

4.4.5. Измерительные цепи резистивных пип
Для измерения выходного параметра резистивных ПИП – электрического сопротивления R– может быть использована любая цепь, предназначенная для измерения сопротивления. Наибольшее распространение находят следующие измерительные цепи [15]: 1) цепь последовательного включения преобразователя и измерительного прибора; 2) цепь резистивного делителя напряжения; 3) цепь неравновесного моста; 4) цепь автоматически уравновешиваемого моста; 5) частотно-зависимые цепи генераторов гармонических и релаксационных колебаний.
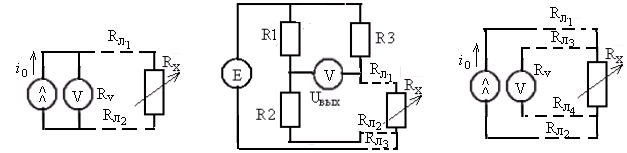
Цепь последовательного включения(рис. 4.16а) состоит из РИПRXи сопротивления нагрузкиRH(например, амперметра). Выходной величиной измерительной цепи является ток. В общем случае сопротивление резистивного ПИП является функцией измеряемой величины Х и может быть записано в видеRX=R0RX. Уравнение преобразования цепи будет
IX=E/[RН+R0RX]. (4.44)
Измерительная цепь последовательного включения характеризуется нелинейной зависимостью между IXиR(X). Погрешность линейности может быть уменьшена при работе на начальном участке характеристикиIX=F(R).
Цепь резистивного делителя напряжения показана на рис. 4.16б. Уравнение преобразования цепи имеет вид
 ,
(4.45)
,
(4.45)
где R1– сопротивление, ограничивающее ток в цепи.
В качестве нагрузки RН может быть использован вольтметр. Если сопротивление вольтметраRВ=RНRХ, получим
UВЫХ = E(R0 RX)/(R1+ R0 RХ). (4.46)
Измерительные цепи последовательного включения и резистивного делителя напряжения характеризуются нелинейной зависимостью между выходной величиной (IX,UX) и изменениемRХ. Погрешность линейности уменьшается при работе на начальном участке характеристики преобразования. Эта погрешность также может быть уменьшена при включении в цепь делителя напряжения дифференциального преобразователя (рис. 4.16в). Полагая, чтоRX1=R0/2 -RX;RX2=R0/2 +RX иRуRХ2, для цепи с дифференциальным преобразователем получим линейную зависимостьUВЫХотRX:
UВЫХ=E(R0 + 2RX)/2R0. (4.47)
Недостатком рассмотренных измерительных цепей является то, что нулевому значению измеряемой величины (Х = 0) соответствует ненулевое значение выходной величины (IX0;UВЫХ0). При измерении переменных величин этот недостаток устраняется использованием разделительных конденсаторов. Результирующие погрешности цепей последовательного включения и делителя напряжения зависят от погрешности преобразователя, погрешности от нестабильности параметров источника питания и нагрузки.
Рассмотренные измерительные цепи могут работать как на постоянном, так и на переменном токе.
Мостовые измерительные цепи выполняются в виде неравновесных и равновесных мостов. В неравновесных мостах (рис. 4.16г, д, е) в исходном состоянии осуществляется компенсация начального значения выходного сигнала так, чтобы при Х = 0 он был равен нулю. При отклонении измеряемой величины Х от нуля изменяется сопротивлениеRX=R0+RXи мост выходит из состояния равновесия.
Выходное напряжение мостовой цепи (рис. 4.16г) определяется как
 .
(4.48)
.
(4.48)
Резистивные датчики могут быть включены в одно (рис. 4.17а), два (рис. 4.16д) и четыре (рис. 4.16е) плеча моста. Как видно из формулы (4.48), выходное напряжение моста при заданном напряжении питания Е в общем случае нелинейно зависит отRXдля всех вариантов включения датчиков.

