


Сканирующая зондовая микроскопия, спектроскопия и литография
Сборник лабораторных работ по курсу «Физика»
(для программного обеспечения под Mac OS X)
2 августа 2008 г. Copyright © «НТ-МДТ»
Сайт: http://www.ntmdt.com
Общие вопросы: spm@ntmdt.ru
Тех.поддержка: support@ntmdt.ru
ЗАО «Нанотехнология-МДТ» 124460,Москва, Зеленоград, корп.167
Тел.: 8-(495) 535-03-05, 535-83-69, Факс: 8-(495) 535-64-10
Сканирующая зондовая микроскопия, спектроскопия и литография. Учебное пособие
В данном учебном пособии представлены лабораторные работы, посвященные изучению методов сканирующей зондовой микроскопии, включая спектроскопические измерения и процессы литографии, а также их применение для исследований и модификации микро- и наноструктур.
Учебное пособие предназначено для студентов старших курсов и магистартуры, обучающихся по специальностям:
20200 "Нанотехнология в электронике",
073800 "Наноматериалы",
200100 "Микроэлектроника и твердотельная электроника",
201900 "Микросистемная техника".
Лабораторные работы проводятся на базе сканирующего зондового микроскопа NanoEducator, разработанного специально для учебно-научных целей компанией «НТ-МДТ».
В ходе подготовки к лабораторной работе каждый студент должен понять цель работы, изучить содержание работы и основные физические закономерности используемых или исследуемых явлений. Результаты экспериментов представляются на проверку преподавателю.
К выполнению лабораторных работ допускаются студенты, изучившие:
-правила техники безопасности при работе с электрическими установками до 1000 вольт,
-основные правила безопасности.
Лабораторные работы разрабатывали:
- м.н.с. А.В. Круглов, с.н.с. к.ф-м.н. Д.О. Филатов, м.н.с. Гущина Ю.Ю, к.б.н. Звонкова М.Б. (Нижегородский Государственный Университет
им. Н.И. Лобачевского, Научно-образовательный центр «Физика твердотельных наноструктур»).
- д.ф-м.н., проф. А.О. Голубок (Санкт-Петербургский государственный университет информационных технологий механики и оптики), к.ф-м.н. М.Л. Фельштын, к.ф-м.н. О.М. Горбенко, с.н.с. И.Д. Сапожников.
Компания «НТ–МДТ» благодарит за целевую и финансовую поддержку Министерство Образования и Науки РФ, Фонд Поддержки Образования и Науки (Алферовский фонд) и Фонд Содействия Развитию Малых Форм Предприятий в Научно-Технической Сфере.
ПРОЧТИТЕ
Замечание:
Комплект поставки Вашего прибора может отличаться от описанного в данном руководстве. Обратитесь к спецификации Вашего контракта за более точной информацией.
Copyright:
Никакая часть данного руководства, ни для каких целей не может быть воспроизведена или передана в любой форме и любыми средствами, электронными или механическими, включая фотокопирование и видеозапись, без письменного разрешения компании “НТ-МДТ”.
ОСНОВНЫЕ ПРАВИЛА БЕЗОПАСНОСТИ
•При работе с устройством для травления игл, соблюдайте правила безопасности работы с химическими реактивами.
•Будьте осторожны при работе с зондом! Соблюдайте правила безопасности работы с колющими предметами.
•Соблюдайте правила безопасности работы с электроприборами. Перед началом работы с прибором обеспечьте его заземление. Перед присоединением/отсоединением разъемов, выключите прибор. Отсоединение или присоединение разъемов во время работы прибора может привести к повреждению электронной схемы и выходу прибора из строя.
•Не разбирайте самостоятельно никакие части прибора! Разбирать изделия разрешено только специалистам, сертифицированным компанией «НТ-МДТ».
•Не подключайте к прибору дополнительные устройства без консультации со специалистами компании «НТ-МДТ».
•Оберегайте прибор от сильных механических воздействий. Помните, что, что толщина стенок сканера составляет всего 0,5 мм.
•Оберегайте прибор от воздействия предельных температур, попадания жидкости.
•При транспортировке вкрутите транспортировочный винт на нижней части
основания измерительной головки (транспортировочный винт входит в комплект поставки). Обеспечьте упаковку прибора, исключающую повреждение при транспортировке.
КОМПЛЕКТ ЭКСПЛУАТАЦИОННОЙ ДОКУМЕНТАЦИИ
•Руководство пользователя
•Учебное пособие

Оглавление
СКАНИРУЮЩАЯ ЗОНДОВАЯ МИКРОСКОПИЯ, СПЕКТРОСКОПИЯ И ЛИТОГРАФИЯ.
Учебное пособие по физике
Оглавление
1. |
Получение первого СЗМ изображения. |
|
|
Обработка и представление результатов эксперимента...................................... |
1-1 |
2. |
Исследование поверхности твердых тел методом |
|
|
сканирующей туннельной микроскопии............................................................... |
2-1 |
3. |
Исследование поверхности твердых тел методом |
|
|
атомно-силовой микроскопии в неконтактном режиме....................................... |
3-1 |
4. |
Артефакты в сканирующей зондовой микроскопии............................................ |
4-1 |

Содержание
1.Получение первого СЗМ изображения. Обработка и представление результатов эксперимента
Содержание
1.ПОЛУЧЕНИЕ ПЕРВОГО СЗМ ИЗОБРАЖЕНИЯ. ОБРАБОТКА И
ПРЕДСТАВЛЕНИЕ РЕЗУЛЬТАТОВ ЭКСПЕРИМЕНТА |
..........................................................1-1 |
|
1.1. |
ЦЕЛИ РАБОТЫ ............................................................................................................................... |
1-3 |
1.2. |
ИНФОРМАЦИЯ ДЛЯ ПРЕПОДАВАТЕЛЯ........................................................................................... |
1-3 |
1.3. |
СОДЕРЖАНИЕ РАБОТЫ.................................................................................................................. |
1-3 |
1.4. |
МЕТОДИЧЕСКИЕ УКАЗАНИЯ........................................................................................................ |
1-29 |
1.5. |
ТЕХНИКА БЕЗОПАСНОСТИ........................................................................................................... |
1-29 |
1.6. |
ЗАДАНИЕ..................................................................................................................................... |
1-29 |
1.7. |
КОНТРОЛЬНЫЕ ВОПРОСЫ............................................................................................................ |
1-29 |
1.8. |
ЛИТЕРАТУРА............................................................................................................................... |
1-30 |
1-1

