

96
9.4. Трение качения
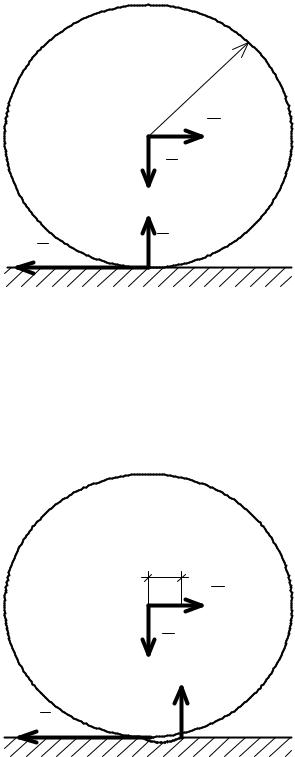
Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого. Рассмотрим круглый цилиндрический каток радиуса R и веса Р, лежащий на шероховатой поверхности (рис. 9. 15).
Приложим к оси катка О силу Q. В точке А возникает сила трения F, численно равная Q, которая препятствует скольжению катка по плоскости. Силы Q и F образуют пару качения, а N = - Р. Казалось бы, что качение катка должно начинаться при приложении к оси катка любой силы, но этого не происходит, так как вследствие деформации касание тел происходит не в точке А, а по некоторой площадке АВ. То есть нормальная реакция оказывается смещенной от линии действия силы Р на расстояние δ. В предельном положении на каток действуют две пары сил: пара (Q, F) с моментом М = Q R –
пара качения и пара (Р, N) с моментом М = N δ - пара сопротивления качения. Q R = N δ или Q =(δ : R) . N
Пока Q < Q предельного – каток находится в покое, при Q > Q предельного начинается качение катка. Величина δ называется коэффициентом трения качения и представляет собой плечо пары сопротивления. Этот коэффициент имеет линейную размерность, зависит от материала и определяется опытным путем. Отношение δ/R для большинства материалов значительно меньше статического коэффициента трения скольжения f. Поэтому в технике стремятся заменить скольжение качением (подшипники, катки, колеса и т.д.).
Так, например, замена скользящих тел подшипниками уменьшает силу трения в 40 раз.
10. ПРОСТРАНСТВЕННАЯ СИСТЕМА ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ
10.1. Момент силы и главный момент системы сил относительно оси
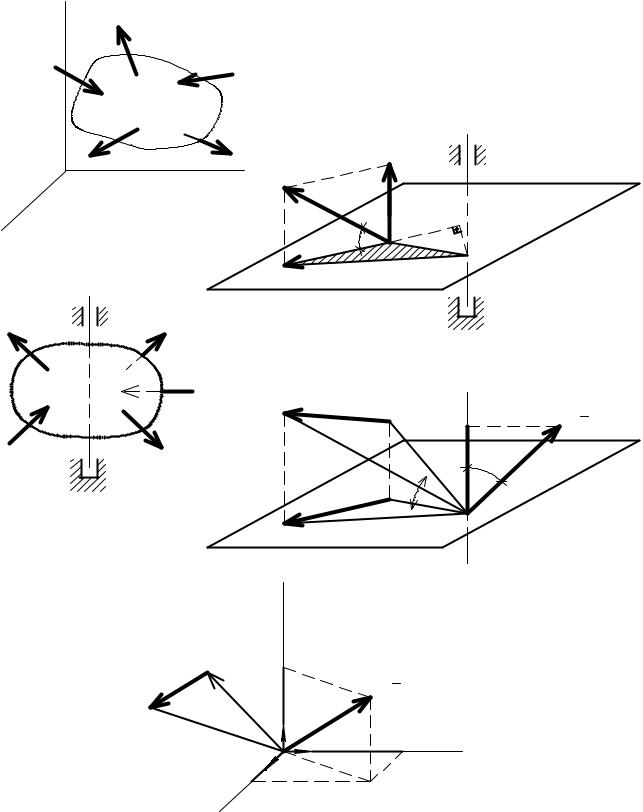
Силы, действующие на твердое тело как угодно в пространстве, в общем случае образуют произвольную пространственную систему сил (рис. 10. 1, а).
