

5. Настройка регулятора на технический оптимум
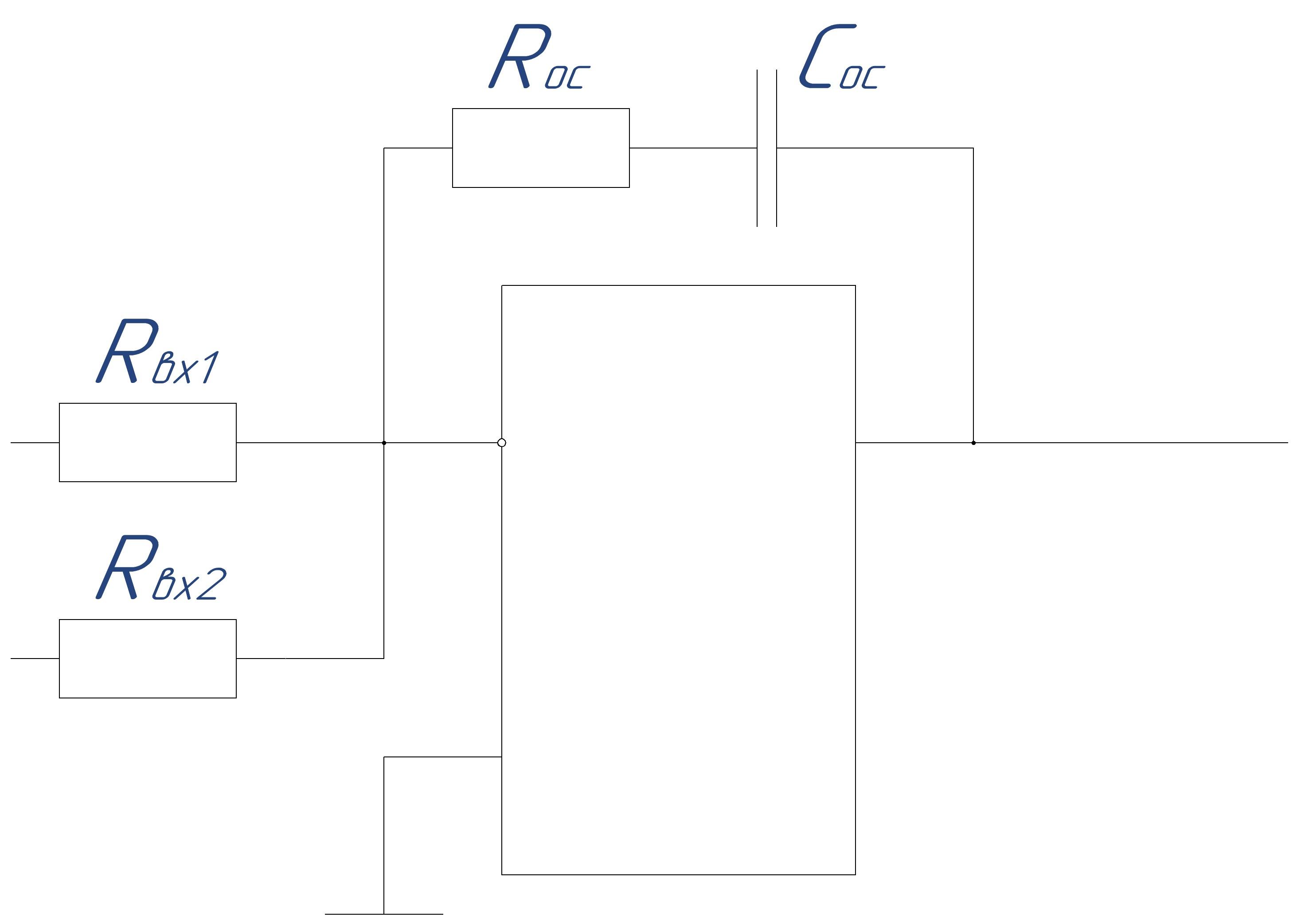
Рисунок 4 – ПИ-регулятор тока.
Передаточная функция Пи – регулятора тока реализованного на базе операционного усилителя имеет вид:
![]()
где:
![]()
![]() ,
тогда:
,
тогда:
![]()
![]()
![]()
![]()
![]() - коэффициент
передачи задержанной о.с. по току
- коэффициент
передачи задержанной о.с. по току
![]()
![]() Ом
Ом
Тогда:
![]()
Передаточная функция ПИ – регулятора тока для обеспечения условия технического оптимума в контуре регулирования тока имеет вид:
![]()
Приравняв
выражения
![]() и
и![]() получим выражения для нахождения
получим выражения для нахождения![]() и
и![]() :
:
![]()
![]()
![]()
![]()
6. Настройка регулятора скорости на симметричный оптимум

Рисунок 5 – Регулятор скорости.
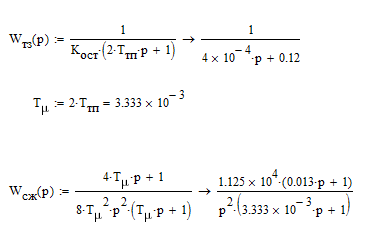
Контур тока в замкнутом состоянии можно приближённо представить апериодическим звеном с передаточной функцией:
![]()
Контур скорости, настроенный на симметричный оптимум в разомкнутом состоянии имеет передаточную функцию:
![]()
За
малую постоянную времени принимаем
![]() ,
тогда:
,
тогда:
![]()
7. Передаточная функция разомкнутого контура скорости
Для реализации требуемого регулятора тока необходимо подобрать настраиваемые элементы в цепях обратной связи и на входе усилителя, которые обеспечили бы получение желаемой передаточной функции. Задаёмся приблизительным значением:
![]()
![]()
![]()
![]()
![]()
Максимальное значение сигнала обратной связи по скорости:
![]()
![]()
Считаем,
что:
![]()
![]()
![]()
![]() - коэффициент
передачи обратной связи по скорости
- коэффициент
передачи обратной связи по скорости
![]()

![]()
Приравниваем желаемую передаточную функцию к действительной, тогда:
![]()
![]()
![]()
Передаточная функция ПИ – регулятора на базе операционного усилителя:
![]()
8. Переходный процесс в замкнутом контуре тока
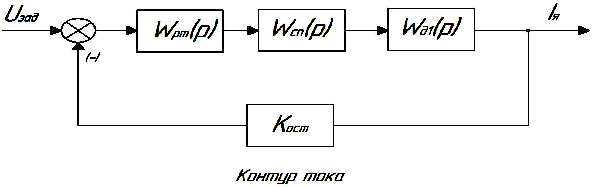
Рисунок 6 – