

2736_САУ
.pdfНа этом шаге нужно рассчитать величины RШ для принятых на электропоезде ЭР2 значений β1 = 0,67 и β2 = 0,5 и определить соответствующие величины τв1 и τв2.
Расчет переходного процесса при выключении шунтирующей цепи даст достаточную сходимость с результатами осциллографирования переходных процессов, если для расчета использовать формулу (10). Этой же формулой можно пользоваться и при расчете переходного процесса при перегруппировке двигателей, возникающего в результате выключения контактора М.
3.5. Динамические характеристики электрических аппаратов системы
Каждый электрический аппарат - устройство, имеющее один или несколько входов, на которые подается управляющее воздействие, в результате чего изменяется состояние одного или нескольких выходов.
Элементы аппарата, воспринимающие воздействия, будем называть входными, а выходы в зависимости от их назначения – элементами исполнения или связи.
Врассматриваемой системе управления входными элементами являются обмотки электропневматических вентилей, управляющих приводом тяговых аппаратов. Исключением является реле ускорения РУ, имеющее два входных элемента - обмотку в силовой цепи РУ-С и обмотку подъемной катушки РУ-П в цепи управления.
Элементами исполнения тяговых аппаратов являются их силовые контакты, обеспечивающие работу силовых цепей. Исполнительные элементы контроллера машиниста (КМ) и реле ускорения (РУ) включены в цепи управления.
Кэлементам связи относятся блокировки данного аппарата, обеспечивающие требуемый порядок работы аппаратов. Контроллер машиниста имеет механические связи между рукоятками (механические блокировки).
Вструктурных схемах систем автоматические коммутационные аппараты изображаются в виде динамического звена с запаздыванием. Это связано с тем, что переключение выходных элементов аппарата происходит с некоторым запаздыванием относительно момента изменения управляющего воздействия на его входе. Поэтому динамическая характеристика аппарата представляет собой ступенчатую функцию, смещенную относительно начала координат на величину запаздывания. Величина запаздывания определяется длительностью электрических и механических переходных процессов в аппарате и зависит от ряда эксплуатационных факторов: напряжения питания цепей управления, давления сжатого воздуха, температуры и т.д.
Для расчетов в курсовом проекте принимаются следующие значения времен запаздывания:
-t ру = 40 мс – время отпадания якоря РУ (время от момента достижения тока
уставки до момента замыкания контактов РУ);
- t = 20 мс – время срабатывания РУ (время от момента замыкания контакта
ру
ПВI до момента размыкания контактов РУ); 21
- tк = t |
|
= 80 мс – время включения и |
отключения контакторов с индивидуальным |
|||||
к |
|
|
|
|
||||
|
|
приводом (переходного, мостового, регулирование возбуждения). |
||||||
Зная инверсии в обозначениях t |
, t |
обозначает размыкание контакта аппарата. |
||||||
|
|
|
ру |
|
|
к |
|
|
Время переключения реостатного контроллера с позиции на позицию складываются из длительности ряда процессов, происходящих в аппарате и подчиняющихся определенному порядку - алгоритму.
Время переключения РК отсчитывают с момента подачи воздействия (питания) на катушку очередного вентиля РКI или РКII через контакты ПВ2 или ПВ3 соответственно (рис. 3). Однако включение цепи питания катушки вентиля еще не означает его срабатывания.
Время cрабатывания вентиля РК, как и любого электромагнитного устройства (например, реле), складывается из двух времен, а именно: времени трогания tтр = 130 мс, в течение которого ток в обмотке вентиля нарастает до значения тока срабатывания и начинается движение якоря, и времени движения tД = 20 мс якоря, который нажимает на клапан, открывающий доступ воздуха в цилиндр привода.
Далее происходит заполнение воздухом цилиндра привода, которое завершается в течение tэв = 100 мс. После этого начинает вращаться выходной вал привода Решетова, на котором находятся кулачковые шайбы контакторных элементов ПВ1, ПВ2, ПВ3. Одновременно через зубчатую передачу начинает вращаться главный вал контроллера, который управляет работой силовых и блокировочных контактов.
Диаграмма, отражающая последовательность замыкания и размыкания силовых и блокировочных контактов при переключениях РК с позиции на позицию (развертка РК), приведена на рис. 6.
