

Можно запомнить, что ось симметрии совпадает с переменной входящей в уравнение в первой степени.
Рис. 17
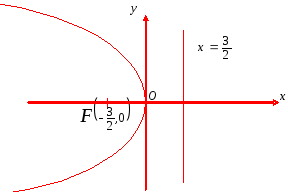
Рис. 18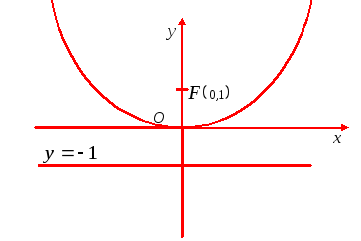
§ 3. Параллельный перенос
Если перенести начало координат в точку
![]() и
не менять направление осей, то связь
между старыми координатами
и
не менять направление осей, то связь
между старыми координатами
![]()
![]() ,
,
![]() и новыми
и новыми
![]() ,
,
![]() одной
и той же точки выражается формулами:
одной
и той же точки выражается формулами:
 или
или
Пример
Установить, что данное уравнение определяет эллипс. Найти координаты его центра, полуоси, эксцентриситет.
![]()
Решение:
Перегруппируем слагаемые
![]() .
Вынесем коэффициент при старших степенях
за скобку
.
Вынесем коэффициент при старших степенях
за скобку
![]() .
.
В каждой из полученных скобок добавим
слагаемые, так чтобы получился полный
квадрат, воспользовавшись формулами
сокращенного умножения
![]() и
и
![]() .
.
В нашем случае
![]() .
.
Вынесем за скобки слагаемые, не входящие в полный квадрат
![]() .
.
Применим формулы сокращенного умножения
![]() .
Перенесем свободный член в правую часть.
.
Перенесем свободный член в правую часть.
![]() .
Разделим обе части уравнения на 48.
.
Разделим обе части уравнения на 48.
![]() .
Произведя сокращение в дробях, получим
.
Произведя сокращение в дробях, получим
![]() .
.
Введем новые обозначения

Получим
![]() .
Это каноническое уравнение эллипса в
новой системе координат, полученной
параллельным переносом старой системы
координат, а именно оси
.
Это каноническое уравнение эллипса в
новой системе координат, полученной
параллельным переносом старой системы
координат, а именно оси
![]() на одну единицу вправо, оси
на одну единицу вправо, оси
![]() на
две единицы вниз. Новый центр находится
в точке
на
две единицы вниз. Новый центр находится
в точке
![]() .
.
П олуоси
эллипса равны соответственно
олуоси
эллипса равны соответственно
![]() и
и
![]() ,
то есть
,
то есть
![]() ,
значит, фокусы располагаются на оси
ординат. Расстояние между фокусами
,
значит, фокусы располагаются на оси
ординат. Расстояние между фокусами
![]() .
.
Эксцентриситет эллипса равен
![]() .
.
Пример
Установить, что данное уравнение определяет гиперболу. Найти координаты ее центра, полуоси, эксцентриситет.
![]()
Решение:
Перегруппируем слагаемые
![]() .
Вынесем коэффициент при старших степенях
за скобку
.
Вынесем коэффициент при старших степенях
за скобку
![]() .
.
В каждой из полученных скобок добавим
слагаемые, так чтобы получился полный
квадрат, воспользовавшись формулами
сокращенного умножения
![]() и
и
![]() .
.
В нашем случае
![]() .
.
Вынесем за скобки слагаемые, не входящие в полный квадрат
![]() .
.
Применим формулы сокращенного умножения
![]() Перенесем свободный член в правую часть.
Перенесем свободный член в правую часть.
![]() Разделим обе части уравнения на (–144).
Разделим обе части уравнения на (–144).
![]() .
Произведя сокращение в дробях, получим
.
Произведя сокращение в дробях, получим
![]() .
.
Введем новые обозначения

Получим
![]() .
Это каноническое уравнение гиперболы
в новой системе координат, полученной
параллельным переносом старой системы
координат, а именно оси
.
Это каноническое уравнение гиперболы
в новой системе координат, полученной
параллельным переносом старой системы
координат, а именно оси
![]() на две единицы вправо, оси
на две единицы вправо, оси
![]() на одну единицу вниз. Новый центр
находится в точке
на одну единицу вниз. Новый центр
находится в точке
![]() .
.
Полуоси гиперболы равны соответственно
![]() и
и
![]() .
Так как знак минус стоит перед
.
Так как знак минус стоит перед
![]() ,
значит, ось
,
значит, ось
![]() есть мнимая ось, а ось
есть мнимая ось, а ось
![]() – действительная ось, значит, фокусы
располагаются на оси ординат. Расстояние
между фокусами
– действительная ось, значит, фокусы
располагаются на оси ординат. Расстояние
между фокусами
![]() .
.
Эксцентриситет гиперболы равен
![]() .
.

