

Работа формирователей импульсов фи1 и фи2: состояние элементов схемы до момента отпирания транзистора v15:
-
транзистор V17 открыт (насыщен) за счет тока базы, проходящего через резистор R14;
-
ток в светодиоде оптрона V1 отсутствует, так как падение напряжения на насыщенном транзисторе V17 меньше порогового напряжения светодиода оптрона (0,8 В);
-
транзистор V19 заперт, ток управления тиристора V1 равен нулю;
— конденсатор С6 заряжен до напряжения U2 через R12.
В момент отпирания транзистора V15 напряжение конденсатора С6 оказывается приложенным плюсом к эмиттеру транзистора V17 и последний запирается. Далее отпирается транзистор V19 и тиристор V1.
Конденсатор С6 разряжается по цепи: открытый транзистор V15, источник питания с диодным мостом V7, резистор R14. Через интервал времени около 1 мс процесс разряда почти заканчивается и транзистор V17 возвращается в открытое состояние. Запирается транзистор V19, ток управления тиристора становится равным нулю.
Длительность импульса (tH) тока управления определяется параметрами элементов С6 и R14. Обычно tH « 1 мс, или 18 эл. градусов. Амплитуда импульса (Iу) зависит от напряжения U3 и сопротивления резистора R13.
Узел задания скорости включает в себя выпрямитель V6, конденсатор фильтра С1, стабилитроны V8, V9, балластный резистор R3, потенциометры R1, R2. Потециометром R2 задается минимальная (толчковая, заправочная) скорость двигателя, а потенциометром R1 - рабочая скорость. Плавный разгон обеспечивается RС-цепочкой (R4, СЗ). Резистор R5 и контакт КM служат для быстрого разряда СЗ при нажатии кнопки «Стоп». Интенсивность нарастания напряжения задания скорости U3C определяется постоянной времени Т= R4C3, а время разгона равно ЗТ. Когда напряжение Uсз достигнет значения, чуть большего, чем напряжение задания U3, диод V10 отпирается, рост Uсз прекращается и скорость двигателя фиксируется.
☻ 31. Разомкнутая САУ ЭП постоянного тока с ОС по ω. Работа схемы. Уравнения эл/мех х-ки.
двигатель постоянного тока М, питаемый от преобразователя П, усилитель-регулятор скорости У, датчик скорости — тахогенератор ТГ и потенциометр задания скорости R1.
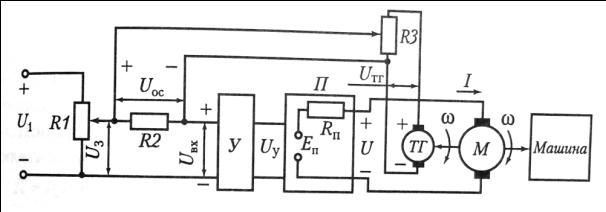
Рис. 4.22. Функциональная схема замкнутой САУ ЭП с обратной связью по скорости двигателя
Если преобразователь П тиристорный или транзисторный, то в его состав входит и система управления силовыми полупроводниковыми приборами. Входное напряжение преобразователя - Uу (от силовых полупроводниковых приборов преобразователя), выходное – ср. значение выпрямленного напряжения за период в режиме холостого хода (эдс преобразователя). Эта величина имеет обозначение Ud= Еп.
Вид
зависимости Еп
(или
Ud)
от
Uу
определяется
схемами силовой части и системы управления
преобразователем. В случае трехфазной
симметричной схемы и синусоидального
опорного напряжения эта зависимость
линейна. В других случаях имеется
некоторая нелинейность, однако будем
считать, что в статическом режиме![]() ,
где kп-
коэффициент передачи преобразователя.
,
где kп-
коэффициент передачи преобразователя.
ДПТ в статическом режиме х-ся эл/мех. характеристикой. при Ф=const: ω=(1/с)(U-IRя)
где UиI— средние значения напряжения на якоре и тока якоря за период; с — постоянная двигателя.
Если
двигатель питается от тиристорного
преобразователя,
то при малых
нагрузках на валу и работе в зоне малых
скоростей
ток якоря имеет
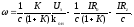
прерывистый характер. Уравнение для
преобразователя и
двигателя
принимают в виде![]()
для
поддержания скорости при увеличении
нагрузки необходимо автоматически
увеличивать напряжение преобразователя.
Это и достигается введением жесткой
отрицательной обратной связи по скорости.
Uвх=Uз-Uос
Если нагрузка на валу двигателя
увеличивается, его скорость
уменьшается,
уменьшаются напряжение тахогенератора
и напряжение обратной связи, входное
напряжение увеличивается, а это приводит
к увеличению напряжений на выходе
усилителя и на якоре двигателя. В
результате переходного процесса
негулирования устанавливается скорость,
близкая к той, которая имела место до
увеличения нагрузки.
![]() ,
,![]() ,
,![]() ,
,
