

2736_САУ
.pdfГБ КМ
КБ |
|
|
2П1-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
1М |
|
|
ЛК1-2 |
|
1ЛК1-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РК |
|
|
|
|
|
|
П1-2 |
|
|
|
|
|
|
|
|
|
|
РК12-18 |
1П1-2 |
|||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РК |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М-4 |
|
|
|
|
2ЛК1-2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Положение |
|
|
|
|
|
|
|
|
|
|
|
1П32М |
|
|
|
ПВ-2 ПВ-3 |
|
|
0 |
|
РК2-18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3-4 |
|
РК11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1-4 |
|
РК1-8 |
|
|
РУ |
|
|
|
|
|
|
|
|
|
|
||
|
2-4 |
|
РК 9−10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12-13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
РК16-17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Пружина |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Якорь |
|
РУ-П |
|
ПВ-1 |
|
|||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
РУ |
|
|
РУ |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
m |
|
|
|
|
|
М |
|
|
|
|
|
V |
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поезд |
|
|
|
|
|
|
|
ТЭ |
|
ДК |
|
|
ДК |
|
|
|||||||||||
|
R |
|
|
|||||||||||||||||||
|
|
|
|
|
F |
V |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
nк |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
РК11-12 |
|
|
|
|
|
|
|
|
|
|
|
|
β1 |
|
|
|
|
|
||||
|
|
Ш1-2 |
|
|
|
|
|
|
|
|
|
|||||||||||
РК17-18 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
β2 |
РУ-С |
|
11,12 |
|
|
|
|
|
Рис. 5. Функциональная схема системы управления электропоездом
Построенная пусковая диаграмма была бы справедлива, если бы аппараты выполняли свои функции без затраты времени и длительность переходных процессов равнялась бы нулю.
При значительных пусковых ускорениях, характерных для электропоездов пригородного сообщения, время разгона на каждой позиции оказывается соизмеримым с временем срабатывания аппарата и временем переходных процессов. Эти обстоятельства оказывают заметное влияние на вид пусковой диаграммы, которую Вам надлежит уточнить в результате выполнения последующих шагов программы задания.
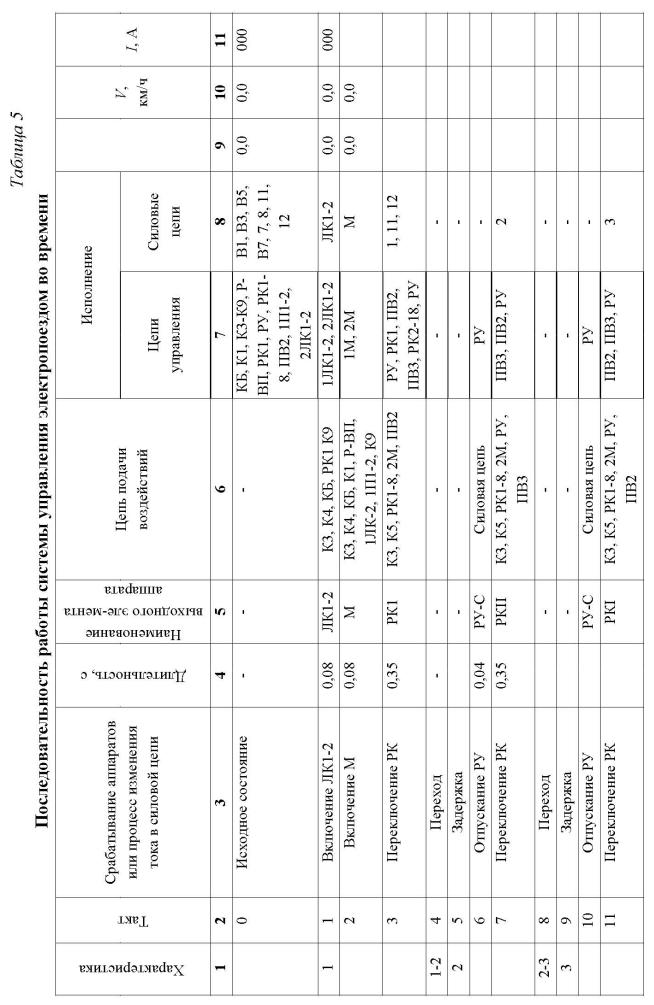
Втабл. 5 приведена последовательность работы аппаратов и все изменения, происходящие в силовой схеме и цепях управления, в том порядке, который соответствует реализации алгоритма управления электропоездом.
Впервой колонке таблицы 5 указаны порядковые номера скоростных характеристик
ипереходы с характеристики на характеристику соответственно (рис.4).