§ 4. Плоскость
Пусть в пространстве задана некоторая плоскость P и декартова система координат.
1. Положение плоскости в пространстве
однозначно определено, если задана
некоторая точка
![]() ,
принадлежащая плоскости Р, и некоторый
вектор
,
принадлежащая плоскости Р, и некоторый
вектор
![]() ,
перпендикулярный этой плоскости (рис.
20). Пусть
,
перпендикулярный этой плоскости (рис.
20). Пусть
![]() – произвольная точка плоскости. Тогда
вектор
– произвольная точка плоскости. Тогда
вектор
![]() будет перпендикулярен вектору
будет перпендикулярен вектору
![]() и, следовательно,
и, следовательно,
![]() Так как
Так как
![]() ,
,
![]() ,
то получим уравнение
,
то получим уравнение
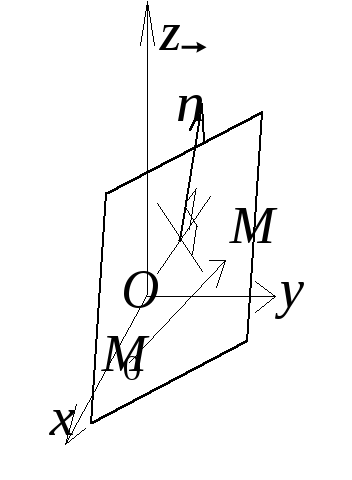
Рис. 20
![]() . (1)
. (1)
Уравнение (1) есть уравнение плоскости,
проходящей через точку
![]() перпендикулярно вектору
перпендикулярно вектору
![]() .
.
Заметим, что вектор
![]() называется нормальным вектором плоскости
Р.
называется нормальным вектором плоскости
Р.
2. Если в уравнении (1) раскрыть скобки
и обозначить:
![]() ,
то получим общее уравнение плоскости:
,
то получим общее уравнение плоскости:
![]() . (2)
. (2)
Пусть заданы плоскости P1:
![]() и P2:
и P2:
![]() .
Тогда для того чтобы P1||P2
(P1P2),
необходимо и достаточно, чтобы
.
Тогда для того чтобы P1||P2
(P1P2),
необходимо и достаточно, чтобы
![]()
![]() .
.
3. Положение плоскости в пространстве
также однозначно определено, если заданы
три точки
![]() ,
,
![]() ,
,
![]() ,
принадлежащие плоскости P
и не лежащие на одной прямой. Пусть
,
принадлежащие плоскости P
и не лежащие на одной прямой. Пусть
![]() − произвольная точка плоскости. Тогда
векторы
− произвольная точка плоскости. Тогда
векторы
![]() ,
,
![]() ,
,
![]() компланарны и
компланарны и
![]() .
.
Так как
![]() ,
,
![]() ,
,
![]() ,
то последнюю формулу можно переписать
в виде
,
то последнюю формулу можно переписать
в виде
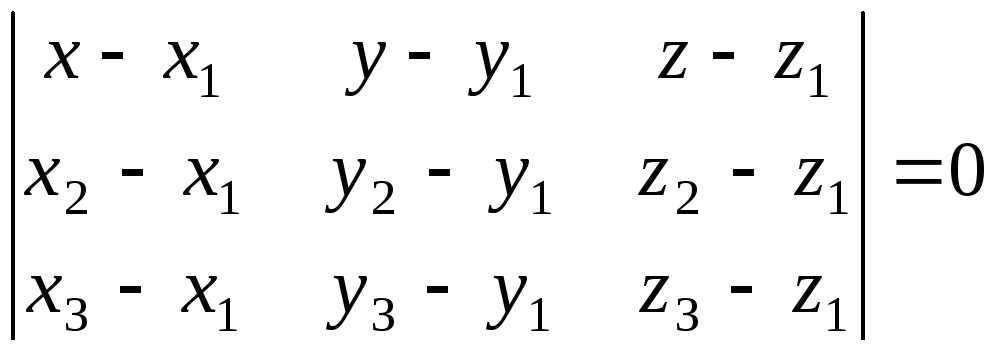 . (3)
. (3)
Уравнение (3) есть уравнение плоскости,
проходящей через три известные точки
![]() ,
,
![]() ,
,
![]() .
.
Пример
Найти угол между плоскостями P
и Q, заданными уравнениями
![]() и
и
![]() .
.
Решение:
Угол между плоскостями P
и Q равен углу между
нормальными векторами этих плоскостей,
т.е. между векторами
![]() ,
,
![]() .
.
Находим:
![]() ,
,
![]() .
.