

4. Синтез и анализ кулачкового механизма.
4.1. Цели и задачи четвёртого листа.
При выполнении четвёртого листа основной задачей является построение профиля кулачка. В качестве основного условия используют заданный закон движения колебателя. В качестве дополнительных условий используют:
в кулачковых механизмах, работающих по плоскому толкателю – условие выпуклости профиля кулачка;
для кулачковых механизмов, работающих по роликовому толкателю (колебателю) – ограничение угла давления.
4.2. Применение кулачковых механизмов.
Рабочий процесс многих машин вызывает необходимость иметь в их ставе механизмы, движение выходных звеньев которых должно быть выполнено строго по заданному закону и согласовано с движением других механизмов. Наиболее простыми, надёжными и компактными для выполнения такой задачи являются кулачковые механизмы. Воспроизведение движения выходного звена - толкателя (колебателя), они осуществляют теоретически точно. Их входное звено называется кулачком.
Закон движения толкателя (колебателя), задаваемый передаточной функцией, определяется профилем кулачка и является основной характеристикой кулачкового механизма, от которой зависят его функциональные свойства, а также динамические и вибрационные качества.
Проектирование кулачкового механизма подразделяется на ряд этапов: назначение закона движения толкателя (колебателя); выбор структурной схемы; определение основных и габаритных размеров; расчёт координат профиля кулачка.
Общее представление о кинематических схемах кулачковых механизмов можно получить на примере газораспределительных механизмов двигателей внутреннего сгорания. Эти механизмы служат для открытия и закрытия клапанов, что позволяет наполнять цилиндры двигателя горючей смесью (или воздухом), выпускать отработанные газы и надёжно изолировать камеру сгорания от окружающей среды во время тактов сгорания и рабочего хода. Кулачковые механизмы также широко применяются в текстильных машинах, приборах и особенно в машинах-автоматах.
Преимущества кулачковых механизмов:
способность воспроизводить движение ведомого звена по самым сложным законам. Например: с длительными остановками ведомого звена при непрерывном движении ведущего.
Недостатки:
наличие высшей кинематической пары, а значит больших удельных давлений и большого износа кулачка, поэтому для кулачков осуществляют цементацию.
необходимость силового замыкания кулачковой пары, которое осуществляется при помощи пружин.
Все кулачковые механизмы (с вращающимся кулачком) делятся на две группы:
а) работающие по толкателю (толкатель – звено, совершающее поступательное движение);
б) работающие по колебателю (колебатель – звено, имеющее вращательное движение).
Кроме того, кулачковые механизмы могут быть плоскими и пространственными.
Плоские – звенья перемещаются в одной или параллельных плоскостях.
Пространственные - звенья перемещаются в пересекающихся плоскостях.
Ведомое звено кулачковых механизмов может заканчиваться остриём, роликом или плоскостью.
Дезоксиальным –
называется
механизм,
в котором направляющая толкателя смещена
относительно оси вращения кулачка.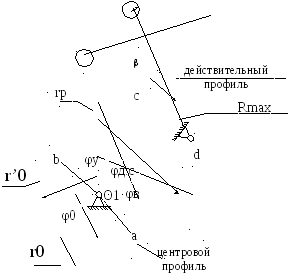
Схема кулачкового механизма с роликовым колебателем.
Минимальный радиус кулачка r0 – радиус-вектор, соединяющий центр вращения кулачка с ближайшей точкой профиля кулачка.
Максимальный радиус кулачка Rmax – радиус-вектор, соединяющий центр вращения кулачка с самой далёкой точкой профиля кулачка.
Максимальный
подъём колебателя
 - максимальный угол подъёма колебателя
в результате совершения вращательного
движения кулачка.
- максимальный угол подъёма колебателя
в результате совершения вращательного
движения кулачка.
Нерабочий угол
кулачка (нерабочая фаза)
 - центральный угол, опирающийся на дугуab
минимального радиуса. При скольжении
по дуге минимального радиуса толкатель
неподвижен и находится в нижнем положении.
- центральный угол, опирающийся на дугуab
минимального радиуса. При скольжении
по дуге минимального радиуса толкатель
неподвижен и находится в нижнем положении.
Угол удаления
(фаза удаления)
 -
центральный угол кулачка, опирающийся
на дугуbc
, соединяющую крайние точки дуг
минимального и максимального радиусов
кулачка. При скольжении по этой дуге
колебатель приходит в движение и
удаляется на максимальное расстояние
(переходит от нижнего в верхнее положение).
-
центральный угол кулачка, опирающийся
на дугуbc
, соединяющую крайние точки дуг
минимального и максимального радиусов
кулачка. При скольжении по этой дуге
колебатель приходит в движение и
удаляется на максимальное расстояние
(переходит от нижнего в верхнее положение).
Угол дальнего стояния (фаза дальнего стояния) φд.с – центральный угол кулачка, опирающийся на дугу cd максимального радиуса. Пока толкатель скользит по данной дуге, он неподвижен и находится на максимальном расстоянии от центра вращения кулачка.
Угол возврата (фаза возврата) φв – центральный угол кулачка, опирающийся на дугу da, соединяющую крайние точки дуг максимального и минимального радиусов кулачка. При скольжении по данной дуге толкатель возвращается из дальнего в исходное (нижнее) положение.
Рабочий угол
кулачка (рабочая фаза) φр
– центральный
угол кулачка, равный сумме углов удаления,
дальнего стояния и возврата
 .
.
Сумма всех углов должна быть равна 360о:

Радиус профиля кулачка – радиус дуги, соответствующий фазе удаления (или возврата). Если кривая, соответствующая фазе удаления (или возврата), не является дугой окружности, то радиус профиля кулачка в этом случае будет переменным.