СЗМ NanoEducator. Учебное пособие по физике
Лабораторная работа была разработана Санкт-Петербургским государственным университетом информационных технологий механики и оптики и Нижегородским Государственным Университетом им. Н.И. Лобачевского.
Одной из важнейших задач современной физики является исследование поверхности твердых тел. Необходимость в этом возникла, с одной стороны, в связи с переходом современной технологии изготовления полупроводниковых приборов на субмикронный уровень. Поверхность чипа, а не его объем, стала играть определяющую роль при выполнении им логических функций, и при взаимодействии с другими элементами.
Поверхность и происходящие на ней явления представляют интерес и с точки зрения фундаментальной физики, поскольку атомная структура кристалла, то есть расположение и свойства его решеточных слоев вблизи поверхности совершенно иное, чем в объеме.
Традиционные методы исследования поверхности, такие как рентгеновская или ионная дифракция, дифракция медленных электронов, электронная оже-спектроскопия, позволяют получать усредненную по поверхности образца картину расположения атомов, но не дают возможности своими глазами увидеть атомную структуру. Все эти методы, работающие только в вакууме, позволяет разрешать детали нанометрового масштаба, но при этом возможно повреждение образца пучком высокоэнергетических частиц. Кроме того, они не позволяет непосредственно получать информацию о высоте поверхностных деталей.
Частично эти проблемы удалось решить с помощью сканирующей туннельной микроскопии (СТМ). В начале 1980-х годов СТМ ослепляла мир первыми экспериментально полученными изображениями поверхности кремния с атомным разрешением.
Однако новые, практически неограниченные возможности открылись с изобретением атомного силового микроскопа (АСМ), с помощью которого стало возможным изучать рельеф не только проводящих, но и диэлектрических материалов. С тех пор области применения сканирующей зондовой микроскопии (СЗМ) значительно расширились.
В настоящее время СЗМ используется в большом многообразии дисциплин, как в фундаментальных научных исследованиях, так и прикладных высокотехнологичных разработках. Многие научно-исследовательские институты страны оснащаются аппаратурой для зондовой микроскопии. В связи с этим постоянно растет спрос на высококлассных специалистов. Для его удовлетворения фирмой НТ-МДТ (г. Зеленоград, Россия) разработана и создана специализированная учебно-научная лаборатория сканирующей зондовой микроскопии NanoEducator.
СЗМ NanoEducator специально разработан для проведения лабораторных работ студентов. Приборы ориентированы на студенческую аудиторию: они полностью управляются с помощью компьютера, имеет простой и наглядный интерфейс, анимационную поддержку, предполагают поэтапное освоение методик, отсутствие сложных настроек и недорогие расходные материалы.
1-2
1.0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Вданной лабораторной работе Вы рассмотрите основы сканирующей зондовой микроскопии, изучите конструкцию и принципы работы прибора NanoEducator, а так же под присмотром преподавателя получите свое первое СЗМ изображение поверхности твердого тела и научитесь основам обработки и представления экспериментальных результатов.
1.1.Цели работы
1.Изучение основ сканирующей зондовой микроскопии.
2.Изучение конструкции и принципов работы прибора NanoEducator.
3.Получение первого СЗМ изображения.
4.Получение навыков обработки и представления экспериментальных результатов.
1.2.Информация для преподавателя1
Получение изображения выполняется на одном приборе под присмотром преподавателя, обработка экспериментальных данных каждым студентом индивидуально. Практическая часть работы выполняется на одном занятии и занимает 4 часа. Образец для исследования: тестовый образец TGZ3 или любой другой по выбору преподавателя. До начала работы необходимо подобрать зонд с наиболее характерной амплитудно-частотной характеристикой (одиночный симметричный максимум), получить изображение поверхности исследуемого образца.
1.3. Содержание работы
Основы сканирующей зондовой микроскопии (принципы СЗМ, основные компоненты СЗМ и их назначение).
Знакомство с конструкцией СЗМ NanoEducator (общая конструкция, универсальный датчик туннельного тока и силового взаимодействия, СЗМ сканер, механизм подвода зонда к образцу). Конструкция и принципы действия зондового датчика и сканера прибора NanoEducator объясняются на анимационных клипах.
Знакомство с программой управления прибором NanoEducator (режим получения и режим обработки данных, работа со атомно-силовым микроскопом (АСМ) и сканирующим туннельным микроскопом (СТМ)).
Получение первого СЗМ изображения в режиме АСМ (установка образца, установка зонда (зондового датчика), позиционирование зонда относительно образца (выбор места сканирования, первоначальный подвод зонда к образцу), быстрое сближение, поиск резонанса и установление рабочей частоты).
1 Прибор NanoEducator полноценно работает только в учетной записи пользователя «Администратор компьютера».
1-3

СЗМ NanoEducator. Учебное пособие по физике
Выбор параметров скана (критерии выбора размера скана, числа точек на линии и линий в скане, скорости сканирования, параметры цепи обратной связи (Усиление ОС), получение СЗМ изображения.
Обработка и анализ полученных изображений. Устранение из изображения артефактов сканирования. Способы графического представления изображений. Количественная характеризация СЗМ изображений.
Отчет по работе должен содержать общие сведения о методе СЗМ, а также описание конструкции и принципов работы прибора NanoEducator. В практической части студент должен отразить полученные навыки обработки и анализа экспериментальных результатов.
Основы сканирующей зондовой микроскопии
Для детального исследования поверхности твердых тел существует много разнообразных методов. Микроскопия, как средство получения увеличенного изображения, зародилась еще XV в. когда впервые были изготовлены простые увеличительные стекла для изучения насекомых. В конце XVII в. Антонио ван Левенгук изготовил оптический микроскоп, который позволял установить существование отдельных клеток, болезнетворных микробов и бактерий [Лит. 1-1]. Уже в 20 веке были разработаны методы микроскопии с помощью электронных и ионных пучков [Лит. 1-2].
Во всех описанных методах применяется следующий принцип: освещение исследуемого объекта потоком частиц и его последующее преобразование. В сканирующей зондовой микроскопии использован другой принцип – вместо зондирующих частиц в ней используется механический зонд, игла [Лит. 1-3]. Образно выражаясь, можно сказать, что, если в оптическом или электронном микроскопах образец осматривается, то в СЗМ – ощупывается.
Другим важным принципом, отраженным в названии метода СЗМ, является принцип сканирования, т.е. получение не усредненной информации об объекте исследования, а дискретное (от точки к точке, от линии к линии) перемещение зонда и считывание информации в каждой точке.
Общая конструкция сканирующего зондового микроскопа
СЗМ состоит из следующих основных компонентов (Рис. 1-1): 1 – зонд; 2 – образец; 3 – пьезоэлектрические двигатели x, y, z для прецизионного перемещения зонда над поверхностью исследуемого образца; 4 – генератор развертки, подающий напряжения на пьезодрайверы x и y, обеспечивающие сканирование зонда в горизонтальной плоскости; 5 – электронный датчик, детектирующий величину локального взаимодействия между зондом и образцом; 6 – компаратор, сравнивающий текущий сигнал в цепи датчика V(t) с изначально заданным VS, и, при его отклонении, вырабатывающий корректирующий сигнал Vfb; 7 – электронная цепь обратной связи, управляющая положением зонда по оси z; 8 – компьютер, управляющий процессом сканирования и получением изображения (9).
1-4