Эл/мех х-ка в замкнутой системе:
![]()
☻ 32. Электромеханическая постоянная времени ЭП. Определение жесткости ЭМХ.
Электромеханическая постоянная времени ЭП, характеризует интенсивность протекания переходного процесса. ЭМП ЭП – это время, в течение которого ЭП, обладающий моментом инерции J, разгоняется от неподвижного состояния до угловой скорости идеального холостого хода под действием неизменного момента, равному моменту короткого замыкания (начальному пусковому моменту Мп).
Рассмотрим процесс разгона двигателя постоянного тока при Еп = const и М=const. Продлим механическую характеристику до пересечения с осью абсцисс (а) и назовем Мкз моментом короткого замыкания: Мкз = с*Iкз, где Iкз=Еп/R.
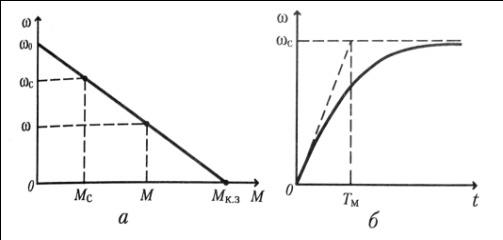
Кроме того, ω0=Еп/с.
Жесткость механической характеристики можно выразить несколькими способами:
![]()
Уравнение
движения привода
Заменим
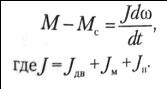
в уравнении движения приводам М![]() и после преобразований получим
и после преобразований получим
![]()
Рассмотрим
правую часть этого уравнения:
![]()
Введем
обозначение![]()
Итак, правую часть исходного дифференциального уравнениям но заменить выражением ωс/Тм.
Преобразуем
второй член:
![]()
Таким
образом, дифференциальное уравнение
для процесса разгона получило вид![]()
Его
решение с учетом начального условия
(t=0,
ω=0) имеет вид:
![]()
Скорость нарастает по экспоненциальному закону с постоянной времени Тм и стремится к омега с (б)
Электромеханическими характеристиками (ЭМХ) двигателя называются зависимости установившейся частоты вращения от тока – n = f (I) или ω = f (I)
жесткость ЭМХ определяет величину наклона естественной ЭМХ. Величина β зависит от сопротивления якорной цепи и магнитного потока возбуждения.
☻ 33. Передаточная функция ДПТ и регулятора скорости с ПИ-законом регулирования.
Передаточная
функция – отношение изображений по
Лапласу выходной величины к входной
при нулевых начальных условиях. Так,
для цепи R
– L,
подключенной к источнику
напряжения u(t) имеем:
![]() или,
заменив
или,
заменив ![]() на р, u(t) на u(p) и i(t) на i(p) и
решив уравнение относительно i(p),
принятом за выходную величину,
получим
на р, u(t) на u(p) и i(t) на i(p) и
решив уравнение относительно i(p),
принятом за выходную величину,
получим
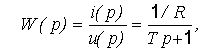 где
где ![]() –
постоянная времени.
–
постоянная времени.
Для двигателя постоянного тока независимого возбуждения с учетом индуктивности якорной цепи Lя при питании якоря от источника напряжения u(t) и kФ = с, приняв за выходную величину w(t) и за входную u(t) после перехода к изображениям, получим для случая Мс = 0 структурную схему на рис. 5.25,а.
Проделав
элементарные преобразования, будем
иметь передаточную функцию двигателя
в виде колебательного звена (рис.
5.25,б):
 ,
а)
,
а)
 б)
в)
Рис.5.25.
Передаточные функции двигателя
постоянного тока независимого
возбуждения
б)
в)
Рис.5.25.
Передаточные функции двигателя
постоянного тока независимого
возбуждения
Реальные ПИ-регуляторы тепловых процессов имеют два вида функциональных схем (рис. 4). В первом варианте (рис. 4, а) сервопривод охватывается отрицательной обратной связью (ООС) и его характеристика не влияет на формирование закона регулирования, целиком определяемого характеристикой устройства обратной связи. Во втором варианте (рис. 4, б) сервопривод не охватывается обратной связью, и ПИ-закон регулирования формируется охватом обратной связью только усилителя Ку. При этом динамические характеристики регулятора в целом определяются динамическими свойствами цепи, состоящей из последовательно включенных замкнутого контура (Ky—Wo.c) и сервопривода. Оба варианта структурных схем ПИ-регуляторов используются в их промышленных исполнениях.
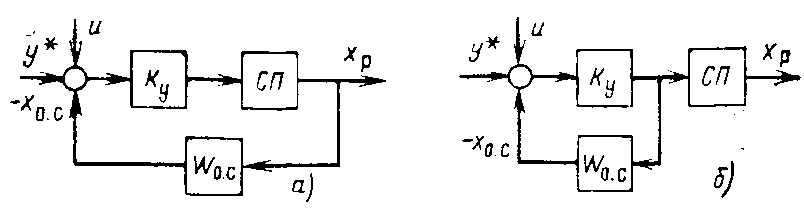
Рис. 4. Структурные схемы ПИ-регуляторов:
а — сервопривод охвачен ООС; б — сервопривод не охвачен ООС
В первом варианте устройство обратной связи должно иметь динамическую характеристику реального дифференцирующего звена
![]()
В этом случае регулятор в целом независимо от типа сервопривода воспроизводит динамику ПИ-регулятора

