2.3.1 Статически определимые стержни с круговой осью. Аналитическое решение.
Если
жесткий (углом поворота
![]() сечения при определении внутренних сил
можно пренебречь) стержень имеет три
силовых граничных условия, то онстатически
определим.
Первые три уравнения системы (2.3) замкнуты
и могут быть решены независимо от
остальных:
сечения при определении внутренних сил
можно пренебречь) стержень имеет три
силовых граничных условия, то онстатически
определим.
Первые три уравнения системы (2.3) замкнуты
и могут быть решены независимо от
остальных:
 . (2.3.1)
. (2.3.1)
Система (2.3.1) сводится к линейному неоднородному дифференциальному уравнению 3-го порядка
![]() .(2.3.2)
.(2.3.2)
и имеет аналитическое решение.
Силовые граничные условия по Q и N реализуются зависимостями
![]() .
.
Решение достаточно громоздко. Обычно внутренние силы в сечении вычисляют как сумму сил слева с обратным знаком, предварительно вычислив реакции опор из условий равновесия стержня.
После получения решения уравнения (2.3.2) можно вычислить перемещения, так как последние три уравнения системы (2.3) дают линейное дифференциальное уравнение (аналогичное (2.3.2))
![]() ,
,
а
кинематические граничные условия по
![]() и
и![]() реализуются зависимостями
реализуются зависимостями
![]() .
.
2.4. Численное интегрирование дифференциальных уравнений
математических моделей по методу Эйлера
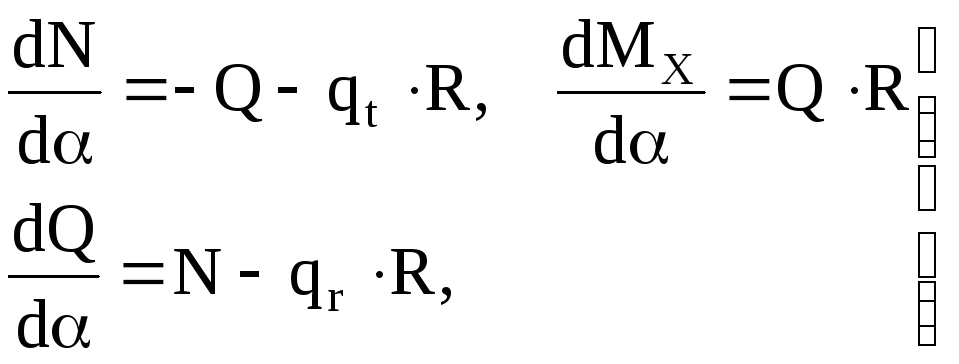
Дифференциальные уравнения в составе моделей имеют вид
![]() ,
,
где
![]() -известная функция отz
– нагрузочная функция),
-известная функция отz
– нагрузочная функция),
n - порядок системы уравнений,
![]() - искомый параметр.
- искомый параметр.
Разобьем
длину стержня на к
частей, например к=200,
т.е. шаг по
![]()
![]() достаточно мал. Из определения производной
достаточно мал. Из определения производной
![]() .
.
Но
![]() ,
следовательно
,
следовательно
![]() .
(2.3.3)
.
(2.3.3)
По
формулам (2.3.3) можно с малым шагом
![]() вычислить параметры задачи от начального
до конечного (в конце стержня) значения.
Неизвестные начальные параметры находим
из условия равенства значений конечных
параметров известным значениям – по
граничным условиям в конце стержня.
Соответствующая процедура есть во всех
математических пакетах. ВMICROSOFT
EXCEL она называется ПОИСК РЕШЕНИЯ,
вычислить параметры задачи от начального
до конечного (в конце стержня) значения.
Неизвестные начальные параметры находим
из условия равенства значений конечных
параметров известным значениям – по
граничным условиям в конце стержня.
Соответствующая процедура есть во всех
математических пакетах. ВMICROSOFT
EXCEL она называется ПОИСК РЕШЕНИЯ,
Например, при растяжении стержня, защемленного левым концом, и свободного на правом, система (2.3.3) в соответствии с (2.2.1) имеет вид
![]() .
.
При
этом допустимо решение для неоднородного
стержня (![]() ),
),![]() ,
а
,
а![]() сначала принимаем произвольно, а затем
ищем из условия
сначала принимаем произвольно, а затем
ищем из условия![]() .
.
Аналогично для любых других моделей – любых уравнений любого порядка. Более подробно – в шаблонах второго семестра.
