

Lek_26-33_Cher
.pdfАД – амплитудный детектор
Операции настройки
Выбор К по минимуму влияния Рм на модуль |Ůви| с помощью компенсатора. Компенсатор регулируется на образцах с известными параметрами (Ркном, Рмvar). После настройки проводится градуировка – изменение Рк от минимуму до максимума (при Рм=Рмном) и изменением Кu.
Для нормальной работы индикатора И устанавливают коэффициент передачи тракта с помощью образцов.
Тема 30.
Способ проекций (амплитудно-фазовый)
Способ проекций ( амплитудно-фазовый)
Структурные схемы приборов Сравнение схем
Вопросы для самоконтроля
Проекция вектора мешающего напряжения на направление нормали к U ВН ( PМ ) в точке (
Рм ном; Рк ном) номинального значения мешающего и контролируемого факторов – MN, будет минимальна ( 0) , проекция от PK 0 .

М
K Рм
S k pk
B
К
α
Рк
α
α
N
MN – нормаль к линии влияния мешающего фактора в точке К
Если мешающий фактор будет меняться, то его проекция на линию MN будет все время одна и та же.
Пм – проекция П(ΔРм)=0;
Следовательно, от мешающего фактора мы отстроились.
Пусть контролируемый параметр имеет приращение от номинального значения К до некоторого значения В
U (PK ) SK PK KB
Sк – чувствительность к контролируемому параметру Рк –приращение контролируемого параметра
PK PK PB
П( Рк) kBsin Sk Pk sin |
- |
приращение |
проекции |
вносимого |
напряжения за счет изменения контролируемого параметра на величину |
Рк. |
|
||
Наиболее благоприятное положение точки К совпадает с точкой А ,т.е. с контрольным значением контролируемого параметра. Если К выбрано в точке А, то при номинальных значениях Рк и Рм UвыхВТП 0 . Это удобно в тех случаях, когда приращение Рк и Рм малые, т.к. можно установить нулевое начальное Uвых и даже малым приращениям Рк или
Рм будет соответствовать значительное изменение Uвых.
Наилучшие условия применения этого способа:
Годографы от Uвн(Рм, Зк) представляют собой семейство взаимно перпендикулярных прямых, тогда достигается полная отстройка от мешающего фактора и max чувствительность к контролируемому фактору. При уменьшении угла α будет уменьшаться чувствительность, что всегда бывает на практике.
Если Uвн(Рм) – не прямая, то при изменении мешающего фактора будет возникать погрешность от нелинейности годографов.
Способ эффективен при малых Рк и Рм, т.к. в этом случае малые участки непрямолинейных кривых близки к прямым.
Операции настройки:
1.Компенсация ( установка нуля) при номинальных значениях Рк и Рм. Компенсация вначале осуществляется при минимальном коэффициенте усиления до тех пор, пока при максимальном коэффициенте не достигается минимум показаний.
2.Выбор направления MN с помощью фазорегулятора, который позволяет менять Uоп так, чтобы Uвых ФД(ΔРм)=0
3.Калибровка (установка коэффициента передачи тракта) по известным образцам
Структурные схемы приборов
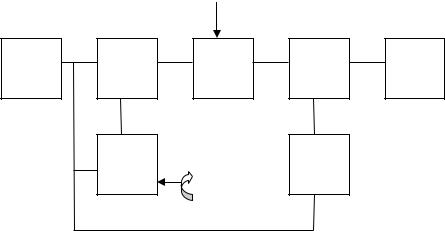
а) Прибор с использованием синхронного детектора
Рег. Ку
Г |
ВТП |
У |
СД |
И |
(ФД)
К Ампл. ФР
Ампл. ФР
Фаза
Г- генератор У – усилитель
СД – синхронный фазовый детектор И – индикатор К – компенсатор
ФР – фазорегулятор ( вращает линию MN)
Порядок действий:
-устанавливаем ноль (операция 1)
-вращением ручки ФР добиваемся минимального отклонения стрелки индикатора И (операция 2)
-при помощи образцов вращением ручки усилителя У добиваемся идентичности и согласования показаний индикатора с параметрами образца.

б) Схема с электронно-лучевой трубкой в качестве индикатора
ГЛИН – генератор линейно-изменяющегося напряжения
С ВТП - на усилителе У: синус, следовательно, на ЭЛТ – развертка синуса
Меняя фазорегулятором ФР сдвиг фаз можно менять положение синуса на горизонтальной оси
ГЛИН синхронизируется напряжением фазового регулятора ФР
U
U m sin(t t)
t |
t |
ωt |
U m sin(t t)

ЭЛТ используется в качестве измерителя мгновенных значений напряжения, т.к. эти мгновенные значения можно трактовать как проекцию U ВТП на выбранное направление,
то ЭЛТ будет выполнять все функции.
Настройка:
1.Компенсация в точке ( Рк ном; Рм ном) с помощью К по минимуму вертикального отклонения луча на экране ЭЛТ последовательным увеличением коэффициента усиления усилителя У ( при этом в ВТП находится образец с известными параметрами).
2.Выбор линии MN с помощью фазорегулятора:
а) устанавливают образец в ВТП с Рк ном, Рм ном;
б) варьируя образцы с мешающим фактором Рм добиваются минимума изменений в щели отсчета с помощью фазорегулятора
было |
стало |
сделаем |
|
Рм |
Рм |
Pм ном |
Рм |
Щель |
отсчета |
Измеряемая величина равна значению в щели отсчета ( т.е. проекции на выбранную ось)
Затем снова на контрольном образце с помощью компенсатора нужно сделать следующее:

3. Установка чувствительности и границ сортировки Устанавливаем образец с Рк=+max
|
|
в |
|
Рк |
|
|
|
|
|
|
|
|
|
U bc |
|
|
|
pk max |
||
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
М |
N |
|
|
|
|
|
|
А |
|
|
|
|
|
Значение у щели |
|
|
|
|
|
|
|
|
|
|
|
|
|
отсчета (ОВ ~МА) |
|
|
|
|
|
|
|||
Фиксируем линию (в) и говорим, что все, что ниже нее соответствует |
Рк<max |
|||||
Устанавливаем Рк= -max и фиксируем линию (с) и говорим, что все, что выше этой линии соответствует Рк>-max, все значения в щели отсчета, лежащие вне уровней B, С, свидетельствуют о наличии брака.
Этот способ используется для массовых ОК в автоматическом режиме. Как только напряжение в щели отсчета оказывается больше Uвс, включается отбраковывающее устройство.
При контроле ферромагнитных ОК кривая на экране ЭЛТ может быть несинусоидальной формы, тогда используется информация, заключенная в высших гармонических составляющих.
в) Схема с ЭЛТ в режиме точки

Uопорн, поступающие на Сд, благодаря фазовращателю ФВ, сдвинуты на π/2. На выходах СД получаются напряжения, пропорциональные: одно – действительной, другое – мнимой составляющей.
С помощью фазорегулятора ФР можно вращать вектор на экране (вращаются оси проекций). Точка на экране ЭЛТ отображает конец вектора напряжения сигнала.
Порядок настройки:
1. Компенсация на образце с номинальными параметрами, следовательно, точка на экране в начале координат при максимальном коэффициенте передач
Ручками К сдвигаем точку в ноль
2.Выбор направления отстройки MN. С помощью ФР вращают систему координат т.о, чтобы вариации мешающего фактора смещали точку только по оси Х
У
Im
Sσ
Sn
Х
Re
3.Установка чувствительности на образцах с вариацией Рк. Осуществляется регулировкой коэффициента усиления усилителя У

Фиксируем нижнюю
. границу сортировки
U (pм )
Ставит ОК
Точка “прыгает” вниз
Ставим другой ОК и точка “прыгает” вверх
Фиксируем верхнюю границу сортировки
Все, что находится вне заштрихованной области - брак
Сравнение схем
1. Наиболее простая – а сложная- в
2.Б позволяет использовать для контроля гармонику и удобна для контроля ферромагнитных ОК
3.В наиболее наглядная и пригодна для автоматической сортировки
4.Часто в приборе имеются все три схемы одновременно и оператор сам выбирает нужную
5.Приборы делают с дискретно изменяемой частотой
6.Прибор позволяет выбрать оптимальный режим
Тема 31.
Методы стабилизации при контроле МВТ
Методы стабилизации при контроле МВТ Погрешности схем с использованием амплитудо -фазовых соотношений Способы стабилизации условий и режимов контроля
Метод стабилизации значения μr для ПВТП
Способы стабилизации режимов контроля Способ стабилизации обобщенного параметра контроля.
(на примере сплошного цилиндрического ОК в проходном ВТП)
Структурная схема прибора, реализующего способ стабилизации обобщенного параметра Способ стабилизации зазора
Вопросы для самоконтроля
Погрешности схем с использованием амплитудо -фазовых соотношений
.
U вн j U0 (SR R S S ) - погрешность из-за зависимости SR, Sσ, Sμ
от значений измеряемых величин, от этого большая погрешность.
К этой погрешности добавляется погрешность компенсатора, чтобы выставить подходящую точку компенсации
1.Погрешность компенсатора
2.Погрешность нелинейности годографов – это приводит к тому, что SA, ST, Sμ меняются при изменении параметров
3.Влияние неточности градуировочных ( эталонных) образцов
Способы стабилизации условий и режимов контроля
Среди факторв, увеличивающих погрешность и снижающих надежность контроля можно выделить следующие:
1) изменение взаимного положения ВТП и ОК

-для накладных
-для ВТП с короткими катушками
2)большие технически допустимые изменения параметров ОК ( μr, σ – из-за наклепа), при этом изменяются условия контроля, смещается рабочая точка и т.д.
Меры борьбы:
стабилизация взаимного положения ОК и ВТП, путем механического ограничения перемещений ( прижимные ролики для ПВТП , подпружинивание для НВТП)
Рассмотрим подробнее меры борьбы для НВТП дальше.
Метод стабилизации значения μr для ПВТП
1. Изделие доводят до технического насыщения, при этом изменения μr уменьшаются или даже μr 1.
μr
Н
было |
Ннас |
Недостаток – трудно намагнитить до насыщения
2. Управляемое подмагничивание, но нужна система, которая бы измеряла μr.
Способы стабилизации режимов
контроля
φ