Цифрами на диаграмме отмечены углы поворота выходного вала привода, отсчитанные от фиксированных позиций. Полный угол поворота вала при каждом переключении РК составляет 60°. Для того чтобы по заданным углам определить время от начала вращения вала до переключения контакта, нужно знать скорость вращения вала. Эту скорость будем считать постоянной и равной 0,4 град/мс.
Время переключения реостатного контроллера, которое записывают в таблицу последовательности работы системы (табл. 5), складывается из времени подготовки РК tп = tтр + tД + tэв = 250 мс и времени вращения tвр до момента замыкания или размыкания силовых или блокировочных контактов. На различных тактах работы системы это время может быть разным.
Для определения времени вращения и последующего анализа необходимо построить график замыкания и размыкания силовых и блокировочных контактов РК, а также контактов переключения вентилей (ПВ1, ПВ2 и ПВ3) в зависимости от времени. График строят для одного поворота вала аналогично диаграмме развертки, но вместо градусов откладывается время в масштабе Мt = 1 2 мс/мм. На графике нет необходимости
22
показывать все силовые и блокировочные контакты, так как времена будут повторяться. Достаточно показать работу одного силового и блокировочного контакта и контактов переключения вентилей. Времена замыкания и размыкания каждого контакта записать на графике аналогично записи углов на рис. 6.
Времена запаздывания аппаратов запишите в строке соответствующих тактов колонки 4 таблицы 5. Во избежание ошибок одновременно нужно следить за работой системы по схемам (см. рис. 2, 3 и 5). При записи времени переключения РК нужно следить за исполнением, так как времена будут различными. Учтите, что размыкание реостатных контакторов происходит без тока и не является исполнением.
На некоторых тактах переключение РК происходит одновременно с возрастанием тока при переходе (такты 37, 45, 64). В строки этих тактов записывают время переходного процесса tэп.
Время переключения на тактах 38 и 65 рассчитывают с учетом остановки РК на 0,04
с под действием РУ-П и ПВ1 по формуле: |
|
||
tрк = 0,04 |
+ 0,35 |
- 3τВ1. |
(13) |
На такте 46 учитывается начало переключения РК на такте 44 (0,04 с) и время |
|||
переключения рассчитывается из условия |
|
||
tрк = 0,35 |
+ 0,04 |
- 3τ12, |
(14) |
где τ12 – постоянная времени цепи двигателей при переходе на 12-ю характеристику, рассчитанная по формуле (10).
Длительность такта 44 определяется временем выключения контактора М.
3.6. Расчет ускорения при разгоне электропоезда на прямом горизонтальном участке пути
Для расчета приращений скорости за время срабатывания аппаратов и переходных процессов нужно знать ускорение движения поезда. Ускорение может быть определено из основного уравнения движения поезда на площадке:
|
Fэ + ωο Qg10−3 = (1+ γ )Q dV , |
(15) |
||
|
|
3,6 dt |
|
|
где Q =575 т |
– расчетная масса электропоезда, состоящего из 5 моторных и 5 |
|||
|
прицепных вагонов; |
|
||
Fэ |
– сила тяги электропоезда, определяемая из условия; |
|||
W |
– число тяговых двигателей в электропоезде; |
|
||
FД |
– сила тяги двигателя; |
|
||
ωο |
– основное удельное сопротивление движению электропоезда; впределах |
|||
|
интервала изменения скоростей, предусмотренного заданием, можно |
|||
|
принять ωο = 2,5 |
Н |
; |
|
|
|
|
||
|
|
кН |
|
|
γ = 0,06 |
– коэффициент, учитывающий инерцию вращающихся масс; |
|||
|
23 |
|
||
g = 9,81 |
м |
|
– ускорение свободного падения тела; |
|
с2 |
||||
|
|
|||
|
dV |
– ускорение поезда, км/ч·с. |
||
|
dt |
|
||
Сила тяги FД , а значит, и ускорение движения зависят от тока двигателя. В процессе
разгона электропоезда ток двигателей постоянно меняется, причем из-за разброса параметров аппаратов изменения тока двигателей отдельных вагонов происходят не синхронно. В результате средняя величина тока двигателей остается примерно постоянной и близкой к току реле ускорения. Поэтому расчетное ускорение нужно определить по силе тяги для полного возбуждения при токе Iу = 1,3Iн. Этим же значением ускорения нужно пользоваться и для расчета приращений скорости при регулировании возбуждения.