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
|
|
3 |
|
|
4 |
|
|
|
|
|
|
9 |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
7 ОС |
8 |
|
|
|
|
|
|||
z |
|
|
|
Vfb |
||
|
1 |
|
5 |
ЭС |
V(t) |
|
|
|
|
|
|||
|
|
|
|
|
||
2 |
|
|
|
|
6 |
|
|
|
|
|
|
||
VS
Рис. 1-1. Общая схема сканирующего зондового микроскопа. 1 – зонд; 2 – образец; 3 – пьезоэлектрические двигатели x, y, z; 4 – генератор напряжения развертки на x, y пьезокерамики; 5 – электронный датчик; 6 – компаратор; 7 – электронная цепь обратной связи; 8 – компьютер; 9 – изображение z(x,y)
Виды датчиков
В основе сканирующей зондовой микроскопии лежит детектирование локального взаимодействия, возникающего между зондом и поверхностью исследуемого образца при их взаимном сближении до расстояния ~ λ , где λ - характерная длина затухания взаимодействия «зонд-образец». В зависимости от природы взаимодействия «зонд-образец» различают: сканирующий туннельный микроскоп (СТМ, детектируется туннельный ток), сканирующий силовой микроскоп (ССМ, детектируется силовое взаимодействие), ближнепольный сканирующий оптический микроскоп (БСОМ, детектируется электромагнитное излучение) и т.п. Сканирующая силовая микроскопия в свою очередь подразделяется на атомносиловую микроскопию (АСМ), магнитно-силовую микроскопию (МСМ), электросиловую микроскопию (ЭСМ) и другие, в зависимости от вида силового взаимодействия.
Двумя основными методами зондовой микроскопии, как уже было сказано во введении, являются СТМ и АСМ.
При измерении туннельного тока в туннельном датчике (Рис. 1-2) используется преобразователь ток-напряжение (ПТН), включенный в цепь протекания тока между зондом и образцом. Возможны два варианта включения: с заземленным зондом, когда напряжение смещения подается на образец относительно заземленного зонда или с заземленным образцом, когда напряжение смещения прикладывается к зонду относительно образца.
1-5
СЗМ NanoEducator. Учебное пособие по физике
I 
 d зонд
d зонд
образец
|
Rос |
ПТН |
|
I |
|
||
|
|
||
V |
– |
|
|
+ |
Vout |
||
|
|||
|
|
Рис. 1-2. Схема туннельного датчика
Традиционным датчиком силового взаимодействия является кремниевая микробалка, консоль или кантилевер (от англ. cantilever – консоль) с оптической схемой регистрации величины изгиба кантилевера, возникающего вследствие силового взаимодействия между образцом и зондом, расположенным на конце кантилевера (Рис. 1-3).
Рис. 1-3. Схема силового датчика
Различают контактный, неконтактный и прерывисто-контактный («полуконтактный») способы проведения силовой микроскопии. Использование контактного способа предполагает, что зонд упирается в образец. При изгибе кантилевера под действием контактных сил отраженный от него луч лазера смещается относительно центра квадрантного фотодетектора. Таким образом, отклонение кантилевера может быть определено по относительному изменению освещенности верхней и нижней половинок фотодетектора.
При использование неконтактного способа зонд удален от поверхности и находится в области действия дальнодействующих притягивающих сил. Силы притяжения и их градиенты слабее отталкивающих контактных сил. Поэтому для их детектирования обычно используется модуляционная методика. Для этого с помощью пьезовибратора кантилевер раскачивается по вертикали на резонансной
1-6
1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
частоте. Вдали от поверхности амплитуда колебаний кантилевера имеет максимальную величину. По мере приближения к поверхности вследствие действия градиента сил притяжения резонансная частота колебаний кантилевера изменяется, при этом уменьшается амплитуда его колебаний. Эта амплитуда регистрируется с помощью оптической системы по относительному изменению переменной освещенности верхней и нижней половинок фотодетектора.
При «полуконтактном» способе измерений также применяется модуляционная методика измерения силового взаимодействия. В «полуконтактном» режиме зонд частично касается поверхности, находясь попеременно как в области притяжения, так и в области отталкивания.
Существуют и другие, более простые, способы детектирования силового взаимодействия, при которых происходит прямое преобразование силового взаимодействия в электрический сигнал. Один из таких способов основан на использовании прямого пьезоэффекта, когда изгиб пьезоматериала под действием силового взаимодействия приводит к появлению электрического сигнала.
Пьезоэлектрический двигатель. Сканеры
Для контролируемого перемещения иглы на сверхмалых расстояниях в СЗМ используются пьезоэлектрические двигатели. Их задача – обеспечить прецизионное механическое сканирование зондом исследуемого образца путем перемещения зонда относительно неподвижного образца или перемещения образца относительно неподвижного зонда.
Работа большинства пьезоэлектрических двигателей, применяемых в современных СЗМ, основана на использовании обратного пьезоэффекта, который заключается в изменении размеров пьезоматериала под действием электрического поля. Основой большинства применяемых в СЗМ пьезокерамик является состав Pb(ZrTi)O3 (цирконат-титанат свинца, ЦТС) [Лит. 1-4] с различными добавками.
Удлинение закрепленной с одного конца пьезопластинки определяется выражением:
l =l Uh d31 ,
где l – длина пластины, h – толщина пластины, U – электрическое напряжение, приложенное к электродам, расположенным на гранях пьезопластины, d31 – пьезомодуль материала.
Существует много типов и форм, в которых выпускаются пьезокерамические двигатели. Каждый имеет свой уникальный пьезомодуль от 0.1 до 300 нм/В. Так, керамика с коэффициентом расширения 0.1 нм/В позволяет получить перемещение 0.1 Å при приложении напряжения 100 мВ, что достаточно для получения атомного разрешения. Для получения больших диапазонов сканирования (до нескольких сотен микрон) используется пьезокерамика с большими значениями пьезомодуля.
1-7
СЗМ NanoEducator. Учебное пособие по физике
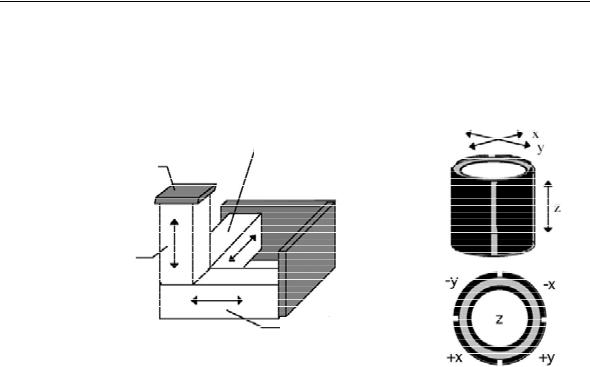
Конструкции из пьезокерамик, обеспечивающие перемещение по трем координатам x, y (в латеральной плоскости образца) и z (по вертикали), называются «сканерами». Существует несколько типов сканеров, наиболее распространенными из которых являются треногий и трубчатый (Рис. 1-4).
y-пьезоэлемент
образец
жесткая рама
z-пьезоэлемент
x-пьезоэлемент
Рис. 1-4. Основные конструкции сканеров: а) – треногий, б) – трубчатый
В треногом сканере перемещения по трем координатам обеспечивают расположенные в ортогональную структуру три независимые пьезокерамики.
Трубчатые сканеры работают посредством изгиба полой пьезоэлектрической трубки в латеральной плоскости и удлинения или сжатия трубки по оси Z. Электроды, управляющие перемещениями трубки в X и Y направлениях, размещаются в виде четырех сегментов по наружной поверхности трубки (Рис. 1-4 б). Для изгиба трубки в направлении X, на +X керамику подается напряжение для удлинения одной из ее сторон. Тот же самый принцип используется для задания движения в направлении Y. Смещения в X и Y направлениях пропорциональны приложенному напряжению и квадрату длины трубки. Движение в Z направлении генерируется подачей напряжения на электрод в центре трубки. Это приводит к удлинению всей трубки пропорционально ее длине и приложенному напряжению.
Процесс сканирования поверхности в СЗМ (Рис. 1-5) имеет сходство с движением электронного луча по экрану в электроннолучевой трубке телевизора. Зонд движется вдоль линии (строки) сначала в прямом, а потом в обратном направлении (строчная развертка), затем переходит на следующую строку (кадровая развертка). Движение зонда осуществляется с помощью сканера небольшими шагами под действием пилообразных напряжений, подаваемых с генератора развертки (обычно, цифро-аналогового преобразователя). Регистрация информации о рельефе поверхности производится, как правило, на прямом проходе.
1-8