![]()
Если принять Тд=Ти и Kр=1/Kд, получим
![]()
т.е. передаточную функцию ПИ-регулятора, описываемого также дифференциальными уравнениями
![]() и
и

![]()
В промышленных ПИ-регуляторах в качестве обратных связей используют различные устройства: электрические, пневматические и гидравлические. Но все они служат аналогами реального дифференцирующего звена, имеют соответствующие ему динамические характеристики, и называются устройствами гибкой или упругой (изменяющейся во времени) обратной связи.
При втором варианте исполнения ПИ-регулятора (рис. 4, б) возможны два случая: 1) сервопривод имеет характеристику интегрального звена (например, электрический или гидравлический сервопривод с переменной скоростью); 2) сервопривод обладает характеристикой пропорционального звена (мембранный сервопривод с уравновешивающей пружиной). В обоих случаях в соответствии с правилом определения результирующей характеристики двух последовательно включенных звеньев
Wp(p) = WКУУ(p)Wс.п(p), (3.3)
где WКУУ(p) = 1 ⁄ Wо.с (р).
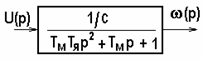
При использовании сервопривода с передаточной функцией интегрального звена Wс.п(p) = 1⁄ TР передаточная функция регулятора имеет вид
![]()
![]()
При этом для формирования ПИ-закона с помощью устройства обратной связи необходимо, чтобы выдерживалось соотношение
1/Wо.с(р) = WКУУ(р) = Kр (1+TР) (3.5)
что обеспечивает обратная связь с оператором
Wо.с(р) = Kо.с/(1+TР) = д/(1+TР) (3.6)
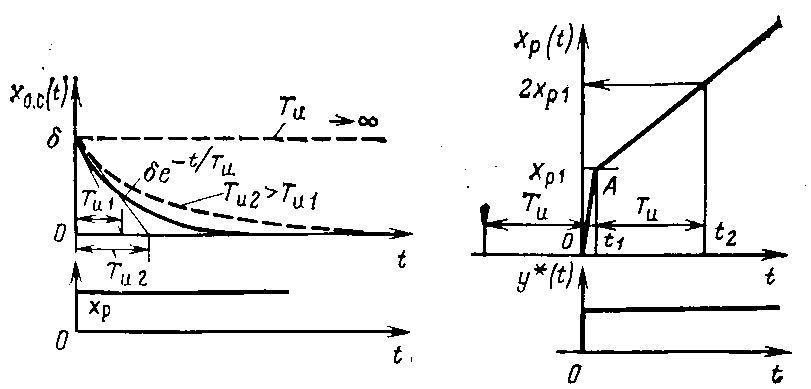
Рис. 5. Переходный процесс в устройстве Рис. 6. Переходный процесс ПИ-регулятора обратной связи
34. Структурная схема и передаточная функция САУ ЭП с ОС по ω. Устойчивость САУ
В состав схемы эп постоянного тока с обратной связью по скорости входят двигатель постоянного тока М, питаемы от преобразователя П, усилитель-регулятор скорости У, датчик скорости-тахогенератор Тг и потенциомер скорости R1.
Если преобразователь П тиристорный или транзисторный, то в его состав входит и система управления силовыми полупроводниковыми приборами. Входным напряжением преобразователя Uу будем считать напряжение, подаваемое на систему управления силовыми полупроводниковыми приборами преобразователя. В качестве выходного напряжения преобразователя примем среднее значение выпрямленного напряжения за период в режиме холостого хода, которое будем называть эдс преобразователя. Эта величина имеет обозначение Ud принятое в преобразовательной технике.
Вид зависимости Еп (или Ud) от Uу определяется схемами силовой части и системы управления преобразователем. В случае трехфазной симметричной схемы и синусоидального опорного напряжения эта зависимость линейна. В других случаях имеется некоторая нелинейность, однако для выявления основных закономерностей в природе с замкнутой системой управления будем считать, что статическом режиме
 ,
где kп
– коэффициент передачи преобразователя.
,
где kп
– коэффициент передачи преобразователя.
Двигатель постоянного тока как элемент системы автоматического регулирования в статическом режиме характеризуется уравнением его электромеханической характеристики. В этом случае, когда ток якоря непрерывен, это уравнение при Ф=const имеет вид
 (1)
(1)
где U и I – средние значения напряжения на якоре и тока якоря за период; с – постоянная двигателя
Если двигатель питается от тиристорного преобразователя, то при малых нагрузках на валу и работе в зоне малых скоростей ток якоря имеет прерывистый характер. В этом режиме уравнение 1 непригодно, так как нужно оперировать со средними значениями напряжения и тока не за период, а за интервалы проводимости тиристоров.
Уравнение для преобразователя и двигателя принимают в виде
 где
R=Rя+Rп
– общее эквивалентное сопротивление
силовой цепи, I
– среднее значение тока якоря за период.
где
R=Rя+Rп
– общее эквивалентное сопротивление
силовой цепи, I
– среднее значение тока якоря за период.
Отсюда следует, что поддержания скорости при увеличении нагрузки необходимо автоматически увеличить напряжение преобразователя.
Характеристика усилителя считаем линейной