Расчетную величину силы тяги двигателей определить из управления энергетического баланса:
PД = U ДН IηНηЗН = |
FДV |
, |
(16) |
|
3,6 |
||||
|
|
|
где I = 1,3Iн; V = 0,91Vн, из таблицы 3; ηЗН = 0,975 К.П.Д. зубчатой передачи.
3.7. Анализ работы системы при реостатном регулировании
Для исследования систем с релейными элементами обычно используется либо метод фазовой плоскости, либо графоаналитический метод, который называют также методом «припасовывания». При анализе работы системы управления электропоездом мы будем пользоваться последним методом, так как он наиболее полно отвечает поставленной задаче корректировки исходной пусковой диаграммы. Принцип «припасовывания» заключается в разбиении исследуемого процесса на участки и исследовании процесса на каждом участке при начальных условиях, соответствующих полученным в конце предыдущего участка. Такими участками для рассматриваемой системы являются времена срабатывания аппаратов, переходных процессов в цепи двигателей, задержка на характеристиках до тока уставки РУ. В этой последовательности будет производиться анализ.
Ступеням реостатного регулирования соответствуют скоростные характеристики
1 - 9, 13 - 16 и такты 1 - 33, 49 - 60 на рис. 6.
На первом этапе анализа определяется приращение скорости за время срабатывания аппаратов. При реостатном регулировании это время складывается из времени отпускания якоря РУ tру и времени переключения РК tрк. Эти времена уже записаны в соответствующие строки тактов в колонку 4 табл. 5.
Затем, пользуясь полученным на предыдущем шаге расчетным ускорением, нужно определить приращение скорости V и записать его в соответствующие строки колонки 9. Приращение скорости за время отпускания реле ускорения отдельно можно не
24
рассчитывать. Когда РК работает вслед за РУ, в колонку 9 можно записать приращение скорости за два такта для суммы времени tру + tрк = 0,39 с.
Значения скоростей, соответствующих моменту окончания каждого такта, определяются из пусковой диаграммы и должны быть записаны в колонку 10. По определившимся скоростям из характеристик нужно найти величины тока двигателя, которые записать в колонку 11. Целесообразно отметить точками на характеристиках определившиеся скорости и точки для последующего построения реализуемой пусковой диаграммы.
Далее рассчитывается приращение скорости Vэп за время переходного процесса в цепи двигателей, который в табл. 5 назван для сокращения «переход». Длительность перехода tэп = 3τ, причем τ рассчитывается по формуле (10). Требуемое для его расчета значение скорости Vнач, при которой начинается переход, определено выше и уже записано в колонке 10 табл. 5.
Зная приращение скорости за время переходов, можно определить величины скорости движения и тока выхода на очередную характеристику, как показано на рис. 4. Полученные значения скорости и тока следует отметить точками на сетке характеристик и записать в колонки 10 и 11 табл. 5. Результаты расчета переходных процессов запишите в табл. 7 с точностью не более 3 знаков после запятой.
На позициях реостатного регулирования в табл. 5 остались незаполненными строки тактов задержки. Чтобы определить время задержки, нужно найти приращение скорости V3 из пусковой диаграммы, пользуясь масштабом, начиная с точки выхода на очередную характеристику до достижения тока уставки РУ. По определившемуся приращению скорости и расчетному ускорению определяется время задержки t3.
Таблица 7
Расчетная таблица приращений скорости за время перехода
Переход |
Rn+1 |
Vнач |
τ |
tэп |
Vэп |
С1 на 2 позицию
С2 на 3 позицию
С3 на 4 позицию
С4 на 5 позицию и т.д.
Полученные значения времени, приращений скорости, скорости движения и тока запишите в колонки 4, 9, 10 и 11 табл. 5 с точностью, соответствующей точности построения графика скоростных характеристик. Значения скорости округлить до 1-го знака после запятой, величину тока записывать целыми числами.
