

53
6. 8. Примеры решения задач на равновесие плоской произвольно расположенной системы сил
При решении рассматриваемой задачи рекомендуется придерживаться следующей последовательности:
1)выбрать тело, равновесие которого будет рассматриваться;
2)приложить к нему все активные силы, заменив распределенную нагрузку равнодействующей сосредоточенной силой;
3)выбрать систему координат и заменить отброшенные связи их реакциями;
4)составить уравнения равновесия и определить из них неизвестные опорные реакции;
5)проверить правильность решения задачи.
Пример 6. 1
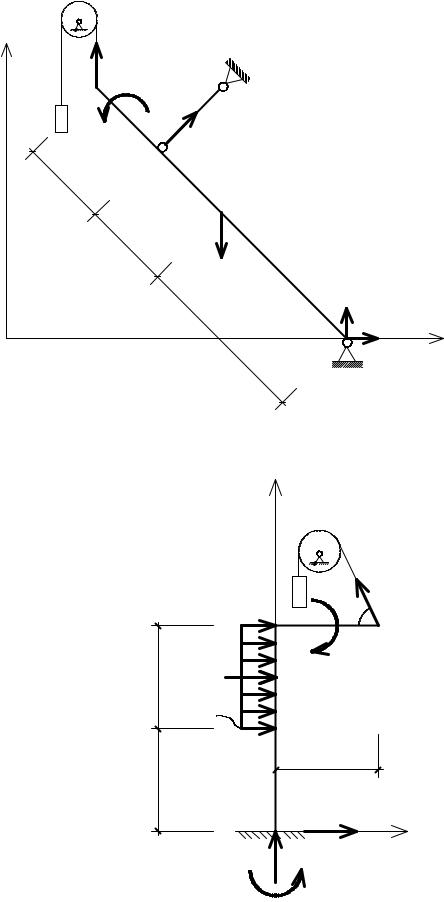
Определить опорные реакции балки от заданной нагрузки при следующих данных: α = 45°; l = 2,0 м; Р = 10 кН; Q = 6 кН; М = 8 кНм. Схема балки показана на рис. 6. 6.
Решение:
На балку действует пара с моментом М, силы Р и Q. Действие груза на балку – силу Т покажем приложенной в точке В и направленной вдоль троса. Так как идеальный блок изменяет лишь направление действия силы, сохраняя неизменным ее модуль, то сила Т = Q. Применяя принцип освобождаемости от связей, заменим действие связей на балку их реакциями. Реакцию А направим вдоль стержня СД. На балку действует система произвольно расположенных сил, поэтому направление реакции связи А заранее неизвестно, ее представим в виде двух составляющих ХА и УА, направленных вдоль осей координат х и у.
Составим уравнения равновесия для плоской системы сил:
∑Хi = 0 ; ХА + S Cos (90° - α) = 0 ;
∑Уi = 0 ; УА + Q – P + S Sin α = 0;
Р. АВ
∑МА (Рi) = 0 ; ---------- Cosα - S . АС – Т . АВ . Соsα + М = 0.
2
Из решения системы трех алгебраических уравнений определим неизвестные:
ХА = - 1,22 кН ; УА = 2,78 кН ; S = 1,72 кН
Знак минус у реакции ХА указывает, что ее направление необходимо сменить на противоположное принятому.
Для проверки правильности решения задачи выбираем произвольную точку В и составляем уравнение равновесия статики в виде ∑ МВ (Рi) = 0.
∑ МВ (Рi) = 0 ; М + S . 1 – Р . 2 Соs 45° + УА . 4 Соs 45° + ХА . 4 Sin 45° = 0