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Y NY
.
. |
обратный ход |
прямой ход |
. |
сканера |
сканера |
3 |
|
|
2 |
|
|
1 |
2 3 . . . |
NX |
1 |
X
Рис. 1-5. Схематическое изображение процесса сканирования
К числу основных параметров, выбираемых перед началом сканирования, относятся:
-размер скана;
-число точек на линии NX и линий в скане NY, определяющие шаг сканирования ;
-скорость сканирования.
Параметры сканирования выбираются исходя из предварительных данных (размера характерных поверхностных особенностей), которые имеются у исследователя об объекте исследования.
При выборе размера скана необходимо получить наиболее полную информацию о поверхности образца, т.е. отобразить наиболее характерные особенности его поверхности. Например, при сканировании дифракционной решетки с периодом 3 мкм необходимо отобразить хотя бы несколько периодов, т.е. размер скана должен составлять 10 ÷ 15 мкм. В случае если расположение особенностей на поверхности исследуемого объекта неоднородно, то для достоверной оценки необходимо провести сканирование в нескольких отстоящих друг от друга точках на поверхности образца. При отсутствии информации об объекте исследования сначала, как правило, проводят сканирование в области, близкой к максимально доступной для отображения, с целью получения обзорной информации о характере поверхности. Выбор размера скана при повторном сканировании осуществляют исходя из данных, полученных на обзорном скане.
Число точек сканирования (NX, NY) выбирается таким образом, чтобы шаг сканирования (расстояние между точками, в которых производится считывание информации о поверхности) был меньше характерных ее особенностей, иначе произойдет потеря части информации, заключенной между точками сканирования. С другой стороны, выбор излишнего количества точек сканирования приведет к увеличению времени получения скана.
Скорость сканирования определяет скорость движения зонда между точками, в которых производится считывание информации. Излишне большая скорость может привести к тому, что система обратной связи не будет успевать отводить зонд от
1-9
СЗМ NanoEducator. Учебное пособие по физике
поверхности, что приведет к неправильному воспроизведению вертикальных размеров, а так же к повреждению зонда и поверхности образца. Малая скорость сканирования приведет к увеличению времени получения скана.
Система обратной связи
В процессе сканирования зонд может находиться над участками поверхности, имеющими различные физические свойства, в результате чего величина и характер взаимодействия зонд-образец будут изменяться. Кроме того, если на поверхности образца есть неровности, то при сканировании будет изменяться и расстояние Z между зондом и поверхностью, соответственно будет изменяться и величина локального взаимодействия.
В процессе сканирования производится поддержание постоянной величины локального взаимодействия (силы или туннельного тока) с помощью системы отрицательной обратной связи. При приближении зонда к поверхности сигнал датчика возрастает (см. Рис. 1-1). Компаратор сравнивает текущий сигнал датчика с опорным напряжением Vs и вырабатывает корректирующий сигнал Vfb, используемый в качестве управляющего для пьезопривода, который отводит зонд от поверхности образца. Сигнал для получения изображения топографии поверхности берется при этом из канала z-пьезопривода.
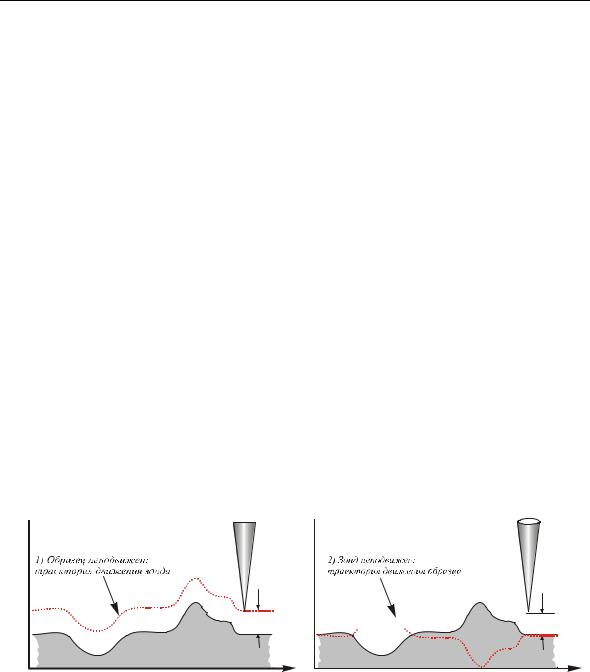
На Рис. 1-6 показана траектория движения зонда относительно образца (кривая 2) и образца относительно зонда (кривая 1) при сохранении постоянной величины взаимодействия зонд-образец. Если зонд оказывается над ямкой или областью, где взаимодействие слабее, то образец приподнимается, в противном случае - образец опускается.
Z

 Z
Z
Z 






 Z
Z
Рис. 1-6. Траектория относительного движения зонда и образца в процессе поддержания системой обратной связи постоянного локального взаимодействия
Отклик системы обратной связи на возникновение сигнала рассогласования Vfb=V(t) – VS определяется константой цепи обратной связи K (в приборе NanoEducator - Усиление ОС) или несколькими такими константами. Конкретные значения K зависят от особенностей конструкции конкретного СЗМ (конструкции и характеристик сканера, электроники), режима работы СЗМ (размера скана, скорости сканирования и т.п.), а также особенностей исследуемой поверхности (степень шероховатости, масштаб особенностей топографии, твердость материала и пр.).
В целом, чем больше значение K тем точнее цепь обратной связи отрабатывает черты сканируемой поверхности и тем достовернее данные, получаемые при сканировании. Однако при превышении некоторого критического значения K система обратной связи проявляет склонность к самовозбуждению, т.е. на линии скана наблюдается зашумленность.
1-10

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Формат СЗМ данных, способы обработки и представления результатов эксперимента
Информация, полученная с помощью сканирующего зондового микроскопа, хранится в виде СЗМ кадра – двумерного массива целых чисел Zij (матрицы). Каждому значению пары индексов ij соответствует определенная точка поверхности в пределах поля сканирования. Координаты точек поверхности вычисляются с помощью простого умножения соответствующего индекса на величину расстояния между точками, в которых производилось считывание информации. Как правило, СЗМ кадры представляют собой квадратные матрицы, имеющие размер 200x200 или 300х300 элементов.
Визуализация СЗМ кадров производится средствами компьютерной графики, в основном, в виде двумерных яркостных (2D) и трехмерных (3D) изображений. При 2D визуализации каждой точке поверхности Z=f(x,y) ставится в соответствие тон определенного цвета в соответствии с высотой точки поверхности (Рис. 1-7 а). При 3D визуализации изображение поверхности Z=f(x,y) строится в аксонометрической перспективе с помощью пикселей или линий. Наиболее эффективным способом раскраски 3D изображений является моделирование условий подсветки поверхности точечным источником, расположенным в некоторой точке пространства над поверхностью (Рис. 1-7 б). При этом удается подчеркнуть отдельные малые особенности рельефа.
a) |
б) |
Рис. 1-7. Способы графического представления СЗМ-изображений: а) – 2D, б) – 3D с боковой подсветкой
1-11