Напряжение тахогенератора Uтг пропорционально скорости двигателя:

Напряжение обратной связи:

Устойчивая САУ — система, в которой переходные процессы являются затухающими.
(a0pn + a1pn − 1 + ... + an)y = (b0pm + b1pm − 1 + ... + bm)g — операторная форма записи линеаризированного уравнения.
y(t) = yуст(t)+yп = yвын(t)+yсв
yуст(yвын) — частное решение линеаризированного уравнения.
yп(yсв) — общее решение линеаризированного уравнения как однородного дифференциального уравнения, то естьD(p) = (a0pn + a1pn − 1 + ... + an)y = 0
САУ
устойчива, если переходные процессы
уn(t),
вызываемые любыми возмущениями, будут
затухающими с течением времени, то
есть ![]() при
при ![]() .
.
☻ 35. Замкнутая САУ ЭП с ОС по Uя. Работа схемы. Уравнение механической характеристики.
В электроприводах со сравнительно нешироким диапазоном регулирования скорости может отказаться от использования тахогенератора, который требует особого места для установки и тщательного ухода во время эксплуатации, и применить обратную связь по напряжению на якоре двигателя
В узел сравнения вводится напряжение обратной связи Uон, получаемое при помощи датчика напряжения якоря. У-во этого датчика, обеспечивающего гальваническую развязку цепи управления и силовой цепи, рассмотренного ранее.
Напряжение обратной связи:
 ,
где kон
– коэффициент передачи узла обратной
связи.
,
где kон
– коэффициент передачи узла обратной
связи.
Уравнение электромеханической характеристики возьмем в обычной форме

Уравнения элементов системы:
Преобразователь
–

Усилитель-регулятор
–

Узел
сравнения -

Совместное решение этих уравнений без уравнения двигателя дает напряжение на якоре в замкнутой системе:
 (1)
(1)
K= - общий коэффициент усиления разомкнутой
системы.
- общий коэффициент усиления разомкнутой
системы.
Подставив формулу 1 в уравнение двигателя, получаем электромеханическую характеристику замкнутой системы
☻ 36. Передаточная функция САУ ЭП с ОС по Uя, устойчивость системы.
Применение
обратной связи по напряжению якоря,
охватывающей преобразователь, изменяет
его коэффициент усиления. Передаточная
функция такого узла с двигателем
постоянного тока, эквивалентным по
действию типовому колебательному звену
с постоянной времени двигателя и с
коэффициентом усиления равным K= ,
приводит к тому что передаточная функция
скорости двигателя будут иметь вид:
,
приводит к тому что передаточная функция
скорости двигателя будут иметь вид:
Уравнения цепи обратной связи:

Уравнение узла сравнения:

Уравнение тиристорного преобразователя:

Передаточная функция разомкнутой системы при возмущении по заданию имеет вид

☻ 37. Функциональная и структурная схемы САУ ЭП подчиненного регулирования. Вывод уравнения ЭМХ в статическом режиме.
Системы подчиненного регулирования характеризуются каскадным включением регуляторов, кол-во которых соответствует кол-ву регулируемых параметров, таких кА скорость двигателя, ток якоря, напряжение на обмотках двигателя.
Каждый
контур системы автоматического
регулирования включает в себя регулятор
с передаточной функцией
 и объект регулирования с передаточной
функцией
и объект регулирования с передаточной
функцией
 .
Выходное напряжение регулятора является
задающим сигналом для последующего
контура¸ определяющим его выходную
координату. Таким образом, каждый
последующий контур является подчиненным
по отношению к смежному с ним внешнему
контору, отсюда название – система
подчиненного регулирования.
.
Выходное напряжение регулятора является
задающим сигналом для последующего
контура¸ определяющим его выходную
координату. Таким образом, каждый
последующий контур является подчиненным
по отношению к смежному с ним внешнему
контору, отсюда название – система
подчиненного регулирования.
Оптимизация САР начинается с внутреннего контура. Задачей оптимизации является получение переходных процессов в системе,. Удовлетворяющих заданным требованиям. Эти требования в системах электроприводов сводятся к реализации быстродействующих систем с минимальными колебаниями регулируемых координат при управляющих и возмущающих воздействиях.
 -
не уверен
-
не уверен
☻ 38. Функциональная схема контура регулирования тока якоря в САУ подчиненного регулированию.
Рассмотрим схему тиристорного электропривода. Основные узлы – двигатель постоянного тока Д, тиристорный преобразователь ТП, датчик скорости - тахогенераторТГ, датчик тока якоря ДТ, регулятор скорости РС, регулятор тока РТ и блок задания скорости БЗС. На схеме имеется внутреннее сопротивление Rп тиристорного преобразователя, учитывающее влияние прерывистости тока якоря на жестокость электромеханических характеристик, для упрощения расчетов вынесено из преобразователя, и выходной величиной последнего считается среднее значение выпрямленного напряжения при токе, равном нулю. Это напряжение именутеся эдс преобразователя и обозначается Еп.
Значение Еп зависит от угла отпирания тиристоров, задаваемого системой фазового управления. В дальнейшем будем считать, что в статическом режиме эдс преобразователя линейно зависит о напряжения Uу, подаваемого на вход системы фазового управления
 .
.
☻ 39.
Структурная схема САУ ЭП подчиненного
решгулирования в статическом режиме.
Определение Кус.ст. при заданных значениях
 и
и
 .
.
уравнение для замкнутого контура регулирования тока
 ,
где
,
где
 .
.
Уравнение для замкнутого контура регулирования скорости:
 ,
,
 ,
,

Выражение
для
 можно
упростить, учитывая, что
можно
упростить, учитывая, что

При
решении уравнений относительно
 можно сделать еще одно упрощение,
учитывая, что получаемый в ходе
преобразованный член
можно сделать еще одно упрощение,
учитывая, что получаемый в ходе
преобразованный член

Тогда получим

☻40. Цифроаналоговые САУ ЭП постоянного тока. Состав и назначение схемы. Основное уравнение.
Цифроаналоговые САУ ЭП постоянного тока предназначены для регулирования и поддержания скорости на заданном уровне, при сохранении вращающего момента, как и аналоговые системы, выполняются по стуктуре с подчиненным регулированием координат. Они содержат аналоговую и цифровую части. Аналоговыми элементами таких систем являются хорошо отработанные преобразователи и двигаьели. Цифровая часть системы электропривода относится к контуру регулирования скорости и включает в себя цифровые устройства задания скорости и информационно-измерительные устройства скорости в виде датчика и регулятрора скорости.
Задание
скорости электропривода вводится в
форме числа
 c
помощью устройтсва ввода задания БЗС.
Темп нарастания задающего напряжения
и соответственно скорости обеспечивается
цифровым задатчиком интенсивности
разгона ЦЗИ. Далее цифровой сигал
задания
c
помощью устройтсва ввода задания БЗС.
Темп нарастания задающего напряжения
и соответственно скорости обеспечивается
цифровым задатчиком интенсивности
разгона ЦЗИ. Далее цифровой сигал
задания
 цифровым аналоговым преобразователем
ЦАП преобразуется в аналоговый сигнал
задания скорости
цифровым аналоговым преобразователем
ЦАП преобразуется в аналоговый сигнал
задания скорости
 и подается на аналоговый регулятор
скорости РС. Одновременно число
и подается на аналоговый регулятор
скорости РС. Одновременно число
 в управляемом делителе частоты УДЧ
определяет частоту следования импульсов
задания скорости
в управляемом делителе частоты УДЧ
определяет частоту следования импульсов
задания скорости
 ,
которыйе получаются из импульсов
эталонной частоты
,
которыйе получаются из импульсов
эталонной частоты
 ,
задаваемых высокостабильным кварцевым
генератором КГ.
,
задаваемых высокостабильным кварцевым
генератором КГ.
Импульсы
задания с частотой поступают в цифровой интегратор ЦИ,
который явялется интегрирующей частью
регулятора скорости и на который также
подаются импульсы обратной связи по
скорости, следующие с импульсного
датчика скрости ИДС с частотой
поступают в цифровой интегратор ЦИ,
который явялется интегрирующей частью
регулятора скорости и на который также
подаются импульсы обратной связи по
скорости, следующие с импульсного
датчика скрости ИДС с частотой
 пропорциональной текущей скорости
двигателя.
пропорциональной текущей скорости
двигателя.
Основное уравнение