2.5.Вычисление перемещений в заданной точке с помощью интеграла Мора и по способу Верещагина
Постановка задачи и основные допущения
Мором предложен способ вычисления перемещений в заданной точке стержня и выбранном направлении, применимый для консервативных систем. Способ удобен для расчета перемещений в статически определимых задачах (СОЗ), когда уравнения и эпюры внутренних сил (ВС) строятся достаточно просто, и сводится к интегрированию уравнений ВС. Верещагин предложил заменить интегрирование алгебраическими операциями с площадями эпюр ВС и координатами их центра тяжести. Точность расчетов соответствует точности при применении принципа суперпозиции и могут выполняться вручную, что было особенно актуально до развития и широкого применения ПЭВМ.
Метод Мора применим и для статически неопределимых задач (СНЗ), если отбросить «лишние» связи, заменив их неизвестными силами Xi - реакциями опор, которые определяются из условия отсутствия соответствующих перемещений. Метод получил название метод сил, а система линейных уравнений для определения Xi – канонической системой уравнений метода сил. Коэффициенты этой системы определяются методом Мора-Верещагина.
Таким образом, метод Мора-Верещагина позволяет заменить задачу интегрирования системы нелинейных дифференциальных уравнений совокупностью простых операций, которые можно выполнять вручную.
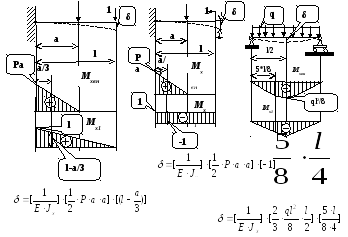
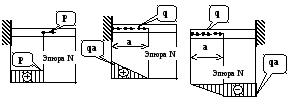
2.5.2 Эпюры ВС в статически определимых задачах
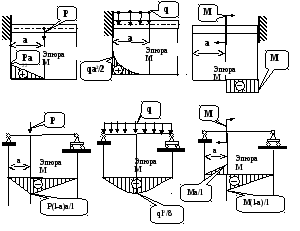
Актуально построение эпюр ВС для изгибающего момента М, крутящего момента Мк и продольной силы N. Перемещения от поперечных сил малы и ими обычно пренебрегают.Используя принцип суперпозиции всегда можно представить эпюры ВС от внешней нагрузки как совокупность ВС от отдельных нагрузок. Построение эпюр от отдельных нагрузок просто. Кроме того, обычно эпюры ВС для отдельных внешних нагрузок приводятся в справочниках конструктора.
Рассмотрим несколько типичных примеров.
а .
Растяжение-сжатие
.
Растяжение-сжатие
б. Кручение
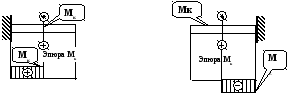
в.Изгиб
2.5.3 Интеграл Мора и его вычисление по способу Верещагина
В общем случае интеграл Мора
![]()
![]() ,
,
где
![]() - искомое перемещение в заданных точке
и направлении,
- искомое перемещение в заданных точке
и направлении,
![]() -
внутренние силы от внешних нагрузок,
-
внутренние силы от внешних нагрузок,
![]() -
внутренние силы от единичной силы,
приложенной в заданной точке и заданном
направлении.
-
внутренние силы от единичной силы,
приложенной в заданной точке и заданном
направлении.
В основе способа Верещагина лежит линейность обобщенной
внутренней
силы![]() от единичной нагрузки, т.е. всегда
от единичной нагрузки, т.е. всегда![]() ,
что после подстановки в интеграл Мора
дает
,
что после подстановки в интеграл Мора
дает
![]() ,
,
где обозначено:
![]() -
площадь эпюры ВС от внешних сил,
-
площадь эпюры ВС от внешних сил,
![]() -
значение внутренней силы
-
значение внутренней силы![]() от единичной приz
в центре тяжести площадь эпюры ВС от
внешних силЮ
от единичной приz
в центре тяжести площадь эпюры ВС от
внешних силЮ
Ж – соответствующая жесткость.
Итак, для вычисления перемещения в заданной точке стержня и в заданном направлении для стержня постоянного сечения (Ж=const), необходимо:
Приложить единичную силу в нужной точке и направлении,
Построить эпюры ВС от внешней нагрузки, определить ее площадь
![]() и
координату центра тяжести
и
координату центра тяжести
![]() ,
,
Построить эпюры ВС от единичной силы,
Вычислить перемещение как сумму произведений
 на
на и
1/Ж.
и
1/Ж.
Примеры вычисления перемещений по способу Верещагина: