

13
2.СВЯЗИ И РЕАКЦИИ СВЯЗЕЙ
2.1. Свободное и несвободное тело. Активные и реактивные силы
Тело называется свободным, если под действием приложенных к нему сил может перемещаться в любом направлении (рис. 2.1, а).
Тело, свобода перемещения которого ограничена другими телами, называется несвободным (рис. 2.1, б).
Тела, ограничивающие свободу перемещения данного тела, называются его связями.
При действии данного тела на связь с ее стороны возникает противодействие. Сила, с которой связь действует на данное тело, называется реакцией связи (R).
Таким образом, все силы, действующие на данное тело, можно подразделить на активные и реактивные силы.
Активными называются известные по модулю и направлению силы, с которыми на данное тело действуют другие тела, не являющиеся его связями.
Реактивные силы – это реакции связей данного тела. Реакции связей возникают только в том случае, когда тело под действием активных сил давит на связи. При этом направление реакции связи противоположно направлению, по которому связь препятствует перемещению данного тела, и зависит от типа связи.
При решении задач статики часто используется принцип освобождаемости тел от связей. Согласно этому принципу несвободное тело (рис. 2.1, б) можно рассматривать как свободное, если связи заменить их реакциями (рис. 2.1, в).
2.2. Основные типы связей
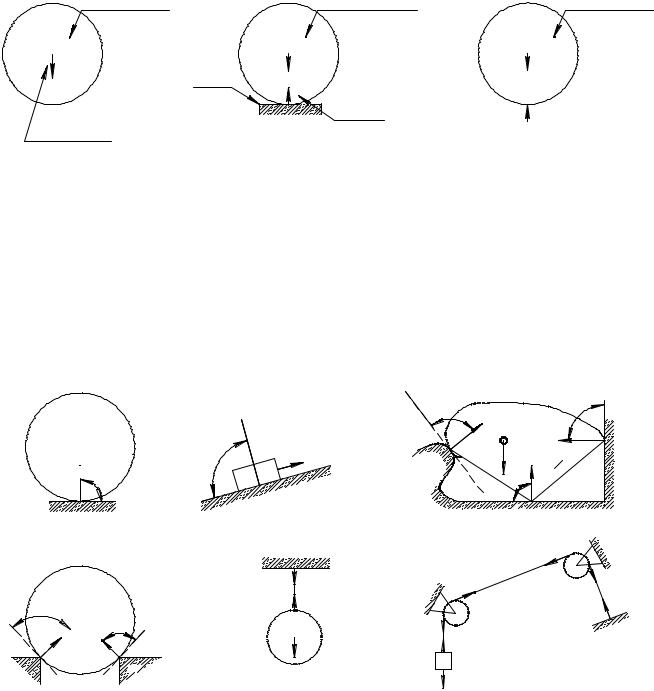
1.Абсолютно гладкая плоскость (или поверхность), где силы трения пренебрежимо малы. Реакция R гладкой плоскости (или поверхности) направлена по нормали к поверхности (рис. 2.2, а – 2.2, в).
2.Ребро. Реакция ребра R направлена по нормали к поверхности тела, опирающегося на это ребро (рис. 2.2, г).
3.Гибкая связь (трос, канат, нить). Реакция нити Т на данное тело направлена вдоль нити (рис. 2.2, д). Гибкая связь может испытывать только растяжение. При этом растягивающее усилие (натяжение) нити неизменно на всех ее участках и равно реакциям нити на соединяемые ей тела. При растяжении реакции направлены от тел, соединяемых нитью (рис. 2.2, е). Если пренебречь силами трения, то натяжение нити на всех ее участках равно величине подвешенного к ней груза (Т = Р).
4.Тонкий невесомый (незагруженный) стержень с шарнирами по концам.
Шарнир – это устройство, допускающее поворот одного тела относительно другого. Реакция тонкого стержня N на данное тело направлена по прямой, соединяющей шарнирные концы стержня (рис. 2.3, а). В зависимости от направления сил, действующих со стороны шарниров, прямой невесомый
14
стержень АВ может испытывать растяжение или сжатие (рис. 2.3, б). Усилие стержня изображается его реакциями на шарниры: при растяжении – стрелками от шарниров, а при сжатии – стрелками к шарнирам.
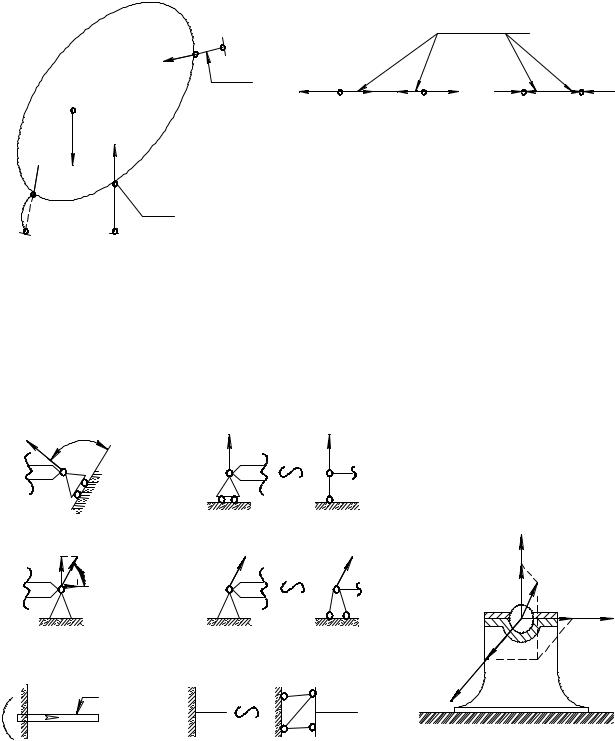
5. Шарнирно-подвижная опора (рис. 2.4, а). Эта связь допускает поворот данного тела вокруг оси опорного шарнира и поступательное (линейное) перемещение тела параллельно опорной плоскости. Реакция связи R проходит через центр шарнира перпендикулярно опорной плоскости. Конструкция шарнира представляет собой подшипник (цилиндрический шарнир), наружная обойма которого крепится к опоре, а внутренний валик – к данному телу. Шарнирно-подвижная опора эквивалентна одной связи 4-го типа (рис. 2.4, б).
6. Шарнирно-неподвижная опора (рис. 2.4, в). Эта связь допускает только поворот данного тела вокруг оси опорного шарнира, препятствуя любому поступательному движению тела. Реакция связи R проходит через центр шарнира, но линия действия реакции может быть какой угодно в зависимости от сил, действующих на данное тело. Таким образом, определению подлежат как модуль R, так и угол α, определяющий направление реакции. Очень часто вместо R и α определяют составляющие Х и У реакции по взаимно перпендикулярным осям х и у, после чего, используя в условиях плоской задачи зависимости (1.1) и (1.2), определяют модуль и направление реакции
R = X + У = Хi + Уj
где Х, У – проекция R на оси х, у.
R = \/ Х2 + У2 , tg α = У / Х → α
Шарнирно-неподвижная опора эквивалентна двум связям 4-го типа (рис. 2.4, г).
7.Жестко защемляющая опора (заделка). Эта связь (рис. 2.4, д)
препятствует любому поступательному и вращательному движению данного
тела. Составляющими реакции заделки А являются горизонтальная Ха, вертикальная Уа составляющие и опорный момент Ма. Заделка эквивалентна трем связям 4-го типа, оси которых не должны пересекаться в данной точке
(рис. 2.4, е).
8.Шаровой шарнир (рис. 2.4, ж). Эта связь представляет собой шар, который может вращаться внутри сферической полости. Линия действия реакции R проходит как угодно в пространстве через центр шара. Модуль и направление реакции R можно определить через ее составляющие Х, У и Z по зависимостям (1.2) и (1.3).
|
|
15 |
|
а. |
б. |
|
б. |
|
Свободное тело |
Несвободное тело |
Свободное тело |
Р |
Р |
|
Связь |
R |
Активная сила (сила тяжести)
|
Р |
|
Реакция |
R |
|
связи |
||
|
Рис. 2.1
а.
R 
г.
90Е
RA 
б.
9 0 Е
. 0Ес
9 ка
RB
A B
9 |
0 |
|
Е
 R
R
д.
в. |
90 |
|
|
|
|
|
|
Е |
к |
|
|
|
|
|
|
||
а |
|
|
|
|
|
|
|
|
с |
|
Е |
|
|
|
|
|
|
. |
|
|
|
|
|
0 |
||
|
RA |
|
|
|
|
9 |
|
|
|
|
|
|
|
RC |
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
C |
|
|
|
P |
|
|
|
|
||
A |
|
|
|
B |
|
|
||
|
|
|
Е |
R |
|
|
||
|
|
|
|
|
|
|
||
|
|
0 |
|
|
|
|
|
|
|
|
9 |
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
е. |
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
Т |
|
Т |
|
|
|
|
|
Т |
Т |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Т |
|
Т 
Р Т
Т
Р
 Т
Т
Рис. 2.2
16
. б.
RC С |
Реакции стержня |
наузлыА иВ |
Стержень |
А |
В |
А |
В |
|
|
|
|
|
|
|
Растяжение |
|
Сжатие |
RA P RB
 А В
А В
Шарнир
а.
|
Е |
RA |
90 |
|
А
в.
УA RA
a
А ХA
д.
 УA Р
УA Р
МA 
 А ХA
А ХA
Рис. 2.3
б.
RA |
RA |
АА
г. |
|
ж. |
z |
|
|
|
|
|
|
||
RA |
|
RA |
Z |
|
|
|
А |
|
R |
|
|
|
|
|
|
|
|
А |
|
|
|
Y |
y |
е. |
|
|
X |
|
|
|
|
|
|
|
|
А |
А |
|
x |
|
|
|
|
|
|
Рис. 2.4