☼ 41. Полная и упрощенная структурная схема цифроаналоговой системы стабилизации скорости.
☻ 42. Цифровая САУ ЭП постоянного тока. Состав и назначение элементов схемы.
Более точная
система регулирования скорости получается
при налчиии цифр.контура скорости. В
такой сист.эл-привода задание скорости
может осуществ.скачком или в виде
времен.ф-ии с использов.цифрового
задатчика интенсивности, обеспеч.требуемый
темп нарастания сигнала задания скорости
ЦЗС и соотв., скорости двигателя. Сигнал
обрат.связи по скорости обеспеч. ИДС.
Импульсы датчика скорости подсчитываеются
счетчиком РС за фиксирован.дискретный
интервал времени Т0, определяемый
частотой дискретизации f0
цифровой системы
 .
Частота дискретизации задается от
высокостабильного кварцевого генератора
эталонной частоты КГ через делитель
частоты ДЧ
.
Частота дискретизации задается от
высокостабильного кварцевого генератора
эталонной частоты КГ через делитель
частоты ДЧ
 .
Текущая скорость в момент времени t
пропорциональна числу подсчитанных
импульсов
.
Текущая скорость в момент времени t
пропорциональна числу подсчитанных
импульсов
 .
.
На выходе счетчика
РС по истечении интервала времени
получается число
 как цифровой сигнал обратной связи по
скорости. Это число запоминается в
регистре P1
до начала следующего периода и затем
сравнивается в сумматоре СУ1 с чсилом
задания скорости Nзс.
На выходе СУ1 получается разница в виде
числового сигнала управления:
как цифровой сигнал обратной связи по
скорости. Это число запоминается в
регистре P1
до начала следующего периода и затем
сравнивается в сумматоре СУ1 с чсилом
задания скорости Nзс.
На выходе СУ1 получается разница в виде
числового сигнала управления:
 ,
которое запоминается в регистре P2
и далее подаетс\ в ЦАП, если в системе
используется пропорции он.регулятор
скорости, работающий по алгоритму
,
которое запоминается в регистре P2
и далее подаетс\ в ЦАП, если в системе
используется пропорции он.регулятор
скорости, работающий по алгоритму
 ,
где k
–масшатбный коэф.
,
где k
–масшатбный коэф.
Если в системе используется ПИ-регулятор скорости, работающ. По алгоритму
 ,
то в цифровой части применяются
дополнительныо сумматор СУ2 и регистр
Р3. Интеграл.составляющая получается
посредством последов.алгебраич.суммирования
текущих значений отклонения скорости
,
то в цифровой части применяются
дополнительныо сумматор СУ2 и регистр
Р3. Интеграл.составляющая получается
посредством последов.алгебраич.суммирования
текущих значений отклонения скорости
 в накапливающем сумматоре СУ2 и
последующ.запоминания рез-та в регистре
Р3.
в накапливающем сумматоре СУ2 и
последующ.запоминания рез-та в регистре
Р3.
Цифровой регулятор скорости и др.цифровые устр-ва реализуются на базе стандарт.блоков, выпускаемых промышленностью.Реализация этих устр-в упрощается, если управление эл-приводом производится от ЭВМ, в которую заложена соответст.программа.
☻ 43. Замкнутая САУ ЭП переменного тока частотно-токового управления. Состав. Состав и назначение элементов функциональной системы.
В данной схеме АД
питается от ПЧ с АИТ. В этом случае
управляемый выпрямитель (УВ) совместно
с контуром регулирования тока выпрямителя
образует источник тока. Управление
двигателем производится путем задания
тока статора и частоты АИТ. Обе величины
зависят от общ.сигнала задания
 ,
определяющего скорость двигателя. Ток
статора зависит и от нагрузки двигателя.
,
определяющего скорость двигателя. Ток
статора зависит и от нагрузки двигателя.
Заданием на ток
статора является выход.напряжение ФП,
в котором релизуется хар-тика
 .
Входным сигналом ФП Uвх
служит разность напряжений задатчика
интенсивности (ЗИ) разгона двигателя и
напряжения обрат.связи по скорости Uос,
снимаемого с ТГ BG.
.
Входным сигналом ФП Uвх
служит разность напряжений задатчика
интенсивности (ЗИ) разгона двигателя и
напряжения обрат.связи по скорости Uос,
снимаемого с ТГ BG.
Контур регулирования тока статора включ. в себя регулятор тока РТ, управляем.выпрямитель УВ, Rш и датчик тока ДТ и обеспечивает постоянство потока двигателя. Контур регулирования скорости включает в себя функциональный преобразователь ФП, РТ, УВ, Автономный Инвертор Тока, движок М и тахогенератор BG. Напряжение входа ФП (Uвх) пропорционально частоте вращения ротора и напрячжению задания скорости и обеспечивает поддержание заданной скорости.
☻ 44. Замкнутая САУ ЭП переменного тока с системой векторного управления. Состав и назначение элементов функциональной схемы.
Раздельное управление скоростью и потокосцеплением АД с короткозамкнутым ротором можно эффективно производить, используя принцип веткорного управления. Координаты эл-привода, измеренные в неподвижной системе координат, могкт быть преобрпзованы к вращающ.системе координат, и из них могут быть выделены постоянные значения, пропорциональные составляющим векторов во вращающ.системе координат. По координатам и производ.управление.
Исходная информация для построения-информация о мгновенных значениях и пространственном положении вектора потокосцепления в воздушном зазоре, мгновен.значениях токов или напряжений статора и скорости ротора движка. Вращающ.система координат принимается определен.образом ориентрированной относительно вектора потокосцепления движка. Удобные алгоритмы управления имеют место при ориентации координатной системы относительно вектора потокосцепления ротора.
Система имеет 2 канала управления: модулем вектора потокосцепления и угловой скоростью ротора. 2-хканальная система управления деат возможность осуществить независимое регулирование модуля вектора потокосцеления ротора и скорости ротора при сохранении пропорциональности между моментом, развиваемым двигателем и составляющей намагничивающей силы статора., находящейся в квадратуре с волной потокосцепления ротора. Текущие значения переменных измеряются в неподвижной системе координат с помощью датчика потока (ДП) и датчика тока статора(ДТ).
Для пересчета переменных из неподвижной системы координат в систему координат, связанную с потокосцеплением ротора, используется вектор-фильтр ВФ и координатный преобразователь КП2.
☼ 45. Многодвигательный ЭП постоянного тока. Состав и назначение элементов функциональной схемы.
☺ 46. Цифроаналоговая САУ многодвигательного ЭП пост.тока. Состав и назначение элементов функцион.схемы.
Цифроаналоговые и цифровые системы управления скоростью и соотношением скоростей многодвигательных электроприводов выполняются с использованием локальных цифроаналоговых и цифровых систем управления, взаимосвязанных по цепи управления цифровыми устройствами задания скорости и соотношения скоростей.
На
рис. Представлена
функциональная схема цифроаналоговой
системы управления тремя эл-приводами.
Каждая из локальных систем выполняется
по схеме системы с цифровым интегратором.
Управление соотнощением скоростей
производится в цифровой форме по схеме
последовательного управления.. На
частотные входы ПКЧ каждой из систем
управления ведомыми эл-приводами
поступает частота задания из предыдущей
системы. На частотный вход ПКЧ системы
ведущего эл-привода 1 поступает частота
f0
с генератора эталонной частоты.Соотношение
скоростей регулируется изменением
чисел
 и
и
 с помощью устройств задания соотношения
скоростей. Эти числа пропорциональны
соответств.коэффициентам соотношения
скоростей:
с помощью устройств задания соотношения
скоростей. Эти числа пропорциональны
соответств.коэффициентам соотношения
скоростей:
 -электроприводов
2 и1,
-электроприводов
2 и1,
 -электроприводов
3 и 2.Одновременное регулирование скорости
всех эл-приводов производится путем
изменения числа
-электроприводов
3 и 2.Одновременное регулирование скорости
всех эл-приводов производится путем
изменения числа
 .
Частота задания
.
Частота задания
 системы управления элприводом 1 явл.
Ведущей. Частоты задания систем управ.
Эл-приводами 2 и 3 опред.через коэф-ты
соотношения скоростей
системы управления элприводом 1 явл.
Ведущей. Частоты задания систем управ.
Эл-приводами 2 и 3 опред.через коэф-ты
соотношения скоростей
 и
и