25
3.8. Анализ работы системы при регулировании возбуждения
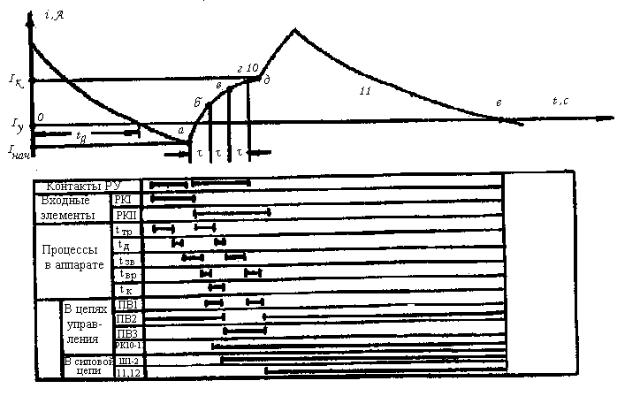
Особенность анализа работы системы при регулировании возбуждения связана с тем, что после переключения с 9-й на 10-ю позицию РК хронометрически переключается на 11- ю позицию. Аналогично, без задержки на 17-й позиции, осуществляется переключение РК и при параллельном соединении двигателей. Чтобы в этом убедиться, нужно построить график изменения тока двигателей во времени, совместив его с графиком алгоритма срабатывания аппаратов. Пример таких графиков приведен на рис. 7.
Исполнение
Рис. 7. График i(t) и график алгоритма срабатывания аппаратов
Ток в момент t = 0 графика i(t) равен току в конце такта 32. Вторая точка графика соответствует моменту снижения тока двигателя до значения Iу. Абсцисса этой точки равна времени задержки на девятой характеристике, которое рассчитано на предыдущем шаге.
Третья точка графика i(t) (точка а на рис. 7) соответствует моменту замыкания контактов Ш1-2. Эта точка отстает от момента достижения тока уставки на время, равное tру + tтр + tв + tэв + tвр + tк. По значениям этих времен (см. шаг 5) строится график алгоритма срабатывания аппаратов. Там же нужно показать переключение контактов ПВ1, ПВ2, ПВ3 на основании графика времен замыкания и размыкания аппаратов, построенного на шаге 5.
Ордината точки а - Iнач определяется из табл. 6 и соответствует току в конце такта 36 (колонка 11). До этого должны быть заполнены колонки 9-11 на тактах 33-36 так же, как это делалось на предыдущем шаге. Приращение скорости за время такта 36, на котором включается Ш1-2, можно отдельно не вычислять, а в таблицу записать суммарное V на тактах 34, 35, 36.
26

После включения Ш1-2 начинается переходный процесс возрастания тока, который подчиняется экспоненциальному закону (9), причем τ = τв1. График экспоненты строится по четырем точкам, интервалы между которыми равны τ (точки а-г на рис. 7). Для сокращения вычислительной работы можно воспользоваться численными выражениями
− t
члена (1− е τ ) для значений времени t:
t |
0 |
τ |
2τ |
3τ |
||
|
|
|
|
|
|
|
1− е− |
t |
0 |
0,632 |
0,865 |
0,95 1,0 |
|
τ |
|
|||||
|
|
|
|
|
|
|
Конечное значение тока Iк определяется так же, как и в предыдущем шаге, по известной величине tэп = 3τв1 и расчетному ускорению.
Результаты расчетов приращения скорости и точек кривой i(t) сводятся в табл. 8.
Таблица 8
Расчет переходных процессов при регулировании возбуждения
Переход |
τв |
tэп |
Vэп |
Iа |
Iб |
Iв |
Iг |
9-10
10-11
16-17
17-18
Сопоставляя построенный график i(t) с графиком алгоритма срабатывания аппаратов, можно увидеть, что контакт ПВ1 размыкается в тот момент, когда ток двигателей еще не успевает возрасти до тока уставки. Поэтому после размыкания ПВ1 якорь реле ускорения начинает отпадать. Через время tру = 40 мс замкнется контакт РУ, и через замкнутый к этому моменту контакт ПВ3 собирается цепь подачи питания на катушку РКII (см. рис. 3), начинается новый цикл переключения РК с 10-й на 11-ю позицию, который также состоит из времени движения якоря и т.д. Все эти процессы и события нужно показать на графике алгоритма срабатывания аппаратов. Из этого определится момент замыкания силовых контактов 11, 12 реостатного контроллера.
После включения контакторов 11, 12 начинается переходный процесс возрастания тока, расчет которого производится аналогично рассмотренному выше. Результаты расчета нужно свести в табл. 8. В эту же таблицу нужно свести расчеты для переходов 16-17, 17-18. График i(t) для этих переходов не строится, и промежуточные значения тока при переходе не вычисляются. Для ступеней регулирования возбуждения при параллельном соединении нужно также заполнить соответствующие строки в табл. 5 с учетом того, что длительность такта 65 равна длительности такта 38.
После окончания переходного процесса начинается такт задержки на 11-й характеристике до тока уставки РУ (точка е на рис. 7). Длительность его нужно рассчитать и записать в табл. 5.
27
3.9.Анализ работы системы при перегруппировке двигателей
ивыключении шунтирующих цепей. Реализуемая пусковая диаграмма
Втабл. 5 остались незаполненными строки тактов 41-48. Вы должны самостоятельно произвести анализ работы системы на этих тактах. Для этого нужно построить график i(t), совмещенный с графиком алгоритма срабатывания аппаратов, и произвести расчеты, аналогичные выполненным ранее. Рекомендуется продолжить график, выполненный на шаге 8.
После включения контактора П1-2 продолжается работа по характеристике ІІ. Переход на 12-ю характеристику начинается в момент выключения контактора М. Переход на 13-ю характеристику начинается в момент, когда замыкаются контакты 1, 2 РК и одновременно размыкаются контакты Ш1-2. Постоянная времени при переходах 11-12 и 12-13 рассчитывается по формуле (10).
После выполнения расчетов этого шага будут определены все точки, по которым можно построить реализуемую пусковую диаграмму с учетом времени срабатывания аппаратов и переходныхпроцессов. Нарисунке4 этадиаграммапоказанажирнымилиниями.
3.10.Анализ влияния технического состояния оборудования
на качество регулирования
Одним из показателей качества работы системы ступенчатого регулирования тока двигателей является коэффициент неравномерности пуска, который зависит от среднего значения тока при разгоне электропоезда и от величины бросков тока при переходах. Очевидно, что чем меньше средний ток, тем длительнее разгон, а чем больше броски тока, тем меньше надежность работы тяговых двигателей и механического оборудования. При выполнении расчетов и построений на предыдущих шагах Вы уже выяснили, как влияют времена срабатывания аппаратов и переходных процессов на положение пусковой диаграммы и, следовательно, на эти показатели. На данном шаге на нескольких примерах будет рассмотрено, как изменится пусковая диаграмма при отклонениях параметров аппаратов от заданных ранее.
Изменение времени срабатывания аппаратов
В результате переключения РК с 12-й на 13-ю позицию происходит два события: размыкаются контакты контактора Ш1-2 изамыкаются контакты 1, 2РК. Напредыдущем шаге расчеты производились исходя из предположения, что эти события происходят одновременно. Только в этом случае мы имели право показать на рис. 4 один бросок тока при переходе с 12-й на 13-ю характеристику, так как последняя построена для условия, что контактор ШІ-2 отключен и контакты 1,2 замкнуты. Используя знак инверсии для обозначения разомкнутого состоянияконтакта, этоусловиебудемзаписыватьввидеШ1-2 и1,2.
На практике одновременное включение контактора Ш1-2 и включение контактов 1,2РК происходит очень редко. Для этого должны совпасть время отключения контактора Ш1-2 с временем вращения вала РК от момента размыкания блокировки
28

РК10-12 до момента замыкания силовых контактов 1, 2. Если условие одновременности не выполняется, то переход с 12-й на 13-ю характеристику будет происходить в два этапа, а характер изменения тока на каждом этапе будет определяться последовательностью переключения контакторов. Рассмотрим два возможных варианта этой последовательности.
Если первыми разомкнутся контакты Ш1-2, то ток двигателей при этом будет уменьшаться. Значение, до которого ток уменьшится, определяется положением скоростной характеристики, соответствующей условию Ш1-2 и 1,2. После замыкания контакторов 1,2РК ток будет увеличиваться до значения, определяемого положением скоростной характеристики 13-й позиции.
При втором варианте последовательности ток двигателей сначала увеличивается в результате замыкания контактов 1,2 РК (условие Ш1-2 и 1, 2), а затем уменьшается после отключения Ш1-2.
Координаты точек промежуточных скоростных характеристик для двух рассмотренных вариантовпоследовательности переключенияконтактовШ1-2 и1,2РКприведенывтабл. 9.
Вы должны пересчитать относительные значения тока и скорости в абсолютные и построить характеристики на рисунке 4. На этом рисунке нужно показать изменения пусковой диаграммы для двух вариантов:
1.Контактор Ш1-2 выключен на 40 мс раньше включения контакторов 1, 2.
2.Контактор Ш1-2 выключен на 40 мс позже включения контакторов 1, 2.
Таблица 9
Координаты точек вариантов промежуточных характеристик
|
|
То двигателя І/Іп |
1,0 |
1,3 |
1,6 |
2 |
Скорость движения при условии: |
|
|
|
|
||
Ш1-2; 1, |
2 |
( выключены) |
|
|
0,30 |
|
0,63 |
0,45 |
0,14 |
||||
Ш1-2; 1, |
2 |
( включены) |
1,05 |
0,82 |
0,65 |
0,52 |
На построенных на предыдущем шаге графиках нужно показать разными цветами для каждого из приведенных вариантов изменение графика i(t) и графика алгоритма срабатывания аппаратов. Этими же цветами нужно показать изменение пусковой диаграммы. Расчеты, которые потребуется произвести для этих построений, нужно отобразить при оформлении шага. Характер изменения тока при переходах можно показать ориентировочно, т.е. промежуточные точки кривой i(t) можно не рассматривать. По результатам анализа сделайте выводы, какой из вариантов последовательности переключения контактов 1, 2 и Ш1-2 предпочтительнее.
Отказ цепи подъемной катушки
Без подъемной катушки якорь реле ускорения может быть притянут при условии, если ток силовой катушки достигает тока притяжения, который определяется из условия:
29
Iпр = |
IY |
, |
|
||
|
KB |
|
где Кв = 0,8.
При броске тока до величины Ік< Іпр контакт РУ остается замкнутым, и после замыкания контакта ПВ2 (ПВ3) начнется цикл переключения РК на следующую позицию.
На рис. 4 нужно показать изменение пусковой диаграммы для случая нарушения нормальной работы подъемной катушки РУ при переключении РК с 13-й на 15-ю позицию.
Кроме того, нужно построить график i(t) и график алгоритма работы аппаратов для данного случая. При этом необходимо рассчитать Іпр и сделать вывод, будет ли задержка на 15-й характеристике.
3.11.ВЫВОДЫ
Взаключении напишите выводы о влиянии динамических процессов в аппаратах и в объекте управления на работу системы. Поясните, как изменится работа системы, если увеличить или уменьшить число моторных вагонов в поезде, как изменится пусковая диаграмма при разгоне электропоезда на спуске и на подъеме, каковы будут последствия этих изменений.
4.ПОРЯДОК ВЫПОЛНЕНИЯ ПРОЕКТА
ИСОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
Шаг 1.
-Таблица алгоритма управления электропоездом.
-Силовая схема и схема цепей управления. На схемах обозначить все контакты. Обозначение согласовать с функциональной схемой, показанной на рис. 5. На схеме управления показать (+) и (-) цепей управления.
Шаг 2.
-Расчет номинального тока двигателя.
-Расчетная таблица и график скоростных характеристик двигателя.
-Расчет сопротивления обмоток двигателя.
-Расчет сопротивления реостата на первой позиции, таблица сопротивления секций реостата, заполненная колонка параметра в таблице алгоритма управления электропоездом.
Шаг 3.
-Исходная пусковая диаграмма, изображенная на графике скоростных характеристик тонкими линиями.
-Таблица последовательности работы системы управления электропоездом во времени с заполненными колонками 5-8 на тактах 49-67.
-Функциональная схема системы управления электропоездом во времени с заполненными колонками 5-8 на тактах 49-67.
30