

2.3. Исследование зависимости качественных показателей экстремальной системы в шаговом режиме от частоты дискретизации управляющего воздействия.
Устанавливаем постоянную времени инерционной части, равную 1сек., зону нечувствительности (-0.1 +0.1) и частоту дискретизации (период колебаний Pulse Generator – 0.1сек.).
Запускаем систему на моделирование, открываем окно Scope 1.

Рис. 21 Scope1
Частота и амплитуда колебаний на входе и на выходе объекта управления равна 2/5 и 2/5 1.5 и 0.4, потери на поиск и время выхода в зону экстремума 7 сек. Scope 1

Рис. 22 Scope1
Устанавливаем период колебаний Pulse Generator – 0.5сек.
Частота и амплитуда колебаний на входе и на выходе объекта управления равна2/5 и 2/5 1 и 0.2, потери на поиск и время выхода в зону экстремума 7 сек.
Установили период колебаний Pulse Generator – 1сек. и повторили эксперимент по определению качественных показателей шагового режима экстремальной системы.
Выполнив данную часть работы, можно сделать вывод: зависимость частоты дискретизации управляющего воздействия меняет амплитуду колебания на входе и выходе объекта управления.
2.4 Сравнение качественных показателей работы экстремальной системы в непрерывном и шаговом режимах.
Провели исследование влияния режима работы экстремальной системы на ее качественные показатели.
Сравниваем качественные показатели системы в непрерывном и шаговом режимах при следующих значениях параметров настройки: период дискретизации шагового режима – 0.1сек., зона нечувствительности - (-0.1 +0.1), постоянная времени инерционной части системы – 0.5,1,1.5. Таким образом, переменным значением в эксперименте будет величина постоянной времени инерционной части системы, остальные параметры настройки постоянные.
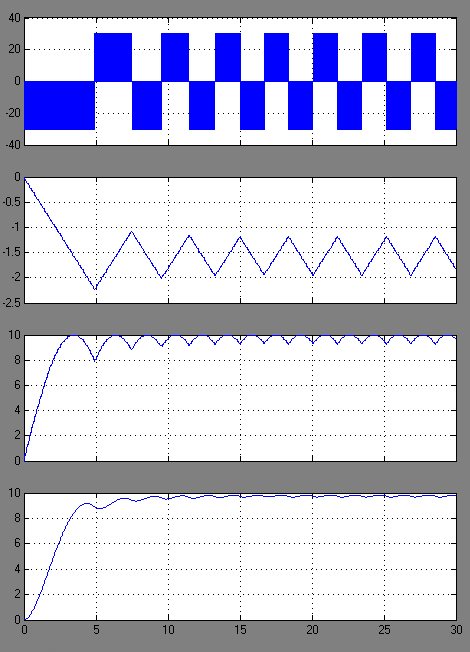
Рис. 23 Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 0.2 и 0.8 .
Частоты на входе и на выходе объекта управления равны: 2/5 и 2.25/5.
Время выхода в зону экстремума и потери на поиск 8 секунд.

Рис. 24 Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 0.2 и 0.6 .
Частоты на входе и на выходе объекта управления равны: 2/5 и 2.3/5.
Время выхода в зону экстремума и потери на поиск 8 секунд.
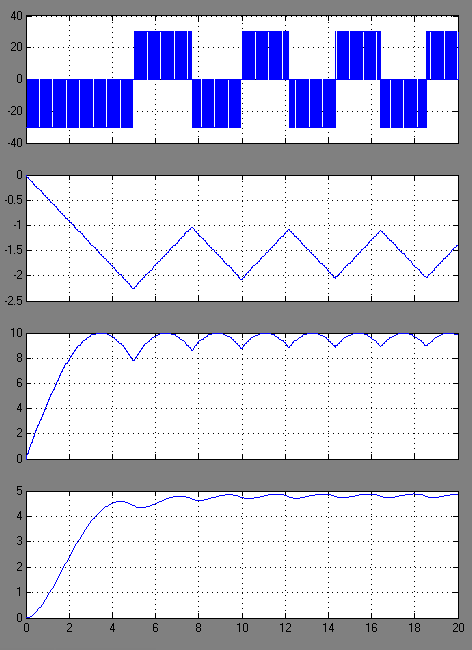
Рис. Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 0.2 и 1.1 .
Частоты на входе и на выходе объекта управления равны: 2/5 и 2/5.
Время выхода в зону экстремума и потери на поиск 8 секунд.
Вывод: в данной работе были исследованы системы управления, обеспечивающие определение области экстремума статической характеристики объекта управления и поддерживающие выходную величину объекта управления вблизи ее экстремального значения. Достоинстве пошагового метода: меньше амплитуда управляющего сигнала на входе и выходе системы.