

Лаб работа Автоматика2
.pdfМинистерство образования Республики Беларусь
Учреждение образования «МОГИЛЕВСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ПРОДОВОЛЬСТВИЯ»
Кафедра автоматизации технологических процессов и производств
Автоматика, автоматизация производственных процессов и АСУТП
Методические указания
к выполнению лабораторного практикума для студентов технологических и механических специальностей
Часть 2
Могилев 2006
1
УДК 681.5(076.5) Рассмотрены и утверждены
на заседании кафедры автоматизации технологических процессов и производств Протокол № 9 от 3.05.2006
Составители: |
к.т.н., доцент Никулин В.И. |
|
ассистент Лоборева Л.А. |
|
ст. преподаватель Богуслов С.В. |
Рецензент |
старший преподаватель |
|
Сизенов В.А. |
© УО «Могилевский государственный университет продовольствия»
2
СОДЕРЖАНИЕ |
|
1 Лабораторная работа №9. Исследование непрерывной АСР |
4 |
расхода жидкости |
|
2 Лабораторная работа № 10. Исследование автоматической |
10 |
системы двухпозиционного регулирования |
|
3 Лабораторная работа № 11. Аналого-цифровое преобразование |
17 |
(АЦП) |
|
4. Лабораторная работа №12. Применение интегральных схем |
21 |
5 Лабораторная работа №13. Аналоговое измерение температуры |
26 |
и преобразование результатов измерения в цифровой сигнал |
|
3

1 Лабораторная работа №9. Исследование непрерывной АСР расхода жидкости
Цель работы: Изучение принципов построения одноконтурных автоматических систем регулирования на базе регуляторов непрерывного действия; экспериментальное исследование влияния параметров настройки ПИрегулятора на качество работы АСР.
1.1 Общие сведения
Структурная схема одноконтурной АСР, работающей «по отклонению», приведена на рисунке 1.1.
|
|
Z |
|
|
|
|
Y |
РО |
|
ОР |
|
|
|
||
|
|
|
|
Д
X
ИМ  АР
АР  ВП
ВП
 Y3
Y3
ЗУ
Рисунок 1.1 - Структурная схема одноконтурной АСР
На объект регулирования ОР действуют возмущающее (Z) и управляющее (Х) воздействия, которые приводят к изменению его выходной величины (Y), измеряемой датчиком Д.
Величина сигнала от датчика Д сравнивается с ее заданным значением Yз, вырабатываемым задающим устройством ЗУ. В зависимости от величины и знака отклонения (Y– Yз) автоматический регулятор в соответствии со своим законом регулирования вырабатывает регулирующее воздействие Х, которое преобразуется исполнительным механизмом ИМ в перемещение регулирующего органа РО. Регулирующий орган изменяет количество вещества или энергии, проходящее через объект регулирования ОР таким образом, чтобы ликвидировать отклонение регулируемого параметра от его заданного значения. В АСР может быть включен вторичный прибор ВП, преобразующий сигнал измерительной информации датчика Д в показание своего отчетного устройства. Описанные элементы АСР могут конструктивно объединяться друг с другом в одно устройство. Так, например, вторичный прибор ВП может иметь встроенное устройство ЗУ или исполнительный механизм может быть объединен с регулирующим органом.
В зависимости от вида Yз непрерывные АСР делятся на стабилизирующие (Yз = const) , программные (Yз - заданная функция времени) и следящие (Yз заранее не задается, а меняется при изменении некоторого
4
«ведущего» параметра , связанного с работой данного объекта регулирования). Законом регулирования называется зависимость вида
Х = f(Y - Yз) |
(1.1) |
По закону регулирования регуляторы непрерывного действия делят на пропорциональные (П-), интегральные (И-), пропорционально-интегральные (ПИ-), пропорционально-дифференциальные (ПД-), пропорционально- интегрально-дифференциальные (ПИД-) .
Уравнение динамики (закон регулирования) ПИД-регулятора имеет вид:
1 t
Х Кр(Y Yз) Ти 0 (Y Yз)dt
где Кр - коэффициент передачи регулятора, Ти - время интегрирования , Тд - время дифференцирования.
