энергию, потребляемую от источника, в механическую и передает ее рабочему механизму.
При этом момент и частота вращения ротора направлены в одну сторону:
- I квадрант (> 0, М> 0) – вращение ротора происходит в сторону, совпадающую той, что выбрана за положительное направление вращения (см. рис. 2.1);
- III квадрант (< 0, М< 0) – вращение ротора происходит в противоположную сторону (характеристики можно получить из показанных на рис. 2.1, произведя их симметричный перенос относительно начала координат).
Следует иметь в виду, что в любом режиме работы электрическая машина преобразует определенную часть энергии в тепло. Эту энергию называют потери.
Режим короткого замыкания характеризуется тем, что частота вращения ротора равна нулю, но машина, как и в двигательном режиме, подключена к сети и потребляет электрическую энергию, однако преобразует ее только в тепловую.
Такой режим соответствует точке пересечения механической характеристики с осью абсцисс.
В режиме короткого замыкания машина находится каждый раз при пуске в тот момент, когда ее подключают к сети. Также машина может перейти в данный режим, например, из двигательного в случае, когда момент внешних сил выше электромагнитного момента двигателя.
Тормозные режимы характеризуются тем, что момент и частота вращения направлены в противоположные стороны (т.е. встречно). При этом характеристики располагаются в II и IV квадрантах.
Преимущество применения тормозных режимов электропривода по сравнению с механическими системами торможения – отсутствие механического износа тормозных колодок.
Генераторный режим (генераторное или рекуперативное торможение) характеризуется тем, что машина преобразует механическую энергию, получаемую от рабочего механизма, в электрическую и отдает ее в сеть.
Для обеспечения этого способа торможения необходимо, чтобы скорость вращения ротора превышала скорость вращения идеального холостого хода ( 0). В этом случае ЭДС, наводимая в обмотке якоря, превышает напряжение, приложенное к ней (Еа > Uа), следовательно, машина становится источником, а сеть – приемником электроэнергии (направление тока якоря изменяется на противоположное).
Такой способ торможения применяется в приводах подъемных механизмов при спуске груза, или на тяге при движении с горки.
Генераторное торможение наиболее экономично, поскольку оно сопровождается отдачей электроэнергии в сеть.
Торможение противовключением (режим электромагнитного тормоза) характеризуется тем, что машина потребляет из сети электрическую энергию, расходуемую на торможение ротора, движущегося под действием внешнего момента или сил инерции. Вся потребляемая энергия преобразуется в тепловую.
Такой способ позволяет осуществить быстрое торможение рабочего механизма. На практике данный режим осуществляется путем смены полярности напряжения, приложенного к обмотке якоря. Также такой режим, как аварийный, может возникнуть в электроприводе грузоподъемных механизмов, когда двигатель включен на подъем, а тяжесть груза заставляет вращаться привод в обратном направлении.
Ток якоря при торможении противовключением значительно превышает номинальное значение. Для его ограничения в цепь якоря вводится добавочное сопротивление Rр.
2.2. Методические рекомендации к проведению исследования
Для выполнения экспериментального исследования необходимо:
1) Изучить электрическую схему лабораторного стенда (рис. 2.2).
Записать паспортные данные машины постоянного тока: номинальные частоту вращения якоря nн, ток обмотки якоря Iан, мощность Pн.
2) Собрать на лабораторном стенде схему для исследования (рис. 2.2).
3) Привести переключатели схемы в исходное положение:
а) на модулях «Модуль питания стенда» и «Модуль питания» автоматы отключить;
б) на модуле «Модуль добавочных сопротивлений» переключатель перевести в положение «0» (против часовой стрелки до упора);
в) на модуле «Тиристорный преобразователь» кнопку «Сеть» отключить, переключатель SA1 перевести в положение «Iя», SA2 – «Скорость», SA3 – «Руч», SA4 – «НМ», SA5 перевести в среднее положение «Стоп», SA6 «Разрешение» перевести в нижнее положение, движок потенциометра RP1 выкрутить против часовой стрелки до упора –в положение «0»;
г) на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение, SA2 перевести в среднее положение, SA3 – в положение «Скорость», движок потенциометра RP1 выкрутить против часовой стрелки до упора –в положение «0».
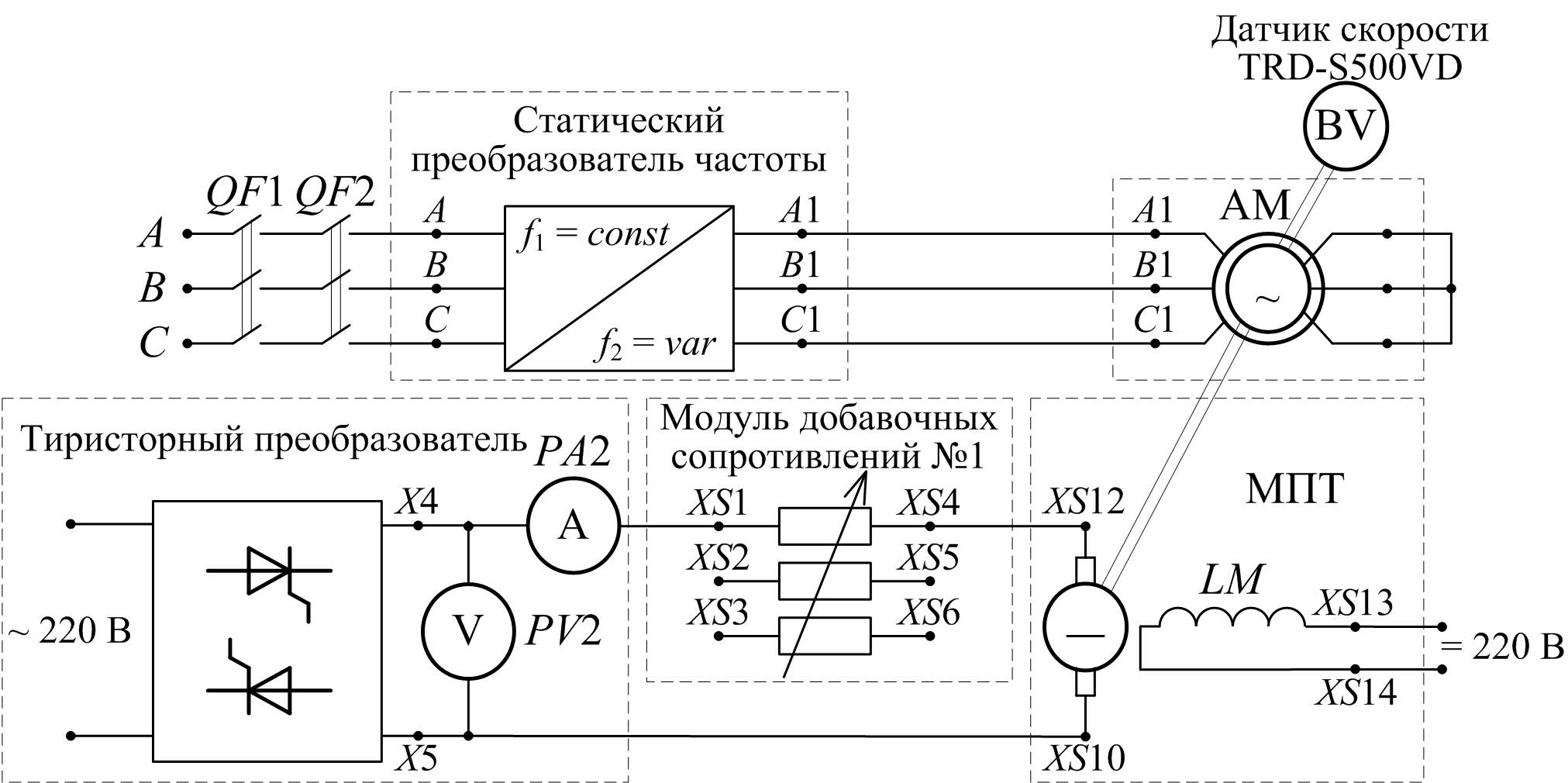
Рис. 2.2. Схема испытания двигателя постоянного тока с независимым
возбуждением в двигательном и генераторном режиме и противовключении
4) Перед включением необходимо, чтобы схема испытания была проверена преподавателем.
5) Последовательность действий при выполнении эксперимента:
а) автоматы на модулях «Модуль питания стенда» и «Модуль питания» включить, на модуле «Тиристорный преобразователь» кнопку «Сеть» включить, переключатель SA5 перевести в верхнее положение «Вперед», SA6 «Разрешение» перевести в верхнее положение, на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в верхнее положение, переключатель SA2 перевести в верхнее положение «Вперед»;
б) на модуле «Тиристорный преобразователь» вращая по часовой стрелке движок потенциометра RP1, проверить направление вращения ротора испытуемой МПТ в двигательном режиме и вновь остановить ротор, вернув движок потенциометра RP1 в исходное положение;
в) на модуле «Преобразователь частоты» движок потенциометра RP1 вращая по часовой стрелке, проверить направление вращения ротора асинхронной машины в двигательном режиме и вновь остановить ротор, вернув движок потенциометра RP1 в исходное положение;
г) в случае если направление вращения ротора асинхронной машины в двигательном режиме не совпало с направлением вращения ротора испытуемой МПТ в двигательном режиме, необходимо изменить порядок чередования фаз, подключенных к обмотке статора асинхронной машины;
д) на модуле «Преобразователь частоты» вращая по часовой стрелке движок потенциометра RP1, довести частоту вращения ротора асинхронной машины до значения n0 = 1000 об/мин (показания контролировать на модуле «Силовой модуль» по датчику скорости) и на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение (вращение ротора остановится);
е) на модуле «Тиристорный преобразователь» вращая по часовой стрелке движок потенциометра RP1, довести частоту вращения ротора испытуемой МПТ до значения n0, на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в верхнее положение (обе машины подключены к сети и совместно вращаются в двигательном режиме, не нагружая одна другую);
ж) обратить внимание в следующих пунктах при снятии механических характеристик: ток якоря Ia испытуемой МПТ не должен превышать ±1 А;
з) для снятия механической характеристики в режиме генераторного торможения, идеального холостого хода, двигательного режима и короткого замыкания, регулируя скорость вращения ротора МПТ с помощью асинхронной машины (на модуле «Преобразователь частоты» вращать движок потенциометра RP1), записать показания тока якоря Ia и частоты вращения n в таблицу 2.1 (рекомендуется зафиксировать по одной точке в каждом режиме);
и) для снятия механической характеристики в режиме торможения противовключением:
- на модуле «Преобразователь частоты» выкрутить движок потенциометра RP1 против часовой стрелки до упора в положение «0» (переведя машину в режим короткого замыкания – ротор заторможен),
- на модуле «Преобразователь частоты» переключатель SA2 перевести в нижнее положение «Назад»,
- на модуле «Преобразователь частоты» вращая движок потенциометра RP1 по часовой стрелке, записать показания тока якоря Ia и частоты вращения n в таблицу 2.1;
к) снять реостатные механические характеристики, повторив два предыдущих пункта при введенном добавочном сопротивлении в цепь якоря МПТ (значение величины сопротивления задается преподавателем на модуле «Модуль добавочных сопротивлений»);
л) по завершении снятия показаний:
- привести схему к режиму работы двигателей без нагрузки (частота вращения вновь станет равной n0 = 1000 об/мин);
- на модуле «Преобразователь частоты» переключатель SA1 «Разрешение» перевести в нижнее положение;
- на модуле «Тиристорный преобразователь» движок потенциометра RP1 выкрутить против часовой стрелки до упора, уменьшив частоту вращения ротора испытуемой МПТ до нуля;
- привести переключатели на стенде в исходное положение см. п.3.
Т а б л и ц а 2.1
Результаты измерения и расчета механических характеристик МПТ
|
n, об/мин |
Ia, A |
M, Н·м |
|
|
|
|