СЗМ NanoEducator. Учебное пособие по физике
СЗМ изображения, наряду с полезной информацией, содержат также много побочной информации, искажающей данные о морфологии и свойствах поверхности. На Рис. 1-8 схематически представлены возможные искажения в СЗМ изображениях поверхности, обусловленные неидеальностью аппаратуры и внешними паразитными воздействиями [Лит. 1-5].
Рис. 1-8. Возможные искажения в СЗМ изображениях
СЗМ изображения, как правило, содержат постоянную составляющую, которая не несет полезной информации о рельефе поверхности, а отражает точность подвода образца в середину динамического диапазона перемещений сканера по оси Z. Постоянная составляющая удаляется из СЗМ кадра программным способом.
Изображения поверхности, получаемые с помощью зондовых микроскопов, как правило, имеют общий наклон. Это может быть обусловлено несколькими причинами. Во-первых, наклон может появляться вследствие неточной установки образца относительно зонда или неплоскопараллельности образца; во-вторых, он может быть связан с температурным дрейфом, который приводит к смещению зонда относительно образца; в-третьих, он может быть обусловлен нелинейностью перемещений пьезосканера. На отображение наклона тратится большой объем полезного пространства в СЗМ кадре, так что становятся не видны мелкие детали изображения. Для устранения данного недостатка производят операцию вычитания постоянного наклона (левелинга) (Рис. 1-9).
1-12

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
интересующая Измеренный топография Z-диапазон наклон
образц
До вычитания постоянного наклона
Интересующий Z-диапазон
После вычитания постоянного наклона
Рис. 1-9. Устранение постоянного наклона из СЗМ-изображения
Неидеальность свойств пьезосканера приводит к тому, что СЗМ изображение содержит ряд специфических искажений. В частности, поскольку движение сканера в плоскости образца влияет на положение зонда над поверхностью (по оси Z), СЗМ изображения представляют собой суперпозицию реального рельефа и некоторой поверхности второго (а часто и более высокого) порядка. Для устранения искажений такого рода методом наименьших квадратов находится аппроксимирующая поверхность второго порядка, имеющая минимальные отклонения от исходной поверхности, и затем данная поверхность вычитается из исходного СЗМ изображения.
Шумы аппаратуры, нестабильности контакта зонд-образец при сканировании, внешние акустические шумы и вибрации приводят к тому, что СЗМ изображения, наряду с полезной информацией, имеют шумовую составляющую. Частично шумы СЗМ изображений могут быть удалены программными средствами с помощью применения различных фильтров.
Конструкция сканирующего зондового микроскопа NanoEducator [Лит. 1-6]
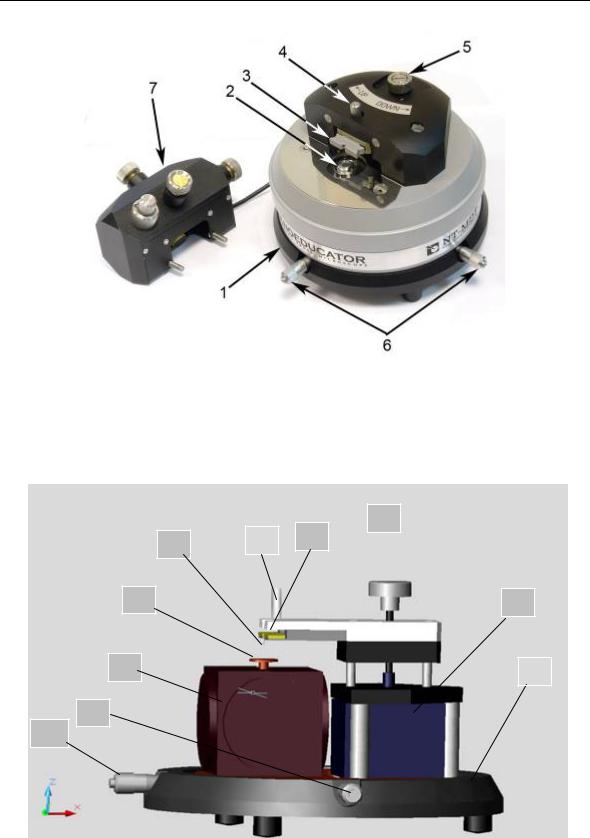
На Рис. 1-10 представлен внешний вид измерительной головки СЗМ NanoEducator и обозначены основные элементы прибора, используемые при работе. На Рис. 1-11 представлена конструкция измерительной головки. На основании 1 расположены сканер 7 с держателем образца 6 и механизм подвода 2 на основе шагового двигателя. Подвод зонда 5, закрепленного на датчике взаимодействия 4, к образцу можно также осуществлять с помощью винта ручного подвода 3. Предварительный выбор места исследования на образце осуществляется с помощью винта 8.
На Рис. 1-12 представлена функциональная схема прибора. NanoEducator состоит из измерительной головки, электронного блока, соединительных кабелей и управляющего компьютера. Видеокамера изображена как отдельное устройство, соединенное с компьютером. Сигнал от датчика взаимодействия после преобразования в предусилителе поступает в СЗМ контроллер. Управляющие сигналы от электронного блока поступают в измерительную головку. Управление электронным блоком осуществляется от компьютера через контроллер связи с PC.
1-13
СЗМ NanoEducator. Учебное пособие по физике
Рис. 1-10. (а) Внешний вид измерительной головки СЗМ NanoEducator 1 – основание, 2 – держатель образца, 3 – Датчик взаимодействия, 4 – винт фиксации датчика, 5 – винт ручного подвода,
6 – винты перемещения сканера с образцом, 7 – защитная крышка с видеокамерой
|
|
3 |
|
|
||
6 |
5 |
|
4 |
|
|
|
|
|
|||||
7 |
|
|
|
|
|
|
|
|
|
2 |
|||
|
|
|
||||
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
9
10
Рис. 1-11. Конструкция СЗМ NanoEducator:
1 – основание, 2 – механизм подвода, 3 –- винт ручного подвода, 4 – датчик взаимодействия, 5 – винт фиксации датчика, 6 – зонд, 7 – держатель образца,
8 – сканер, 9, 10 – винты перемещения сканера с образцом
1-14

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Блок питания |
+12 В, +5 В |
Усилитель |
высоковольтный Z |
|
Блок питания |
+250 В |
|
|
|
Синхродетектор |
Усилитель |
высоковольтный X,Y |
|
Блок питания |
+/-15 В |
Персональный |
|
Электронный блок |
Блок обратной связи |
Блок управления |
шаговым |
двигателем |
Контроллер связи с PC |
ЦАП, АЦП, Регистры |
компьютер |
Измерительная головка |
предусилитель |
Сканер |
Шаговый двигатель |
Видеокамера |
Зондовый датчик |
Держатель образца |
Рис. 1-12. Функциональная схема прибора NanoEducator
1-15
СЗМ NanoEducator. Учебное пособие по физике
Универсальный датчик туннельного тока и силового взаимодействия
В приборе NanoEducator применяется универсальный датчик туннельного тока и модуляционного силового взаимодействия. Датчик выполнен в виде пьезокерамической трубки длиной l=7 мм, диаметром d=1.2 мм и толщиной стенки h=0.25 мм, жестко закрепленной с одного конца. На внутреннюю поверхность трубки нанесен проводящий электрод. На внешнюю поверхность трубки нанесены два электрически изолированных полуцилиндрических электрода. К свободному концу трубки прикреплена вольфрамовая проволока диаметром 100 мкм (Рис. 1-13).
Рис. 1-13. Конструкция универсального датчика прибора NanoEducator
Свободный конец проволоки, использующейся в качестве зонда, заточен электрохимически, радиус закругления имеет величину 0.2÷0.05 мкм. Зонд имеет электрический контакт с внутренним электродом трубки, соединенным с заземленным корпусом прибора. При измерении туннельного тока пьезотрубка играет роль жесткой пассивной консоли. Электрическое смещение прикладывается к образцу относительно заземленного зонда (Рис. 1-14). Преобразователь, изображенный на рисунке, вырабатывает электрическое напряжение Uт, обуславливающее протекание туннельного тока I и выдает напряжение U пропорциональное этому току в электронный блок.
1-16

