

1.3 Исследование зависимости качественных показателей работы системы от величины зоны нечувствительности.
Установим значение постоянной времени инерционной части объекта, равное 1сек., и не меняем его во время настоящего исследования. Устанавливаем поочередно для зоны нечувствительности значения: 0.05; 0.15; 0.25; 0.35; 0.5. Для каждого из пяти значений зоны измеряем частоты и амплитуды колебаний на входе и на выходе объекта управления, время выхода в зону экстремума и потери на поиск.

Рис. 12 Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 0.7 и 0.07 .
Частоты на входе и на выходе объекта управления равны: 3/5 и 3/5.
Время выхода в зону экстремума и потери на поиск 10 секунд.

Рис. 13 Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 1.2 и 0.15
Частоты на входе и на выходе объекта управления равны: 3/5 и 3/5.
Время выхода в зону экстремума и потери на поиск 9 секунд.
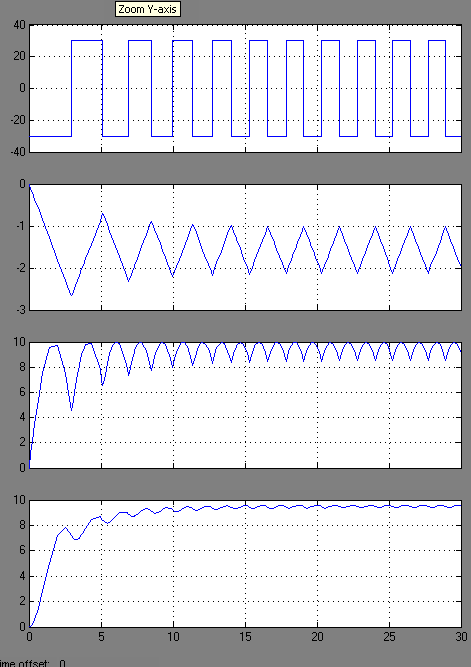
Рис. 14 Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 2 и 0.3 .
Частоты на входе и на выходе объекта управления равны: 3/5 и 2.5/5.
Время выхода в зону экстремума и потери на поиск 7 секунд.

Рис. 15 Scope 1
Амплитуды колебаний на входе и на выходе объекта управления равны: 2.2 и 0.3 .
Время выхода в зону экстремума и потери на поиск 6 секунд.
Можно сделать вывод о изменении зоны нечувствительности: при увеличении её растёт амплитуда колебаний на входе и на выходе объекта управления, уменьшается время выхода в зону экстремума и потери на поиск.
2 Исследование шаговой экстремальной системы.
2.1 Ознакомление с работой экстремальной системы в шаговом режиме.
Проверили следующие значения параметров системы: постоянная времени инерционной части объекта управления – 1сек.; величина зоны нечувствительности (-0.1 +0.1); период колебаний Pulse Generator – 0.5сек. Запустили процесс моделирования системы.

Рис. 16. XY Graph2

Рис. 17 Scope 1
Наблюдали шаговый режим работы экстремальной системы, при котором управляющее воздействие изменяется ступенчато: интервалы вращения серводвигателя (линейное изменение управляющего воздействия) чередуются с интервалами остановки серводвигателя (управляющее воздействие постоянно). Подобный режим наблюдали и в колебаниях на выходе объекта управления. Особенно рельефно проявляется шаговый режим в характере фазовой траектории, наблюдаемой в окне XY Graph 2. Процесс выхода в зону экстремума системы сопровождается пилообразными колебаниями (на фазовой плоскости по оси Y изображается скорость изменения выходного сигнала объекта управления).

Рис. 18 Scope 2
Открыли окно Scope2. Зафиксировали тот факт, что процессы в экстремальном регуляторе остаются и в шаговом режиме такими же, как и в непрерывном режиме.
2.2 Исследование влияния на работу экстремальной системы в шаговом режиме величины зоны нечувствительности экстремального регулятора.
Изменяем величину зоны нечувствительности
от исходного значения (-0.1 +0.1) в сторону
увеличения с приращением
![]() .
Фиксируем значение зоны нечувствительности,
при котором в работе системы наблюдается
срыв удержания рабочей точки в зоне
максимума +10 и переход в зону минимума
-10. Этот процесс перехода из одной точки
экстремума в другую наглядно изображается
на фазовой плоскости в окне XY
Graph 2, если увеличить
диапазон значений по оси X
до -10.
.
Фиксируем значение зоны нечувствительности,
при котором в работе системы наблюдается
срыв удержания рабочей точки в зоне
максимума +10 и переход в зону минимума
-10. Этот процесс перехода из одной точки
экстремума в другую наглядно изображается
на фазовой плоскости в окне XY
Graph 2, если увеличить
диапазон значений по оси X
до -10.

Рис. 19 XY Graph2

Рис. 20 Scope 1