

77.3 Математическое описание объектов управления. Цель и задача управления. Принцип отрицательной обратной связи.
МАТЕМАТИЧЕСКОЕ И АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ АВТОМАТИЗИРОВАННЫХ СИСТЕМ
2.1. Математические методы построения оптимальных и адаптивных систем управления
2.1.1. Математическое описание объектов управления
Систему автоматического управления условно можно представить состоящей из двух частей (рис. 2.1): из объекта управления (ОУ) и управляющего устройства (УУ). Под объектом управления применительно к инженерным задачам подразумевается любое техническое устройство, процессом z(t) на выходе которого надлежит управлять.
Управляющее устройство обобщает все входящие в контур системы управления элементы, используемые с целью организации процесса управления. На вход системы управления подается задающее воздействие x(t), определяющее желаемый характер управляемого процесса z(t). Управляющее устройство на основании информации о процессах х(t) и z(t), а в ряде случаев и на основании данных о возмущении f(t) рассчитывает управление u(t), с помощью которого воздействует на объект. Цель управления – поставить процесс z(t) в соответствие сигналу x(t), в рамках некоторого формального описания этого соответствия.
УУ
ОУ x(t) u(t) z(t) f(t)











Рис.2.1. Система автоматического управления
Для решения большинства задач анализа и синтеза систем управления необходимо иметь математическую модель ОУ. Построение математической модели заключается в установлении ряда соотношений, позволяющих при каждых входных воздействиях и начальных состояниях найти сигнал на выходе объекта управления.
Обычно модель получают как математическую формулировку физических законов, которым подчинена работа ОУ. В общем случае ОУ является многомерным (рис. 2.2, а и б), имеет l управляемых процессов z1(t), z2(t),.. ,zl(t); mвходных воздействий (управлений) u1(t), u2(t), ..., um(t); kвнешних возмущений f1(t), f2(t),..,fk(t).
Математическая запись физических законов, определяющих свойства непрерывного объекта, в большинстве случаев приводит к системе нелинейных дифференциальных уравнений, связывающих выходные и входные процессы и их производные. Эта система может иметь весьма сложную форму и, например, в случае объекта с независимыми выходными процессами быть представлена соотношениями вида
|
|
(1) |

При l=1объект называют одномерным.
Если
функции
 ,
являются
линейными относительно управляемых и
управляющих процессов и их производных,
то объект называют линейным
по управлению; аналогично
определяется линейность
по возмущению.
,
являются
линейными относительно управляемых и
управляющих процессов и их производных,
то объект называют линейным
по управлению; аналогично
определяется линейность
по возмущению.
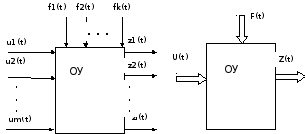
Рис. 2.2. Многомерный объект управления:
а) – скалярная форма входов/выходов; б) – векторная форма входов/выходов.
Математическая
модель (l)
в современной теории систем получила
ограниченное распространение. Гораздо
чаще l
дифференциальных уравнений (1), из которых
i-eимеет
порядок ni,
представляют
в виде системы из
 дифференциальных
уравнений первого порядка, каждое из
которых разрешено относительно
производной.
дифференциальных
уравнений первого порядка, каждое из
которых разрешено относительно
производной.
С этой целью в рассмотрение вводят пновых переменных у1 у2,...,уп, которые подбирают таким образом, чтобы систему (1) оказалось возможным представить в форме
|
|
(2) |

Эту систему называют нормальной формой Коши. Выходные процессы ОУ выражаются через введенные переменные – переменные состояния – соотношениями вида
|
|
(3) |

где
функции
 являются в общем случае нелинейными.
Система уравнений (2) должна быть
эквивалентна исходной системе (1) в том
смысле, что по решению (2) можно однозначно
устанавливать решение системы (1).
Совокупность уравнений (2) и (З) называютуравнениями
состояния.
являются в общем случае нелинейными.
Система уравнений (2) должна быть
эквивалентна исходной системе (1) в том
смысле, что по решению (2) можно однозначно
устанавливать решение системы (1).
Совокупность уравнений (2) и (З) называютуравнениями
состояния.
Переходот системы уравнений в форме (1) к уравнениям состояния не является однозначным, т. е. может быть осуществлен различными путями. Одной и той исходной системе уравнений может соответствовать несколько систем в форме Коши в зависимости от способа определения переменных состояния.
Будем полагать, что уравнения состояния объекта в общем случае в векторно-матричной форме имеют вид [3, 4]
|
|
(4) |
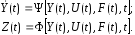
Здесь Y(t) – n-мерный вектор состояния с компонентами y1,y2,… yn; U(t) – m-мерный вектор управлений с компонентами и1, и2,..,иm; Z(t)– l-мерный вектор управляемых процессов с составляющими z1,z2,… zl; Ψ – n-мерная вектор-функция с компонентами ψ1, ψ2,… ψn; Φ– l-мерная вектор-функция с компонентами φ1,φ2,… φl.
Наличие самостоятельного аргумента tв (4) указывает на явную зависимость вектор-функцийΨ, Ф от времени, и такие объекты называют неавтономными. Физически неавтономность означает, что к объекту помимо управления U(t) приложены и другие внешние воздействия.При отсутствии аргумента tсистему (4) называют автономной.
Функции Ψ, Ф предполагаются однозначными, а уравнения состояния удовлетворяют теореме существования и единственности решения. Так как вектор Z(t) однозначно находится по Y(t), U(t), то часто ограничиваются объектами управления, описываемыми только первым из уравнений (4). При этом принимают, что выходом объекта управления является вектор состояния.