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
зонд  I
I
Uт
Образец 
 I
I
преобразователь  U I
U I
Рис. 1-14. Принцип регистрации туннельного тока
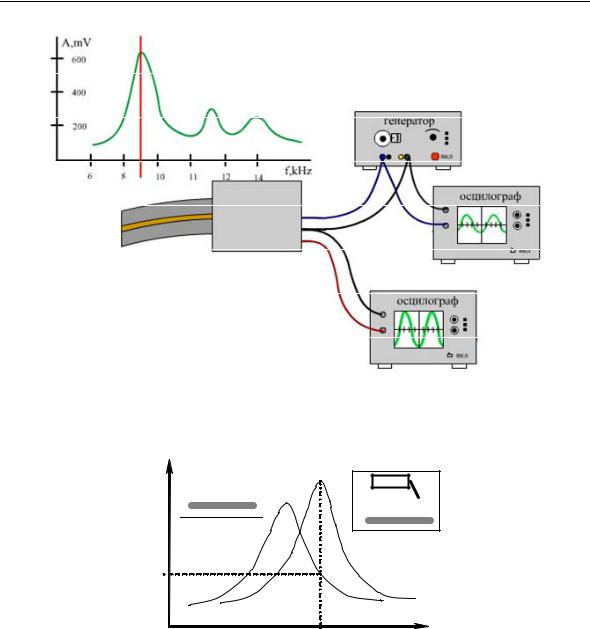
В качестве датчика силового взаимодействия одна часть пьезоэлектрической трубки используется как пьезовибратор, а другая – как датчик механических колебаний (Рис. 1-15). К пьезовибратору подводится переменное электрическое напряжение с частотой, равной резонансной частоте силового датчика. Амплитуда колебаний при большом расстоянии зонд-образец максимальна. Как видно из Рис. 1-16, в процессе колебаний зонд отклоняется от равновесного положения на величину Ао, равную амплитуде его вынужденных механических колебаний (она составляет доли микрона), при этом на второй части пьезоэлемента (датчике колебаний) возникает переменное электрическое напряжение, пропорциональное смещению зонда, которая и измеряется прибором.
При приближении зонда к поверхности образца зонд начинает касаться образца в процессе колебаний. Это приводит к смещению амплитудно-частотной характеристики (АЧХ) колебаний датчика влево по сравнению с АЧХ, измеренной вдали от поверхности (Рис. 1-16). Так как частота вынуждающих колебаний пьезотрубки поддерживается постоянной и равной ωо в свободном состоянии, то при приближении зонда к поверхности амплитуда его колебаний уменьшается и становится равной A. Эта амплитуда колебаний регистрируется со второй половины пьезотрубки.
1-17
СЗМ NanoEducator. Учебное пособие по физике
Рис. 1-15. Принцип работы пьезоэлектрической трубки в качестве датчика силового взаимодействия
Ао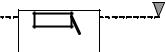
А
ωо ω
Рис. 1-16. Изменение частоты колебаний силового датчика при приближении к поверхности образца
Сканер
Способ организации микроперемещений, использующийся в приборе NanoEducator, основан на использовании зажатой по периметру металлической мембраны, к поверхности которой приклеена пьезопластинка (Рис. 1-17 а). Изменение размеров пьезопластинки под действием управляющего напряжения будет приводить к изгибу мембраны. Расположив такие мембраны по трем перпендикулярным сторонам куба и соединив их центры металлическими направляющими, можно получить 3х-координатный сканер (Рис. 1-17 б).
Каждый пьезоэлемент 1, закрепленный на гранях куба 2, может передвигать прикрепленный к нему толкатель 3 в одном из трех взаимно перпендикулярных
1-18

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
направлений – X, Y или Z при приложении к нему электрического напряжения. Как видно из рисунка, все три толкателя соединены в одной точке 4. С некоторым приближением можно считать, что эта точка перемещается по трем координатам X, Y, Z. К этой же точке прикрепляется стойка 5 с держателем образца 6. Таким образом, образец перемещается по трем координатам под действием трех независимых источников напряжения. В приборах NanoEducator максимальное перемещение образца составляет около 50-70 мкм, что и определяет максимальную площадь сканирования.
Z |
6 |
2 |
|
|
X |
пьезопластина |
Y |
1 |
3
4
а) |
б) |
Рис. 1-17. Принцип действия (а) и конструкция (б) сканера прибора NanoEducator
1-19
СЗМ NanoEducator. Учебное пособие по физике
Механизм автоматизированного подвода зонда к образцу (захват обратной связи)
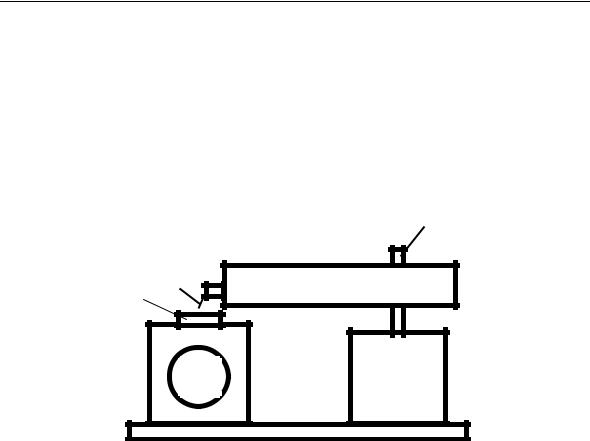
Диапазон перемещений сканера по оси Z составляет около 10 мкм, поэтому перед началом сканирования необходимо приблизить зонд к образцу на это расстояние. Для этого предназначен механизм подвода, схема которого приведена на Рис. 1-18. Шаговый двигатель 1 при подаче на него электрических импульсов вращает винт подачи 2 и перемещает планку 3 с зондом 4, приближая или отдаляя его от образца 5, установленного на сканере 6. Величина одного шага составляет около 2 мкм.
2
5 |
4 |
3 |
|
|
|
|
6 |
1 |
Рис. 1-18. Схема механизма подвода зонда к поверхности образца
Так как шаг механизма подвода значительно превосходит величину требуемого расстояния зонд-образец в процессе сканирования, то во избежание деформации зонда его подвод осуществляется при одновременной работе шагового двигателя и перемещениям сканера по оси Z по следующему алгоритму:
Система обратной связи отключается и сканер “втягивается”, т. е. опускает образец в нижнее крайнее положение:
1.Механизм подвода зонда производит один шаг и останавливается.
2.Система обратной связи включается, и сканер плавно поднимает образец, одновременно производится анализ наличия взаимодействия зонд-образец.
3.Если взаимодействие отсутствует, процесс повторяется с пункта 1.
Если во время вытягивания сканера вверх появится ненулевой сигнал, система обратной связи остановит движение сканера вверх и зафиксирует величину взаимодействия на заданном уровне. Величина силового взаимодействия, при котором произойдет остановка подвода зонда, и будет происходить процесс сканирования, в приборе NanoEducator характеризуется параметром Амплитуда останова (подавление амплитуды):
A=Ao·(1- Амплитуда останова).
1-20
1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Проведение СЗМ эксперимента [Лит. 1-6]
После вызова программы NanoEducator на экране компьютера появляется главное окно (Рис. 1-19). Программа позволяет осуществлять просмотр и обработку данных параллельно с измерениями.
Рис. 1-19. Главное окно программы NanoEducator
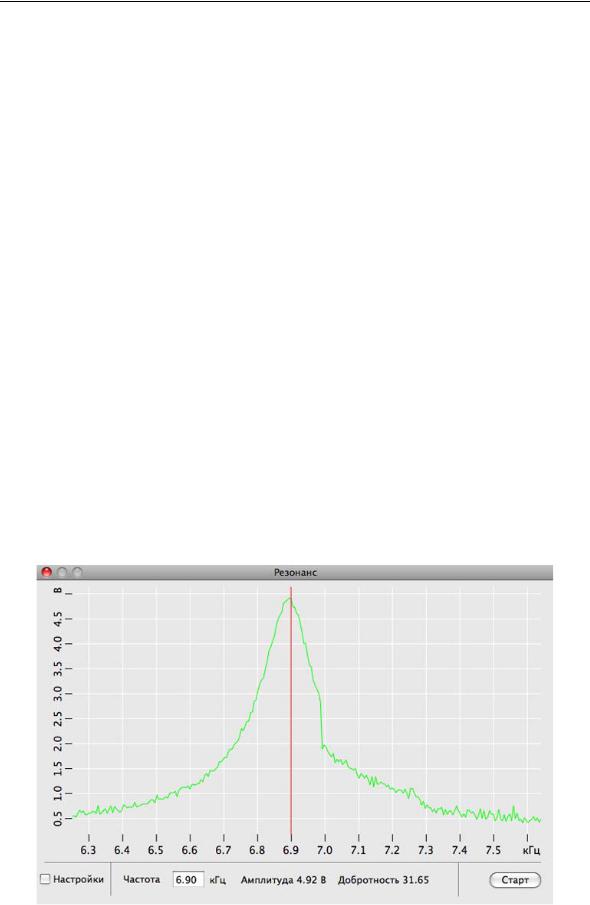
Подготовку к измерениям рекомендуется проводить, используя окно Подготовка к сканированию (Рис. 1-20). Окно открывается кнопкой  на панели основных операций.
на панели основных операций.
Рис. 1-20. Окно Подготовка к сканированию
Если контроллер прибора был включен до запуска программы NanoEducator, то при запуске программы произойдет автоматический выбор контроллера.
1-21

СЗМ NanoEducator. Учебное пособие по физике
Если программа была запущена до включения контроллера, то будет выбран режим эмуляции. В этом случае, после включении контроллера, его название следует выбрать в списке Выбор контроллера.
Для работы прибора в качестве атомно-силового микроскопа, в меню Выбор режима выберите конфигурацию АСМ.
Подготовка к АСМ измерениям заключается в выполнении следующих операций:
Установка образца
*ВНИМАНИЕ! Перед установкой образца необходимо снять датчик с зондом, чтобы не повредить зонд.
Образец прикрепляется к магнитной подложке и устанавливается на магнитный столик.
*ВНИМАНИЕ! Соблюдайте осторожность при установке держателя образца, чтобы не повредить прибор.
Установка зондового датчика
*ВНИМАНИЕ! Устанавливать датчик с зондом следует всегда после установки образца. Эту операцию рекомендуется выполнять при верхнем положении держателя датчика. Датчик переводится в верхнее положение поворотом винта ручного подвода 1 по часовой стрелке (Рис. 1-21).
Выбрав нужный зондовый датчик (держите датчик за металлические кромки основания) (см. Рис. 1-21), ослабьте винт фиксации зондового датчика 2 на крышке измерительной головки, вставьте датчик в гнездо держателя до упора, зафиксируйте зондовый датчик стопорным винтом, повернув его по часовой стрелке до легкого упора (Рис. 1-21).
Рис. 1-21. Установка зондового датчика
1-22
1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Выбор места сканирования
Для выбора участка для исследования на образце используйте винты перемещения двухкоординатного столика, расположенного в нижней части прибора.
Предварительный подвод зонда к образцу
Операция предварительного подвода не является обязательной для каждого измерения, необходимость ее выполнения зависит от величины расстояния между образцом и острием зонда. Операцию предварительного сближения желательно производить, если расстояние между кончиком зонда и поверхностью образца превышает 0.5÷1 мм. При использовании автоматизированного подвода зонда к образцу с большого расстояния между ними процесс подвода займет очень много времени.
Воспользуйтесь винтом ручного подвода для опускания зонда, контролируя расстояние между ним и поверхностью образца визуально (с помощью лупы).
Построение резонансной кривой и установка рабочей частоты
Поиск резонанса и установку рабочей частоты колебаний зонда рекомендуется выполнять перед началом каждого измерения, более того, в процессе измерений иногда возникают ситуации, требующие повторного выполнения этой операции (например, при потере контакта).
Окно Резонанс (Рис. 1-22) открывается кнопкой  на панели основных операций главного окна программы.
на панели основных операций главного окна программы.
Рис. 1-22. Окно Резонанс
1-23

СЗМ NanoEducator. Учебное пособие по физике
Выполнение операции поиска резонанса предусматривает измерение амплитуды колебаний зонда при изменении частоты вынужденных колебаний, задаваемых генератором. Запуск автоматического поиска резонансной частоты осуществляется кнопкой Старт.
В результате измерения амплитуды колебаний зонда, автоматически устанавливается частота генератора, равная частоте, при которой наблюдалась максимальная амплитуда. В процессе поиска резонансной частоты при необходимости автоматически подстраивается амплитуда выходного сигнала генератора и коэффициент усиления таким образом, чтобы амплитуда колебаний зондового датчика на резонансной частоте была не менее 2 V. Если резонансный пик недостаточно ярко выражен, или амплитуда при частоте резонанса мала (менее 1V), то необходимо изменить параметры проведения измерений и повторно провести определение резонансной частоты.
Для установки рабочей частоты вручную, выполните следующие действия:
1.Установите флажок Настройки. В результате справа от окна программы откроется панель параметров поиска резонанса (Рис. 1-23).
2.Убедитесь, что флажок точно сброшен.
Рис. 1-23. Окно Резонанс с открытой панелью параметров поиска резонанса
3.Щелкните на кнопке Старт для грубого поиска резонанса. В результате будет измерена АЧХ зонда и приблизительно установлена резонансная частота
(Рис. 1-23).
4.Убедитесь, что резонансная кривая симметрична и максимум не менее 2 В. Если резонансный пик имеет искаженную форму, или амплитуда колебаний
зонда на частоте резонанса мала (менее 2 В), измените параметры
Амплитуда колебаний и Усиление амплитуды, после чего повторно проведите определение резонансной частоты.
5.Установите флажок точно. Щелкните на кнопке Старт для точного поиска резонанса. В результате в области максимума, найденного при грубом поиске,
1-24

1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
будет измерена АЧХ зонда и рабочая частота генератора (параметр Частота) будет установлена равной резонансной частоте зонда (Рис. 1-24).
Рис. 1-24
Захват взаимодействия
Для захвата взаимодействия выполняется процедура контролируемого сближения зонда и образца с помощью механизма автоматизированного подвода.
Окно Подвод (Рис. 1-25) открывается кнопкой  на панели основных операций главного окна программы.
на панели основных операций главного окна программы.
Рис. 1-25. Окно Подвод
1-25
СЗМ NanoEducator. Учебное пособие по физике
Окно Подвод содержит элементы управления подводом зонда, а также индикации параметров, которые позволяют анализировать ход выполнения процедуры.
В окне Подвод пользователь имеет возможность наблюдать за следующими величинами:
-вытянутость сканера (индикатор Сканер) по оси Z относительно максимально возможной, принятой за единицу. Величина относительного удлинения сканера характеризуется уровнем заполнения левого индикатора цветом, соответствующим зоне, в которой находится сканер в текущий момент: зеленый цвет – рабочая зона, красный – вне рабочей зоны, желтый - переходная зона. Если индикатор красного цвета и сканер втянут, это означает, что сканер подошел слишком близко к поверхности образца, что может повлечь деформацию зонда. Если индикатор красного цвета и сканер вытянут, это означает отсутствие контакта с поверхностью.
-амплитуда колебаний зонда (индикатор Амплитуда) относительно амплитуды его колебаний в отсутствии силового взаимодействия, принятой за единицу. Величина относительной амплитуды колебаний зонда показана на правом индикаторе уровнем его заполнения зеленым цветом.
-количество шагов (Шаги), пройденных в заданном направлении.
Чтобы подвести зонд к образцу, щелкните на кнопке  . В результате:
. В результате:
-замкнется цепь обратной связи, и Z-сканер выдвинется на максимальную длину, что отобразится на индикаторе Z Сканер;
-включится шаговый двигатель, выполняющий подвод образца к зонду;
-Индикатор Шаги начнет отсчитывать пройденные шаги.
Рис. 1-26
Подвод закончится, когда амплитуда колебаний зонда уменьшится до значения параметра Амплитуда останова (устанавливается в окне Свойства). Это уменьшение будет отражено на индикаторе Амплитуда. По окончании подвода индикатор
1-26
1. 0BПолучение первого СЗМ изображения. Обработка и представление результатов эксперимента
Z Сканер займет промежуточное положение, что соответствует середине полного диапазона удлинения сканера.
Для вывода зонда из области взаимодействия и увеличения расстояния между
зондом и образцом используется кнопка  . Зонд отводится от образца на расстояние, заданное в поле Шаги.
. Зонд отводится от образца на расстояние, заданное в поле Шаги.
Сканирование
После выполнения процедуры подвода прибор готов к сканированию.
*ВНИМАНИЕ! Перед сканированием следует закрыть окна Резонанс и Подвод.
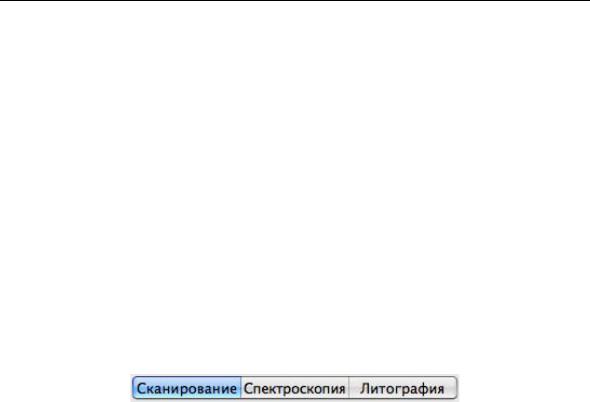
Убедитесь, что в главном окне программы нажата кнопка Сканирование
(Рис. 1-27).
Рис. 1-27
В режиме сканирования необходимо установить параметры сканирования. Эти параметры сгруппированы на панели сканирования, открывающейся кнопкой  в правой части окна программы.
в правой части окна программы.
|
Табл. 1-1. Параметры сканирования |
|
|
X0, Y0 |
Координаты начальной точки сканирования. |
|
|
Быстрый |
Меню выбора направления оси быстрого сканирования. |
|
|
Размер |
Размер области сканирования. |
|
|
Квадрат |
Если на панели параметров измерений установлен флажок |
|
Квадрат, то выбор области сканирования возможен только в |
|
форме квадрата. В противном случае возможен выбор области |
|
сканирования прямоугольной формы. |
|
|
Шаг |
Шаг сканирования – расстояние между точками измерений. |
|
|
Разрешение |
Количество точек измерений. |
|
|
Режим |
Меню выбора метода сканирования. |
|
|
Скорость |
Скорость сканирования при прямом (вперед) и обратном |
|
(назад) ходе сканера. |
|
|
Равные |
Прямой и обратный ход при сканировании могут |
|
осуществляться с разными скоростями. В случае если на |
|
панели параметров измерений установлен флажок Равные, |
|
скорость сканирования можно установить только равной для |
|
обоих направлений, в противном случае скорости можно |
|
изменять независимо друг от друга. |
|
|
|
1-27 |
СЗМ NanoEducator. Учебное пособие по физике
Усиление ОС |
Коэффициент усиления в петле обратной связи. |
|
|
Рабочая точка |
Величина силового взаимодействия между зондом и образцом |
|
в рабочем режиме. |
|
|
Z |
Индикатор выдвижения Z-сканера |
|
|
Сброс настроек |
Возвращает исходные настройки параметров. |
|
|
Область сканирования можно выбрать в пределах максимально доступной области. Для этого нажмите кнопку  на панели инструментов главного окна
на панели инструментов главного окна
программы и при помощи мыши с нажатой левой кнопкой выделите нужный участок.
Запуск сканирования осуществляется кнопкой  в главном окне
в главном окне
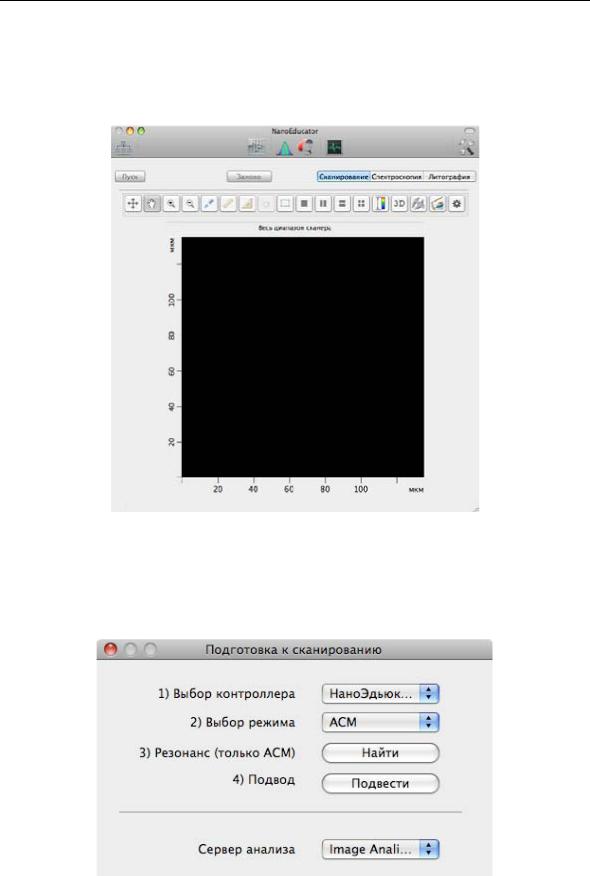
программы. В результате начнется построчное сканирование поверхности образца и в области измерений, строчка за строчкой, будет появляться изображение сканируемой поверхности (Рис. 1-28).
Рис. 1-28. Отображение сканируемой поверхности
При проведении измерений все данные сохраняются в оперативной памяти. Просмотреть полученные данные можно в окне сессии, открывающемся кнопкой
 на панели основных операций.
на панели основных операций.
1-28