Tд |
d(Y Yз) |
, |
(1.2) |
|
|||
|
dt |
|
|
Подставив в формулу (1.2) Тд = 0 получим закон регулирования ПИрегулятора; при Ти = ∞ - закон ПД-регулятора. Коэффициенты Кр, Ти и Тд являются настроечными параметрами регуляторов непрерывного действия. Введением той или иной составляющей в законе регулирования, а также подбором настройки регулятора можно добиться требуемого качества работы АСР.
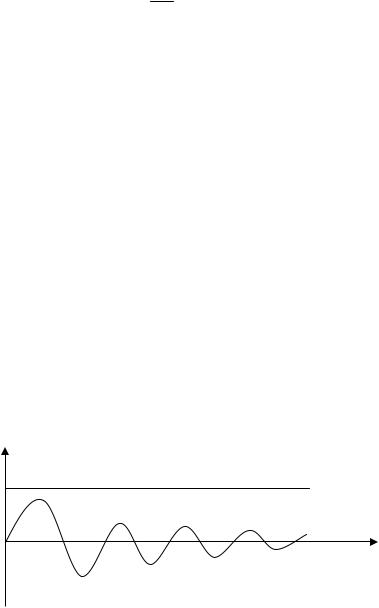
Переходным процессом в АСР называется изменение во времени выходной величины Y от момента появления возмущающего или задающего воздействий до прихода системы в новое установившееся состояние. Вид переходного процесса зависит от динамических свойств системы, определяемых динамическими свойствами самого объекта регулирования и автоматического регулятора, начальных условий, а также от величины и формы входных воздействий. Переходные процессы в системе могут возникать при изменении возмущающего воздействия или заданного значения регулируемой величины Yз ( рисунки 1.2 и 1.3).
Y, Z
Z
t
Рисунок 1.2 - Переходный процесс в АСР при изменении возмущающего воздействия
5
Y
Yз
t
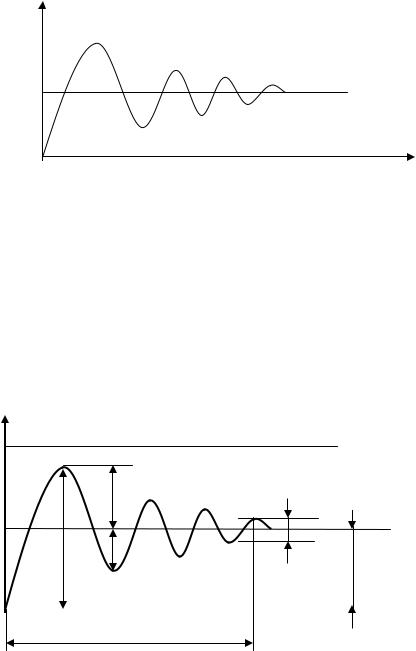
Рисунок 1.3 - Переходный процесс в АСР при изменении задающего воздействия
Качество переходного процесса (или качество работы АСР) определяется по показателям, которые характеризуют отклонение реального переходного процесса от желаемого. Они показывают, насколько точно и как быстро после нанесения единичного ступенчатого воздействия ( при нулевых начальных условиях ) в системе устанавливается равновесное состояние. Количественно качество переходного процесса оценивается следующими показателями (рисунок 1.4 ):
Z,Y |
|
Z |
|
|
|
|
Y1 |
|
|
ε |
Yс |
Y∞ |
|
|
|
|
Y2
Yд
Y3  t
t
Тр
Рисунок 1.4 - Показатели качества переходного процесса в АСР (при ступенчатом изменении Z, Уз = 0)
- статическая ошибка регулирования Yс – это рассогласование между установившимся значением регулируемой величины и заданным значением Уз :
Yс = Y∞ - Уз; |
(1.3) |
-динамическая ошибка регулирования Уд – максимальное отклонение регулируемой величины в переходном процессе от ее заданного значения;
-время регулирования Тр – это промежуток времени, в течение которого регулируемая величина достигает нового установившегося значения с заранее установленной точностью;
6
- перерегулирование σ – это выраженное в процентах отношение второй и первой амплитуд колебания регулируемой величины, направленных в противоположные стороны :
σ = (Y2 / Y1) 100% ; |
(1.4) |
- интегральная квадратическая ошибка регулирования характеризует разброс значений регулируемой величины от нового установившегося значения
Y∞:
|
|
|
J |
(Y -Y )2 dt . |
(1.5) |
0 |
|
|
Чем меньше статическая и динамическая ошибка регулирования, тем выше качество переходного процесса или качество работы АСР.
