

9.3. Компенсация коэффициента мощности (cosφ)
Синхронный двигатель отличается от других машин тем свойством, что с его помощью можно регулировать потребление реактивной мощности из сети. Пояснить это положение можно следующим образом [1].
Если пренебречь падением напряжения в обмотке статора двигателя, обусловленным активным и индуктивным сопротивлениями, то ЭДС, возникающая в обмотке статора при работе двигателя без нагрузки, равна напряжению сети. Она определяется результирующим магнитным потоком в воздушном зазоре. Последний определяется намагничивающей силой (н.с.) обмотки статора и обмотки возбуждения. В том случае, когда ток возбуждения отсутствует, весь поток создается только током статора. СД при этом, так же как и АД, работающий без нагрузки, потребляет из сети реактивный ток, отстающий от напряжения на 90°. Если машину возбудить, то часть результирующей н.с. будет создана током возбуждения ротора, и намагничивающий ток статора уменьшится.
Дальнейшее увеличение тока ротора приведет к тому, что ток обмотки статора может стать размагничивающим. В противном случае поток машины оказался бы больше результирующего, соответствующего заданной ЭДС. Таким образом, при перевозбуждении СД будет потреблять размагничивающий ток, опережающий по фазе напряжение на угол 90°, т.е. машина будет работать генератором реактивной энергии.
На рисунке 9.9
приведены векторные диаграммы СД при
постоянной нагрузке на валу, неизменном
напряжении сети и разных по величине
токах возбуждения. Векторы
![]() и
и
![]() на
этом рисунке представляют собой
составляющие тока статора по продольной
и поперечной осям. В том случае, когда
СД перевозбужден (рис. 9.9а), недостаток
реакторной энергии покрывается из сети,
т.е. двигатель, кроме активного тока,
участвовавшего в создании момента на
валу, потребляет реактивный намагничивающий
ток. Ток возбуждения может быть выбран
таким образом (рис. 9.9б), что из сети
потребляется только активный ток. Если
двигатель перевозбужден (рис. 9.9 в), то
избыток реактивной энергии отдается в
сеть. Полный ток двигателя характеризуется
при этом двумя составляющими: активной
и реактивной. Последняя для двигателя
является размагничивающей.
на
этом рисунке представляют собой
составляющие тока статора по продольной
и поперечной осям. В том случае, когда
СД перевозбужден (рис. 9.9а), недостаток
реакторной энергии покрывается из сети,
т.е. двигатель, кроме активного тока,
участвовавшего в создании момента на
валу, потребляет реактивный намагничивающий
ток. Ток возбуждения может быть выбран
таким образом (рис. 9.9б), что из сети
потребляется только активный ток. Если
двигатель перевозбужден (рис. 9.9 в), то
избыток реактивной энергии отдается в
сеть. Полный ток двигателя характеризуется
при этом двумя составляющими: активной
и реактивной. Последняя для двигателя
является размагничивающей.
При
![]() ,
,
![]() и
и
![]() конец вектора тока (полного) I
на рисунке 9.9 при изменении возбуждения
двигателя скользит по линии LM.
Модуль полного тока будет минимальным
при cosφ
= 1. При этом Imin
= Iа.
конец вектора тока (полного) I
на рисунке 9.9 при изменении возбуждения
двигателя скользит по линии LM.
Модуль полного тока будет минимальным
при cosφ
= 1. При этом Imin
= Iа.
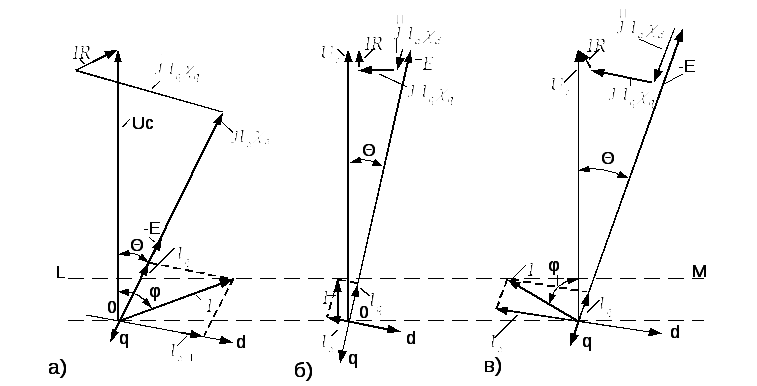
а) б) в)
Рис. 9.9. Векторные диаграммы СД
Зависимость полного тока I1 статора и cosφ СД от тока возбуждения при разных нагрузках на валу иллюстрируется U-образными характеристиками, приведенными на рисунке 9.10 [2,4].

Рис. 9.10. U-образные характеристики СД
Кривая I характеризует границу статической устойчивости двигателя; при переходе ее двигатель может выпасть из синхронизма. Кривая II представляет регулировочную характеристику при cosφ =1. Кривая III соответствует верхней границе возбуждения по условиям допустимого нагрева двигателя (обмотки возбуждения) и самораскачивания двигателя.
Отдаваемая (или потребляемая при недовозбуждении) реактивная мощность СД определяется общей формулой
![]() .
(9.6)
.
(9.6)
Более удобные для практических расчетов выражения можно подготовить с помощью векторных диаграмм СД. Для явнополюсного СД получено следующее выражение [2]:
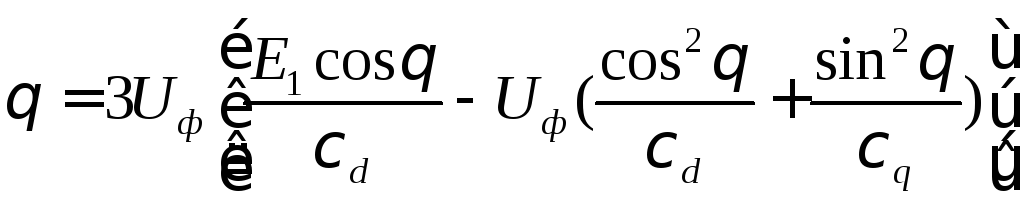 .
(9.7)
.
(9.7)
Формулу для
неявнополюсного СД можно получить из
выражения (9.7), если положить в нем
![]() [2]:
[2]:
![]() .
(9.8)
.
(9.8)
Анализируя формулы
(9.7) и (9.8) можно сделать вывод о том, что
с увеличением тока возбуждения, и тем
самым ЭДС
![]() ,
растет генерируемая СД реактивная
мощность, значение которой при этом
зависит от нагрузки СД, определяющей
угол
,
растет генерируемая СД реактивная
мощность, значение которой при этом
зависит от нагрузки СД, определяющей
угол
![]() .
.