

КТОП теория
.pdfКодирование по модулю 3. В этом методе ячейкам, включаемым в последовательные фронты, можно присваивать не сами веса, а их значения по модулю 3, т. е. 1,2,3,1,2,3,…Количество разрядов на кодирование состояния ячеек также равно 3.
Проведение пути заключается в отслеживании отметок. Если ячейка имеет несколько соседних с одинаковыми отметками, то используют правило приоритетных направлений. При движении от ячейки В на рис. 11.5 используется следующее правило приоритетов: налево, вверх, налево, вниз

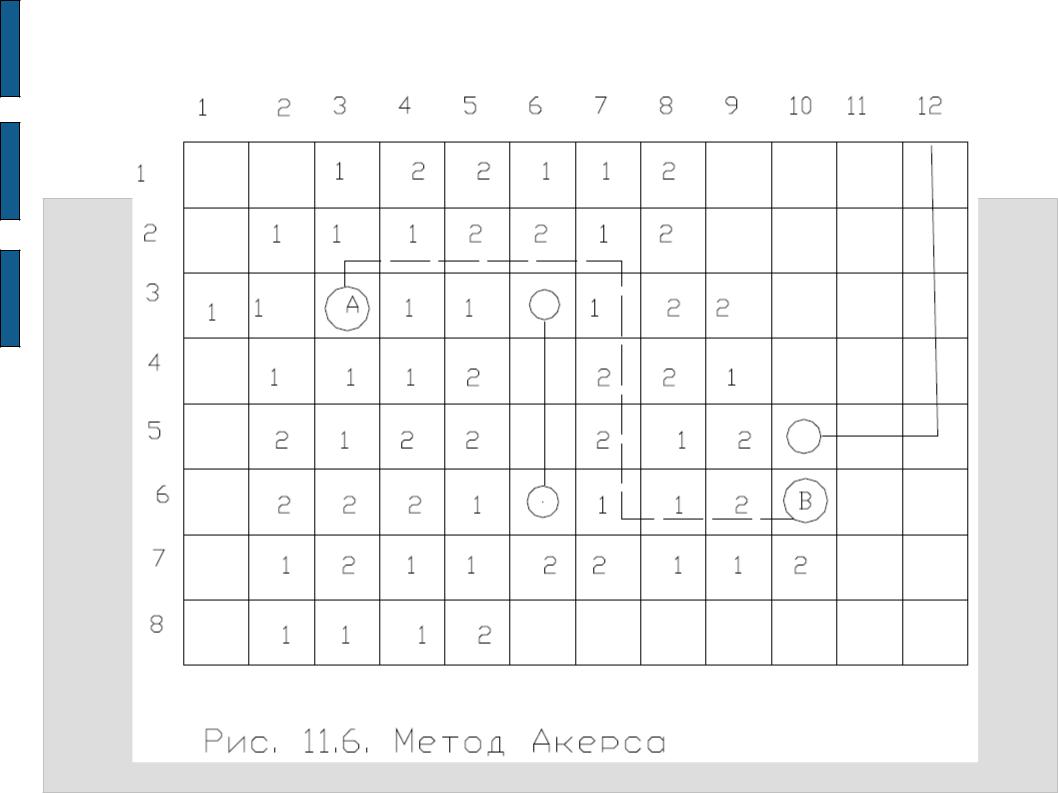
Метод Акерса. Для определения последовательности ячеек, составляющих путь, достаточно чтобы при распространении волны ячейкам присваивались значения отметок из заданной последовательности, в которой каждый член имеет разных соседей слева и справа. В методе Акерса такой последовательностью являются 1, 2, 1, 2, 1, 1, 2, 2, … При построении пути находят ячейки, входящие в заданную последовательность. В этом методе количество разрядов памяти на одну ячейку составляет всего 2. Если построение последовательности возможно по нескольким направлениям, то выбор осуществляется по приоритетам. Пример нахождения пути с использованием отметок Акерса изображен на рис. 11.6.

Модификация волнового алгоритма по способу распространения волны (первый этап). Волновой алгоритм характеризуется высокой эффективностью нахождения пути за счет исследования всех свободных ячеек ДРП, но требует значительного времени на распространение волны, Поэтому используют различные методы ускорения выполнения первого этапа алгоритма. Один из них – выбор начальной точки пуска волны. На рис. 11.7, а видно, что при выборе точки пуска волны максимально удаленной от центра платы, просматривают меньшее число свободных ячеек ДРП. По мере роста числа протрассированных цепей это становится не очевидным.
Более эффективен метод встречной волны (рис.11.7, б). Выигрыш во времени пропорционален отношению числа исследуемых ячеек при одновременном распространении волны и при распространении волны из одного источника, при этом отношение исследуемых площадей приблизительно равно 2 (см. рис. 11.7, б). Для реальных состояний ДРП выигрыш во времени может отличаться, однако в среднем оценка является объективной. Использование данной идеи незначительно усложняет алгоритм, обеспечивая существенный выигрыш во времени.
Поле распространения волны можно уменьшить, ограничивая его прямоугольником, внутри которого находятся соединяемые выводы. Начальная площадь прямоугольника обычно на 10…20 % больше площади прямоугольника, проходящего через эти выводы. Если соединение найти не удалось, то границы прямоугольника расширяют. Данный метод обладает большей эффективностью ускорения работы алгоритма по сравнению с вышеописанными методами.

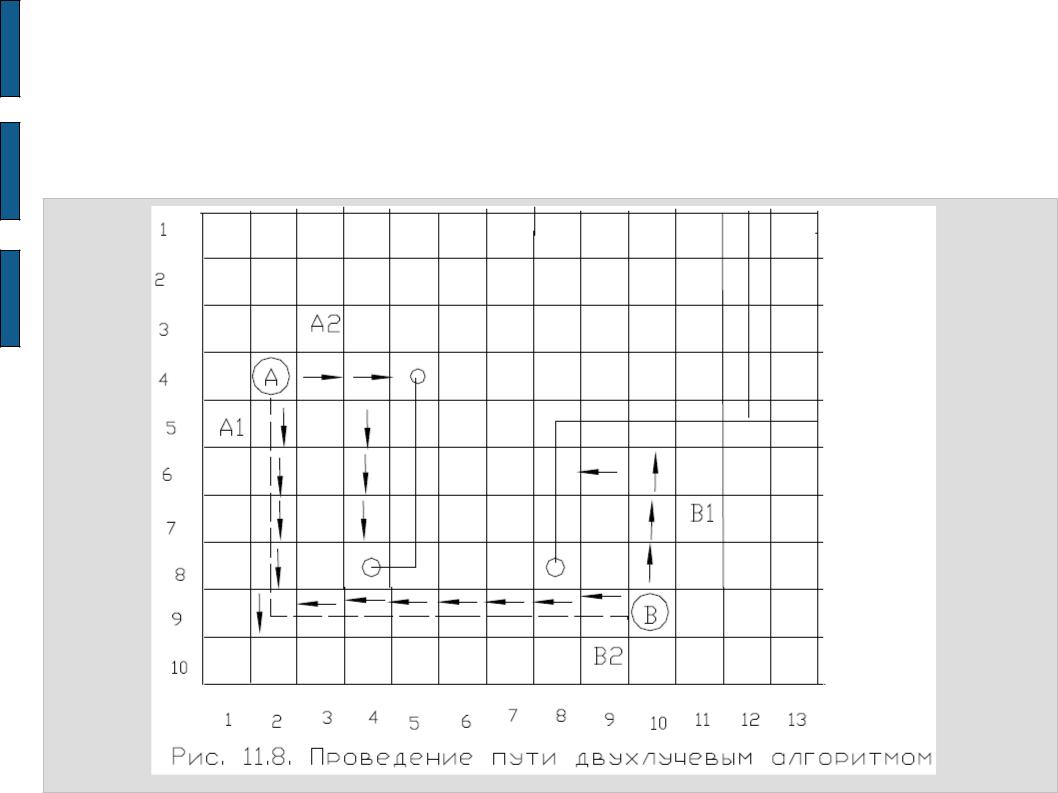
Другая идея ускорения поиска пути заключается в исследовании не всех свободных ячеек ДРП, а лишь по заданным направлениям. Один из таких алгоритмов – лучевой алгоритм. Для площадок А и В задают количество распространяемых лучей и разрешение направления их движения. При прохождении луча через ячейку ей присваивают путевую координату. На рис. 11.8, а показан пример проведения пути двухлучевым алгоритмом, причем лучу А1 разрешено движение вправо
ивниз, лучу А2 – вниз и вправо, лучу В1 – вверх и влево, лучу В2 – влево
ивверх. Вероятность нахождения пути этим алгоритмом меньше, чем волновым.

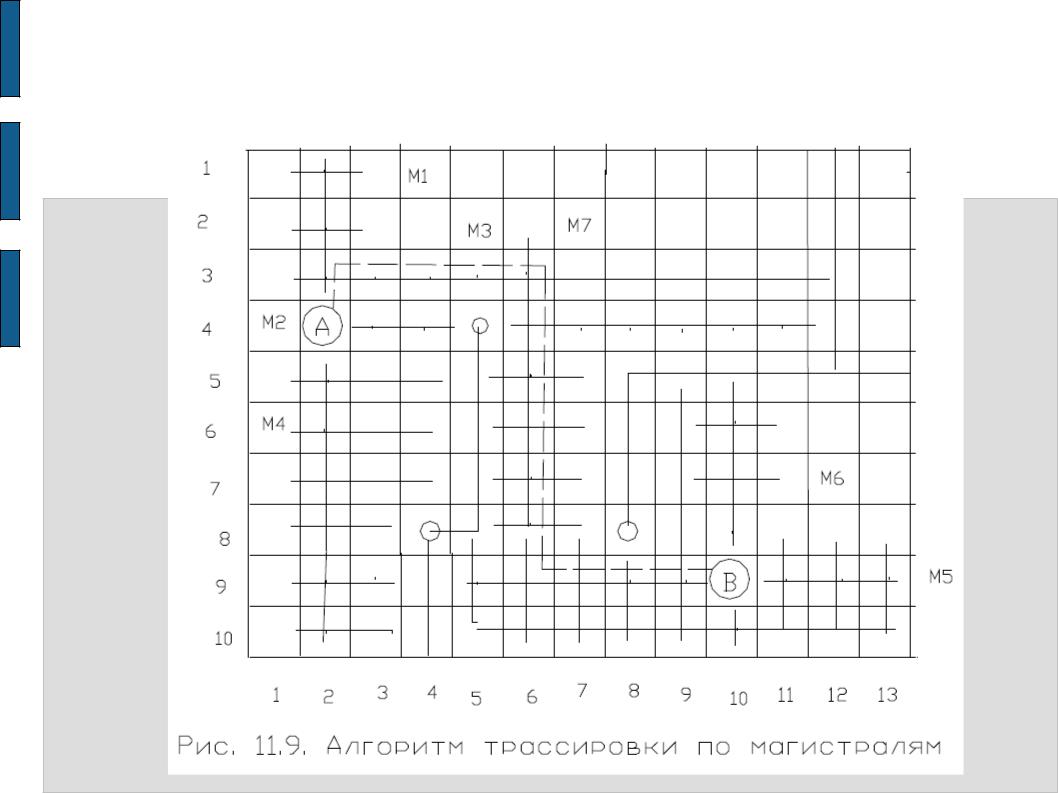
Близок к лучевому алгоритму алгоритм трассировки по магистралям (рис.11.9). Из площадок А и В по свободным ячейкам ДРП проводят горизонтальные и вертикальные лучи до их встречи или до препятствий. Если магистрали МА1 и МВ1 не пересекаются, из ячеек, из
ячеек расположенных на этих магистралях, проводят магистрали второго уровня МА2 и МВ2, причем МА2 и МВ2 ортогональны МА1 и МВ1
соответственно. Путь существует, если магистрали МА и МВ некоторого уровня пересекаются, и не существует – в противном случае.
В рассмотренном случае выполняется четырехвекторная трассировка, т. е. проводники проводятся в двух взаимно перпендикулярных направлениях. Получить составляющие путей с другими углами наклона или произвольной формы можно тремя способами: восьмивекторной трассировкой; изменением формы элементарных ячеек и определением их соседства, а также бессеточной трассировкой. Рис. 11.10 иллюстрирует эти способы.