С усилением воздействия регулятора на объект регулирования переходный процесс, возникающий в системе, от апериодического (неколебательного) начинает все больше видоизменяться в сторону затухающего колебательного, вплоть до гармонического колебательного процесса. Из устойчивых (сходящихся или затухающих) переходных процессов в качестве оптимальных с точки зрения требований технологии выбирают один из трех типовых процессов:
1)граничный апериодический процесс характеризуется отсутствием перерегулирования (σ = 0), минимальным общим временем регулирования Тр и максимальным по сравнению с другими типовыми переходными процессами динамической ошибки Yд;
2)процесс с 20 %-м перерегулированием: динамическая ошибка Yд уменьшается, время регулирования Тр возрастает;
3)процесс с минимальной квадратичной ошибкой регулирования: динамическая ошибка Yд минимальная ( из рассмотренных процессов ), время регулирования Тр, максимальное перерегулирование σ – также наибольшее
(40%).
1.2Описание объекта исследования
Функциональная схема непрерывной АСР, изучаемой в данной работе, приведена на рисунке 1.5. Объектом регулирования является участок трубопровода 1 ; регулируемой величиной Y - расход воды, проходящей через этот трубопровод; возмущающим воздействием Z – изменение расхода воды с помощью вентиля 2; управляющим воздействием Х – расход воды через клапан 1д с мембранным исполнительным механизмом, управляемым автоматическим регулятором 1г. Фактический расход воды в объекте измеряется прибором переменного перепада давления.
С диафрагмы 1а сигнал поступает в измерительный преобразователь разности давлений 13Д.Д11,преобразующий перепад давлений в стандартный пневматический выходной сигнал давлением 20-100 кПа. Сигнал
7

измерительной информации от преобразователя 1б поступает на вход вторичного прибора 1в (прибор контроля пневматический самопишущий ПВ10.1Э, шкала 0-100%,класс точности 1,0), преобразующий его в показания своего отсчетного устройства. Прибор имеет встроенный задатчик (давление сжатого воздуха, имитирующего заданные значения регулируемой величины, находится в пределах 20-100 кПа), а также дополнительную шкалу для указания давления сжатого воздуха на исполнительном механизме клапана 1д. Задатчик входит в станцию управления прибора ПВ10.1Э, обеспечивающего возможность трехрежимного ведения процесса: ручного управления, автоматического стабилизирующего регулирования и автоматического программного регулирования (при наличии программного задатчика). Конструкцией прибора ПВ10.1Э предусмотрено присоединение автоматического регулятора (в данной работе ПИ-регулятора) к задней панели прибора.
1 |
2 |
FE |
вода |
1a |
|
 1д
1д
FС |
FIRК |
FT |
1г |
1в |
1б |
Рисунок 1.5 - Функциональная схема непрерывной АСР расхода жидкости:
1а – диафрагма; 1б – преобразователь разности давлений 13Д.Д11; 1в – прибор контроля пневматический ПВ.10.1Э;
1г – регулятор ПР3.21;
1д – исполнительный механизм с регулирующим органом
Закон работы ПИ-регулятора имеет вид:
Õ Êð(Y -Yз) |
1 |
(Y -Yз)dt. |
(1.6) |
|
Ти |
||||
|
|
|
Коэффициент передачи Кр и время интегрирования Ти являются настроечными параметрами ПИ-регулятора. При этом вместо Кр используется обратная величина, называемая пределом пропорциональности и выраженная в процентах:
δ = 1/Кр·100%. |
(1.7) |
Установка Ти производится ручками |
настройки (при снятой крышке |
регулятора) в пределах Ти = 0,05 мин. Выбор режима работы осуществляется с помощью клавишных переключателей, расположенных на лицевой панели прибора ПВ10.1Э. При автоматическом стабилизирующем регулировании должны быть нажаты клавиши «ВКЛ» и «А», при этом величина
8
устанавливается ручкой задатчика, расположенной также на лицевой панели прибора ПВ10.1Э. При ручном дистанционном управлении исполнительным механизмом нажаты клавиши «ОТКЛ» и «Р», автоматический регулятор при этом отключен от АСР, а давление воздуха на исполнительный механизм регулирующего клапана устанавливается ручкой задатчика прибора ПВ10.1Э.