а б в

г д е ж
Рис. 4.16
При включении дифференциального преобразователя (рис. 4.16д), если начальные сопротивления RX1,RX2равныR0и равныR3,R4, т.е.RX1=RX2=R3 =R4 =R0 иRН>>R0, уравнение преобразования мостовой цепи будет линейным.
Выходное напряжение для равноплечего моста при RНR0может быть определено по формулами:UВЫХ1=ERX/4R0(рис. 4.16г);UВЫХ2 =ERX/2R0(рис. 4.16д);UВЫХ4=ERX/R0(рис. 4.16е), то есть выходное напряжение линейно зависит от изменения сопротивленияRX.
К достоинствам мостовой цепи можно отнести возможность получения нулевого выходного сигнала при значении измеряемой величины, равной нулю.
Мостовые цепи работают как на постоянном, так и на переменном токе, причем питание может осуществляться как от источника напряжения, так и от источника тока.
На рис. 4.16ж показана цепь автоматически уравновешиваемого моста. При отсутствии входного сигнала мост уравновешен и движок реохорда Rрнаходится в определенном начальном положении. При изменении входного сигнала мостовая цепь выходит из состояния равновесия. Сигнал разбаланса усиливается усилителем Ус и поступает на вход реверсивного двигателя РД. Двигатель приходит во вращение и перемещает движок реохордаRpдо тех пор, пока не наступает новое состояние равновесия в мостовой цепи. Шкала указателя на валу двигателя и реохорда градуируется в единицах входной величины.
Основными причинами погрешностей мостовых цепей являются: временная и температурная нестабильность нерабочих плеч моста; нестабильность источника питания; погрешности ИП.
При малых величинах сопротивлений резистивных преобразователей (единицы и десятки ом) появляется погрешность из-за изменения сопротивления соединительных проводов под действием температуры. Для уменьшения этой погрешности применяют многопроводные линии связи, когда к резистивному преобразователю подводится больше двух проводов. На рис. 4.17 показаны примеры двухпроводной (рис. 4.17а), трехпроводной (рис. 4.17б) и четырехпроводной (рис. 4.17в) линий связи.
а б в
Рис. 4.17
В схеме (рис. 4.17б) резистивный датчик Rх подключается к мостовой цепи так, чтобы два сопротивления соединительных линийRл1иRл2вошли в разные (соседние) плечи моста, а третье сопротивление линииRл3 оказалось включенным последовательно с источником питания Е. При работе измерительной цепи в равновесном режиме метод дает полную компенсацию погрешности от изменения сопротивления линии. При работе в неравновесном режиме эта погрешность существенно меньше, чем в двухпроводной линии.
Падение напряжения на резистивном ПИП Rх(рис. 4.17)U=RХi0измеряется вольтметром с большим входным сопротивлением (Rv >> Rх,Rл3,Rл4) . При этом подключение резистивного ПИП с помощью четырех проводов обеспечивает практически полную независимость показаний от сопротивления линии.
В настоящее время очень широкое применение находят измерительные цепи резистивных ИП, использующие операционные усилители. На рис. 4.18 приведены примеры схем преобразователей сопротивления в напряжение. Схема с двухпроводной линией связи (рис. 4.18а) применяется в тех случаях, когда измеряются большие сопротивления или когда резистивный ПИП находится в непосредственной близости от измерительной схемы. Для данной цепи выходное напряжение Uвых= -Е.R2/R1 [26]. Датчик может быть включен вместо любого из резисторов схемы.
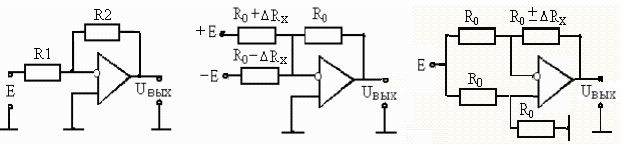
а б в
Рис. 4.18
Измерительная цепь, показанная на рис. 4.18б, может быть использована для дифференциальных резистивных датчиков. Выходное напряжение этой измерительной цепи может быть определено по формуле UВЫХ= 2Е.RХ/R0. На рис. 4.18в показана схема моста с ОУ. Уравнение преобразования измерительной цепи имеет видUВЫХ= -2RХ/(2R0) [27].