Очередность процессов во времени отражается порядковыми номерами тактов в колонке 2, а их наименование – в колонке 3.
Каждый такт продолжается определенное время, его длительность (колонка 4) зависит от времени срабатывания аппаратов или продолжительности процессов
11
изменения тока в силовой цепи. Сумма всех времен, записанных в колонке 4, соответствует длительности автоматического пуска электропоезда.
Отсчет времени пуска начинается с момента постановки главной рукоятки контроллера машиниста в 4-е положение при трогании с места. Тогда через контакты безопасности (КБ) и соответствующие блокировки (см. рис. 3 и 5) получает питание катушка электропневматического вентиля линейных контакторов ЛК1-2 и через 0,08 с замыкаются их контакты в силовой цепи (см. строку 1 такта табл. 5). В колонке 5 табл. 5 записаны наименования входных элементов аппаратов, в колонке 6 записано состояние цепи управления, по которым подается питание (воздействие) на входной элемент, а в колонках 7 и 8 записаны все изменения в цепи управления и силовой цепи, которые происходят после срабатывания аппарата. Таким аппаратом в строке такта 1 являются сдвоенный линейный контактор ЛК1-2. Однако, как видно из силовой схемы (рис. 2), тока в цепи двигателя еще не будет, так как цепь не собралась.
На такте 2 через замыкающую блокировку 1ЛК1-2 получает питание катушка вентиля мостового контактора М (см. рис. 3 и 5) и через 0,08 с замыкаются его контакты в силовой схеме (см. рис. 2); силовая цепь собирается, и в тяговых двигателях появляется ток, величина которого соответствует току трогания I1 на 1 характеристике (рис. 4) и записывается в колонку 11.
С момента включения контактора М начинается ускоренное движение электропоезда. На такте 3 по цепи, записанной в колонке 6 табл. 5, получает питание катушка вентиля РК1 привода реостатного контроллера РК (см. рис. 3 и 5) и через 0,35 с в результате переключения РК в силовой цепи замыкается реостатный контактор 1. Сопротивление реостата уменьшается и происходит переход на 2-ю скоростную
характеристику.
Переход характеризуется возрастанием тока и происходит при скорости движения, которую успел набрать поезд за время 0,35 с на такте 3. Величину приращения скорости за время длительности такта 3, скорость движения и ток двигателей в конце такта записывают в колонке 9, 10, 11 соответственно.
Возрастание тока двигателей при переходах с предыдущей на последующую скоростную характеристику замедляется влиянием индуктивности в силовой цепи и происходит в течение некоторого промежутка времени (рассматривается подробно на следующем шаге). Приращение скорости движения, скорость и ток в конце такта 4 записываются в колонки 9, 10, 11 табл. 5.
После выхода на очередную скоростную характеристику наступает задержка в работе системы автоматического пуска. За время задержки (такт 5, табл. 5) скорость движения увеличивается, а ток двигателей уменьшается (см. рис. 4) до величины тока уставки РУ. На такте 6 через 0,04 с якорь реле ускорения отпадает, контакты РУ замыкаются и получает питание катушка вентиля РК11. Начинается переключение РК (такт 7), которое завершается переходом на 3-ю скоростную характеристику (такт 8).
12
13

14
15

16
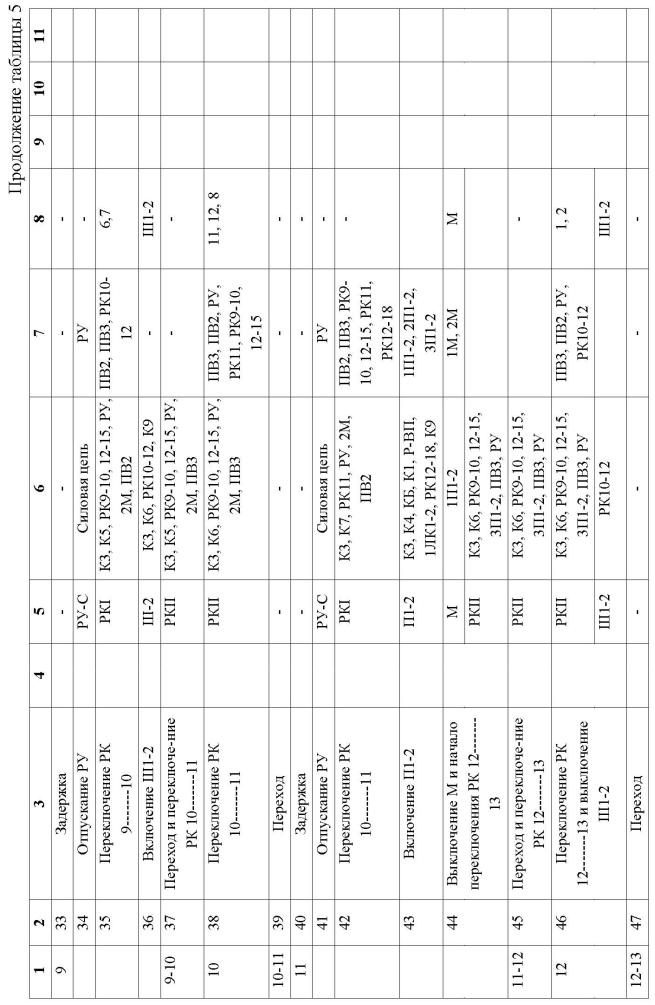
Рассмотренная последовательность работы системы сохраняется на последующих тактах. Исключение составляют такты с 37 по 47, которые рассматриваются в дальнейшем. В строках каждого такта (табл. 5) записывают приращение скорости движения за время длительности такта – V, скорость движения V и ток двигателей I в конце такта.
Задержка на очередной скоростной характеристике, необходимая для реализации требуемой пусковой диаграммы, обеспечивается работой подъемной катушки реле ускорения РУ-II. Подъемная катушка включается контактором ПВI, который замыкается в период вращения вала реостатного контроллера на короткое время – 0,09 с (см. рис. 6). Магнитодвижущая сила катушки РУ-II складывается с МДС силовой катушки РУ-С и способствует притяжению якоря РУ при токах, меньших тока притяжения (Iпр = 1,25Iy). Если к моменту размыкания ПВI и выключения РУ-II ток в силовой катушке РУ-II окажется меньше тока уставки Iy, то якорь реле отпадает, контакты РУ замыкаются и начинается процесс переключения РК. Такая работа системы называется хронометрической и рассматривается на последующих шагах.
На данном шаге нужно изучить и усвоить работу системы управления электропоездом, усвоить содержание табл. 5 и самостоятельно заполнить колонки 5, 6, 7 и 8, начиная с такта 49 и до конца таблицы.
3.4. Динамические характеристики цепи тяговых двигателей
Динамические характеристики устройства выражают изменение во времени выходной величины при скачкообразном изменении входной. Динамическими характеристиками цепи тяговых двигателей являются зависимости, показывающие изменение тока во времени после изменения сопротивления пускового реостата R после включения и отключения шунтирующих цепей, после перегруппировки двигателей. Процесс изменения тока после изменения параметров R, β, m называется переходным процессом.
Уравнение переходного процесса, возникающего после закорачивания секции пускового реостата, можно получить путем решения уравнения электрического равновесия силовой цепи в период перехода с n-й на (n+1)-ю позицию
|
V = mC ΦV + i(R |
n+1 |
+ mr ) + mL |
di |
, |
(4) |
|
|
c |
V |
Д |
Д dt |
|
|
|
где Rn+1 |
– сопротивление реостата после закорачивания очередной секции; |
||||||
LД |
– индуктивность обмоток двигателя. |
|
|
|
|||
Точный расчет искомой функции является довольно сложным. При возрастании тока изменяются магнитный поток, сила тяги и скорость движения. Изменяется и индуктивность LД, которая зависит от насыщения магнитной системы двигателя. Кроме того, на изменения магнитного потока оказывают влияние возникающие в остове двигателя вихревые токи. Аналитическое решение дифференциального уравнения оказывается настолько громоздким, что его предпочтительно решать на ЭВМ.
17
18
Рис. 6. Развертка реостатного контроллера
Текущее значение магнитного потока Ф определяется нелинейной функцией Ф(i), которую для расчетов удобно заменить зависимостью удельной ЭДС от тока двигателя
CVФ(i).
Для использования при дальнейших расчетах ее нужно линеаризировать и представить в аналитическом виде. Линеаризированная зависимость выражается функцией
|
|
СV Φ = СV Φ o + KΦ i , |
(5) |
где СV Φ o |
- значение удельной ЭДС в точке пересечения касательной с осью ординат; |
||
KΦ = |
СV Φ |
- угловой коэффициент. |
|
|
ΔΙ |
|
|
Поскольку в дальнейших расчетах потребуется только угловой коэффициент KΦ , его можно рассчитать аналитически без построения кривой намагничивания. Для этого нужно вычислить приращение магнитного потока при изменении тока возбуждения от IB1 = 1,15IH до IB2 = 1,45IH ; указанным токам соответствуют скорости движения V1 = 0,45VH и V2 = 0,40VH при работе на 9 позиции.
Тогда приращение магнитного потока определяется из условия:
Сυ |
Φ = |
0,5U ДН −1,45Ι Н rД |
− |
0,5U ДН −1,15Ι Н rД |
|
. |
(6) |
|
|
0,45VH |
|
||||||
|
|
0,4VH |
|
|
|
|
|
|
Соответствующее изменение тока, А, будет: |
|
|
|
|||||
ΔΙ = Ι В2 − Ι В1 = 0,3Ι Η . |
|
|
|
|
|
(7) |
||
Если пренебречь |
изменением |
индуктивности и |
влиянием изменения скорости |
|||||
движения на величину ЭДС, то с учетом полученной линеаризованной зависимости СV Φ (i) уравнение электрического равновесия принимает вид:
VC = m(СV Φ o + KΦ i)Vнач + i(Rn+1 + mrД ) + mLД |
di |
, |
(8) |
|
dt |
|
|
где Vнач - скорость, при которой начинается переходной процесс.
Когда двигатель работает по характеристике n-й позиции, его ток в момент замыкания контактора в силовой схеме соответствует току начала переходного процесса Iнач.. Процесс возрастания тока заканчивается, когда он достигает значения, определяемого характеристикой последующей (n+1)-й позиции. Ток выхода на характеристику последующей позиции будем называть конечным значением тока перехода Iк.
С учетом принятых обозначений решение уравнения (8) имеет вид:
|
|
|
|
|
|
|
− |
t |
|
|
|
|
|
|
|
|
|
|
(9) |
||
i = I |
нач |
+ (I |
к |
− I |
нач |
)(1 |
− е τ ) , |
|||
|
|
|
|
|
|
|
|
|||
где τ – постоянная времени цепи, с;
τ = |
|
mLД |
|
|
. |
(10) |
||
R |
+ m(r |
Д |
+ K V |
нач |
) |
|||
|
n+1 |
|
Φ |
|
|
|
||
|
|
|
|
|
|
|
|
19 |

Если проанализировать уравнение (9), то можно убедиться, что переходной процесс практически закончится (т.е. i достигает значения I к) через время t = 3τ. Поэтому при расчетах длительность электрического переходного процесса будем принимать tэп = 3τ. Пока мы еще не можем рассчитать tэп при реостатном регулировании, так как нам неизвестна скорость Vнач , при которой начинаются переходные процессы. Этот расчет будет выполнен в дальнейшем. Необходимая для расчета величина индуктивности обмоток двигателя выбирается из таблицы 6.
Таблица 6
Величина индуктивности обмоток
Последняя |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
цифра шифра |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Индуктивно |
|
|
|
|
|
|
|
|
|
|
сть обмоток |
0,021 |
0,022 |
0,023 |
0,024 |
0,025 |
0,026 |
0,027 |
0,028 |
0,029 |
0,030 |
двигателя |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переходные процессы, возникающие при уменьшении β, имеют гораздо большую длительность по сравнению с переходными процессами при реостатном регулировании. Поэтому пренебрегать изменением скорости за время перехода в этом случае нельзя. Совместное влияние увеличения скорости и увеличения тока якоря приводит к тому, что ЭДС тягового двигателя в течение переходного процесса практически остается неизменной. При этом допущении (оно подтверждается обработкой осциллограмм тока) возрастание тока во времени соответствует функции (9). Постоянная времени τв (с), определяющая длитель-ность переходного процесса tэп = 3τ при уменьшении β, рассчитывается по формуле:
|
τ В = |
2LЯ + LШ |
, |
(11) |
|||
|
|
|
|||||
|
|
2r + R |
Ш |
|
|||
|
|
|
Я |
|
|
||
где rЯ |
– сопротивление обмотки якоря и добавочных полюсов; |
||||||
RШ |
– сопротивление цепи, шунтирующей обмотки возбуждения на i-й ступени |
||||||
|
регулирования возбуждения; |
|
|||||
LЯ , LШ |
– индуктивность обмоток якоря и добавочных полюсов, индуктивность шунта |
||||||
|
соответственно. |
|
|
|
|||
В курсовом проекте для расчета принимаем LЯ = 0,5LД , LШ = 0,1rН ,rЯ = 0,6rД . |
|||||||
Величина RШ зависит от величины коэффициента регулирования возбуждения на i-й |
|||||||
ступени регулирования. |
|
|
|
|
|||
|
RШ = |
2β i |
rB , |
(12) |
|||
1− β i
где rB = 0,4 Ом – сопротивление обмотки возбуждения. 20