Вторичный прибор имеет три шкалы: по левой шкале отсчитывается текущее значение регулируемой величины (в данном случае фактический расход воды в трубопроводе), по средней шкале устанавливается заданное значение регулируемой величины, и правая шкала служит для отсчета давления воздуха на исполнительном механизме 1д.
1.3 Задание на выполнение работы
1) Ознакомиться с принципом построения непрерывных АСР на примере замкнутой АСР расхода жидкости в трубопроводе.
2) Экспериментально исследовать влияние настроечных параметров ПИрегулятора.
1.4 Методика выполнения работы
Исследование влияния параметров настройки ПИ-регулятора на качество работы непрерывной АСР предполагает снятие переходных процессов в системе при нанесении возмущающего воздействия (изменение расхода воды) или изменения задания автоматическому регулятору при различных значениях настроек, определение из графиков переходных процессов параметров, характеризующих качество регулирования (статическая и динамическая ошибки, время регулирования и т. д.) и сравнительную оценку этих параметров.
Текущее значение регулируемой величины определяется при этом по шкале вторичного прибора ПВ10.1Э, текущее время - по секундомеру, включаемому при подаче возмущения или изменения задания регулятору.
Заданное значение регулируемой величины, диапазон варьирования настроечных параметров автоматического регулятора, величина возмущающего воздействия задаются преподавателем.
1.5 Порядок выполнения работы
Подайте питание на пневматические приборы лабораторного стенда, включив компрессор на линии сжатого воздуха. Манометр редуктора давления с фильтром осуществляет очистку и автоматическую стабилизацию давления воздуха и должен показывать 140 кПа. При необходимости отрегулируйте его с помощью РД-2291. Откройте вентиль, размещенный перед исполнительным механизмом.
Нажмите клавиши «ОТКЛ» и «Р» прибора ПВ10.1Э. При этом регулятор ПРЗ.21 отключен, а исполнительным механизмом регулирующего клапана 1д управляет задатчик (режим ручного дистанционного управления); ручкой задатчика добейтесь заданного расхода в трубопроводе. Нажмите клавишу «А» (клавиша «ОТКЛ» по-прежнему нажата). Следя по шкалам задания и
9
переменной, установите давление задания равное переменной. Нажмите клавишу «Вкл», передав тем самым управление расходом воды в трубопроводе автоматическому регулятору. Ручками настройки автоматического регулятора установите заданные значения настроечных параметров. Измените задание автоматическому регулятору задатчиком прибора ПВ10.1Э, включите секундомер и запишите значения регулируемой величины через заданные промежутки времени до завершения переходного процесса, т.е. до достижения нового установившегося режима работы объекта регулирования. По завершении экспериментальной части работы нажмите клавишу «ОТКЛ» и прикройте вентиль 2. Отключите подачу сжатого воздуха на стенд. Постройте переходные процессы в АСР на миллиметровке, определите по ним параметры, характеризующие качество автоматического регулирования.
1.6 Требования к отчету
Отчет по данной работе должен содержать:
1)цель работы;
2)функциональную схему АСР расхода жидкости в трубопроводе и ее краткое описание;
3)графики переходных процессов в АСР с указанием заданных параметров (Yз, δ, Ти) и параметров качества регулирования;
4)выводы по работе.
1.7 Контрольные вопросы
1)Приведите структурную схему непрерывной АСР. Какие элементы в нее входят и каково их назначение?
2)Чем отличаются стабилизирующие, программные и следящие системы автоматического регулирования?
3)Что называется законом регулирования?
4)Приведите законы регулирования П-, ПИ-, ПД-, и ПИДрегуляторов.
5)В каких случаях в АСР могут возникать переходные процессы?
6)Какие параметры характеризуют качество работы АСР? Как их определить из графика переходного процесса?
7)Типовые переходные процессы в АСР и их характеристика.
2 Лабораторная работа № 10. Исследование автоматической системы двухпозиционного регулирования
Цель работы: Изучение позиционного закона регулирования на примере автоматической системы двухпозиционного регулирования температуры; анализ влияния параметров системы на качество двухпозиционного регулирования.
2.1 Общие сведения
Простейшая система двухпозиционного регулирования может быть представлена в виде последовательного соединения позиционного регулятора
10