54
√2 √2 √2 8 + 1,721 – 10 . ----- + 2,78 . 4 ----- - 1,22 . 4 ----- = 0
2 2 2
17,58 – 17,58 = 0
Пример 6. 2
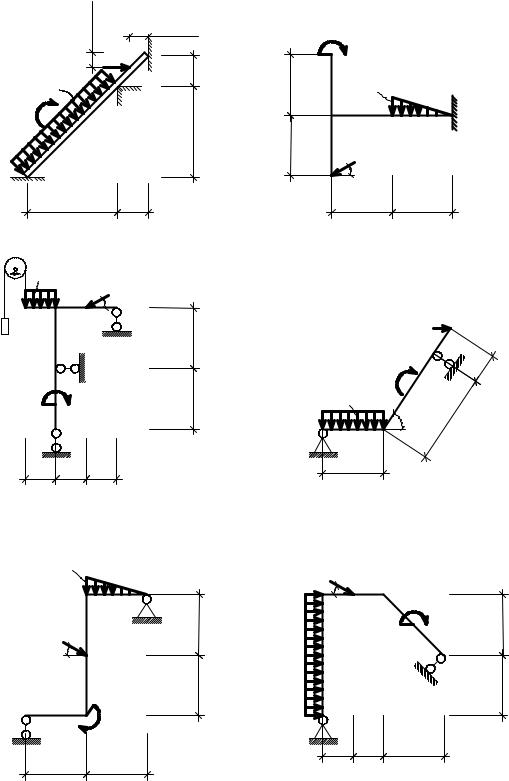
Определить опорные реакции в раме от заданной нагрузки при следующих данных: α = 60°; l = 2,0 м; Q = 5 кН; М = 2 кНм; q = 2 кН/м. Схема балки показана на рис. 6. 7.
Решение:
Равномерно распределенную нагрузку заменим равнодействующей
R = q . ВД = 2 . 2 = 4 кН
Действие груза на раму – силу Т покажем приложенной в точке С и направленной вдоль троса, по модулю равной весу груза Q. Так как связь осуществляется с помощью жесткой заделки, то реакция заделки в точке А приводится в силе RА = ХА + УА и к реактивной паре с моментом МА.
Освобождаемся от связей, и заменяя их действие на раму реакциями связей, будем иметь неизвестные реакции связи ХА , УА, и МА.
Составляем уравнения равновесия для плоской системы сил произвольно расположенных сил.
∑Хi = 0 ; ХА + R - Р Cos α = 0 ;
∑Уi = 0 ; УА + Т Sin α = 0 ;
∑МА (Рi) = 0 ; МА – R . 3 – М + Т Cosα . 4 + Т . Sinα . 2 = 0
Из решения системы уравнений равновесия определяем составляющие реакции RА и реактивный момент МА.
ХА = - 1,5 кН ; УА = - 4,33 кН ; МА = - 4,66 кНм Знак минус у составляющих ХА , УА, и МА указывает на то, что истинное
направление их противоположно принятому в решении. Для проверки правильности решения задачи составим уравнение равновесия в виде ∑ МС (Рi)
=0, где точка С произвольно выбранная точка.
∑МС (Рi) = 0 ; - УА . 2 + ХА . 4 + МА + R . 1 - М = 0 ; 4,33 . 2 - 1,5 . 4 – 4,66 + 4 – 2 = 0 ;
12,66 – 12,66 = 0.
Пример 6. 3
Определить опорные реакции в рамах, показанных на рис. 6. 8 – 6. 11 от заданной нагрузки при следующих данных: α = 60°; l = 4,0 м; Р = 10 кН; М = 2 кНм; q = 4 кН/м самостоятельно.
55
|
|
_ |
|
y |
|
T |
|
_ |
B |
M |
D |
|
|
||
Q |
|
|
_ |
|
|
|
|
|
|
C |
N |
|
l |
|
|
|
|
|
|
|
/ |
|
|
|
2 |
|
|
|
|
l |
|
|
|
/ |
|
|
|
2 |
_ |
|
|
|
|
|
|
|
P |
|
|
|
l |
_
yA |
_ |
x |
A |
A |
|
x |
|
Рис. 6.6. y
l
l
|
_ |
|
_ |
|
Q |
|
|
|
|
aT |
|
|
|
|
|
_ |
B |
|
C |
|
M |
|
|
R |
|
|
|
q |
|
|
|
|
D |
|
|
|
|
l |
|
|
|
_ |
|
|
A |
xA |
x |
_
yA MA
Рис. 6.7

56
1. |
l/ 2 |
y |
2. |
|
|
|
|
_ |
|
q |
q |
P |
|
|
|
A a |
|
|
|
|
|
M |
|
l2 |
|
|
2l |
|
|
|
l |
|
|
B |
x |
A
y
M
B
_
P a
q
x
l |
l |
|
l |
l |
Ответ: RA=-14,17 кН; хВ=-5 кН; уВ=38,3 кН |
B |
A |
A |
|
|
|
Ответ: R |
=21,80 кН; х =-5 кН; у =62,46 кН |
|
q |
_ |
4. |
|
|
3. |
P |
|
|
|
|
a B |
|
A |
|
|
|
|
|
_ |
|
M |
|
|
P |
l2 |
l2 |
|
a |
|
|
|
|
||
l2
A
l l
5.l
q M
a |
a |
|
|
A |
|
q
l
B
M
l l
|
6. |
l |
|
|
_ |
|
l |
|
|
P |
l |
q |
M |
|
a |
||||
|
||||
l75, 0 |
l5,1 |
|
|
|
|
a |
B |
||
|
|
|
||
|
|
_ |
|
|
B |
A |
a P |
|
|
|
|
|
Рис. 6.8
57
|
l |
|
|
7. |
0,25 |
|
0,25 l |
|
|
||
_ |
|
|
|
|
P |
C |
l |
|
q |
0,5 |
|
|
|
||
|
|
|
|
M |
B |
|
|
1,5 l
A
1,5 l |
0,5 l |
9. q |
_ |
|
P a |
_ |
C |
2P |
|
l
 B
B
M
l
A
l/ 2 l/ 2 l/ 2
11. |
q |
B |
|
|
|
|
_ |
l |
|
P |
|
|
a |
|
|
|
l |
|
A |
M |
|
|
|
|
l |
l |
8. |
M |
|
l |
q |
|
|
_ |
A |
l |
|
|
|
P |
|
|
a |
|
|
l |
l |
10.
|
|
_ |
|
|
|
|
|
|
|
|
P |
|
|
|
|
||
|
M |
B |
|
|
0 |
, |
5 |
l |
|
|
|
|
|||||
|
|
|
|
|
||||
|
q |
|
|
5 |
l |
|
|
|
|
a |
1 |
, |
|
|
|
||
A |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
l
12. _P
a
M
l
B
l
A
l/ 2 l/ 2 |
l |
Рис. 6.9

58
13. |
_ |
|
Pa |
|
A |
|
M |
2l |
|
q
l |
l/ 2 l/ 2 |
15.
q A
l1,5 2q
M
1,5 l |
0,5 l |
17.
q
|
_ |
|
|
|
P |
|
|
|
|
|
l |
|
M |
|
l |
A |
|
B |
0,5 |
a |
|
||
|
|
|
l l
14. 0,5 l |
1,5 l |
|
q |
A_  a P
a P
|
|
_ |
|
|
|
2P |
|
|
|
B |
M |
|
a |
|
|
|
|
l |
|
|
|
|
|
16. |
|
_ |
q |
|
P |
||
|
|
||
|
|
a |
|
C
B
M
A
l/ 2 l/ 2 l/ 2 l/ 2
_
18. aP
|
M |
|
|
q |
|
A |
B |
|
a |
||
|
||
|
l l |
1,5 l 0,5 l
l
l
2 l
Рис. 6.10

59
l
A 19.
q
M
_
P B
0,5 l 0,5 l
l
20.
_ a A |
|
|
P |
|
l |
M _ |
q |
l |
2P |
|
|
|
|
B |
|
l |
l |
l |
l |
|
q |
|
|
|
|
|
_ |
|
|
|
|
|
2P |
A |
22. |
P |
q |
|
|
|
|
_ |
|
|
21. |
_ |
|
a |
M |
|
M |
A |
||||
|
P |
|
|||
|
|
aB |
l |
l |
|
|
|
|
|
||
0,5 l |
0,5 l |
l |
|
|
|
B |
|
|
24. |
q |
|
|
|
23. |
q |
|
_ |
A |
_ |
|
|
|
|
|
a |
|
|
P |
M |
|
|
|
|
С |
P |
|
|
B |
||
|
a M |
|
|
|
|
a |
||
|
|
|
|
|
|
|||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,5 l |
0,5 l |
|
l |
0,5 l |
1,5 l |
|
|
Рис. 6.11