Достоинством
последоват.управления соотношением
скоростей многодвиг.эл-приводов в
цифровой форме является отсутствие
нестабильности коэф-тов
 .
При последов.управлении большим числом
эл-приводов в аналоговых системах
накопленная погрешность формирования
.
При последов.управлении большим числом
эл-приводов в аналоговых системах
накопленная погрешность формирования
 вследствие дрейфа напряжений масштабных
усилителей может оказаться слишком
большой и применение аналог.системы-недопустимым.
вследствие дрейфа напряжений масштабных
усилителей может оказаться слишком
большой и применение аналог.системы-недопустимым.
УЗСС-устройство задания соотношений скоростей.
ЦЗС-цифровой задатчик интенсивности разгона.
ЦИ- цифровой интегратор
☺ 47. Главный ЭП ЛРПМ. Состав и назначение элементов функцион.схемы. Работа РКСУ ЭП.
По функцион.схеме привода:
Основные узлы привода;-силовая часть, узел регулятора скорости, узел обратной связи по напряжению на якоре, узел задания скорости и плавного разгона привода,узел ограничения тока якоря и вращ.момента двигателя, релейно-контакторная схема управления приводом, вспомог.блок питания.
В СЧ имеются главный движок постоянного тока М, тиристорный преобразователь ТП с системой фазового управления СФУ, вводной автоматический выключатель Sf1, силовые контакты контакторов КМ1 и КМ», необходимые для реверсирования движка и трансформатор тока ТТ датчика тока.
Напряжение на входе СФУ называется напряжением управления.Изменение этого напряжения от 0 до 10 в. Приводит к изменению напряжения на выходе тиристорного преобразователя в режиме холостого хода.
Напряжение управления поступает на вход СФУ от регулятора, построенного на базе усилителя А1. Обычно это линейная интегральная микросхема с коэффициентом усиления напряжения.
Выходное напряжение усилителя А1-15 В, выходной ток-до 5 мА, что достаточно для управления тиристорным преобразователем. Усилитель А1 иметт два входа, прямой и инверсный.
Потенциометр R1 служит для выбора рабочей скорости машины и находится на посту управления. Потенциометр R2 предназначен для выбора заправочной и толчковой скорости и расположен в шкафу с аппаратурой.
Релейно-контакторная схема управления приводом (РКСУ) обеспечивает выполнение всех необходимых команд. Она питается напряжением 220 В постоянного тока от отдельного выпрямителя. Этот выпрямитель включается автоматом SF1/ Кроме катушек реле, контакторов и кнопок управления в схеме имеется обмотка возбуждения двигателя LM, а также катушка магнита YB, растормаживающего машину.
В цепь обмотки возбуждения двигателя включена катушка токового реле КА1, предназначенная для отключения двигателя в случае обрыва цепи. В двигателе, потерявшем возбуждение, исчезает противоэдс якоря и ток в обмотке якоря становится равным току КЗ, т.е. увеличивается примерно в 10 раз.
Кроме катушки КА1 последовательно с обмоткой возбуждения включен резистор R14, который может закорачиваться контактом КМ3.