Если твердое тело имеет неподвижную ось вращения, то силы, действующие на тело, могут вызвать его вращение относительно этой оси. Мерой вращательного действия силы является ее момент относительно оси вращения.
Пусть на тело, имеющее ось вращения z, действует произвольно расположенная в пространстве сила Р (рис. 10. 1, б). Проведем через начало силы (т. А) плоскость, перпендикулярную оси z, и разложим силу на две составляющие Р′ и Р′′:
97
R
O Q
P
F N
A
d
O Q
P
F A
B
Рис.9.15
98
а. z
O |
y |
|
x
в. |
B |
|
z |
||
|
||
P1 |
P2 |
B
Pn Pi
b
б.
P
P' |
a |
|
г.
P
P'
|
z |
P'' |
|
A |
d |
|
|
|
o |
|
A |
|
z |
|
Moz |
MO(P) |
|
|
|
||
|
|
|
|
|
|
|
a |
a |
|
a |
|
|
|
|
o |
z
д.
P |
A(x, y, z) |
|
|
|
Moz |
|
MO(P) |
B |
r |
|
|
|
|
||
|
k |
|
|
|
o |
j |
oy |
|
ox i |
|
M |
|
|
y |
|
|
M |
|
|
|
x |
|
|
Рис. 10.1
99
Р = Р′ + Р′′ , где Р′ является проекцией силы Р на проведенную плоскость. А сила Р′′
параллельна оси z.
Сила Р′′ не может вращать тело относительно оси z, так как параллельна ей и стремится вызвать только поступательное движение тела вдоль оси. Вращение тела создается силой Р′. Ее момент относительно оси равен произведению модуля силы на кратчайшее расстояние от оси до линии действия силы. Этим расстоянием является плечо d силы Р′ в плоскости, перпендикулярной оси, относительно точки их пересечения (т. О, рис. 10. 1, б).
Таким образом, моментом силы относительно оси называется скалярная величина, взятая со знаком «плюс» или «минус», равная моменту проекции силы на плоскость, перпендикулярную оси, относительно точки пересечения оси с этой плоскостью:
|
|
|
|
|
|
Мz (Р) = Мо (Р′ |
) = ± Р′ d |
(10. 1) |
|||
Момент силы относительно оси считается |
положительным, если при |
||||
взгляде с положительного направление оси вращения тела под действием силы
противоположно движению часовой стрелки. |
|
|||||
В соответствии с выражением (4. |
2) получаем: |
|
||||
|
|
|
|
|
2 А ОАВ |
(10. 2) |
Мz (Р |
) = Мо (Р′) = |
|||||
Если учесть, что Р′ = Р Соs α, то выражение (10.1) примет вид: |
||||||
|
|
|
|
(10. 3) |
||
Мz (Р |
) =Р d Соs α |
|
||||
Момент силы относительно оси равен нулю, если сила и ось расположены
водной плоскости, что возможно в двух случаях:
1)сила параллельна оси;
2)линия действия силы пересекает ось.
Действительно, если Р ≠ 0, то согласно выражению (10. 3)
Мz (Р) =Р d Соs α = 0,
когда:
1)Соs α = 0, т.е. α = 90° и, следовательно, Р z;
2)d = 0, т.е. линия действия силы Р пересекает ось z.
При действии на тело с неподвижной осью вращения нескольких сил (рис. 10. 1, в) мерой их вращательного действия является суммарный момент сил относительно оси.
Алгебраическая сумма моментов всех сил, приложенных к телу, относительно какой-либо оси называется главным моментом системы сил относительно этой оси:
n |
|
|
|
Мz = ∑ Мz (Рi ) |
(10. 4) |
||
i=1 |
|
||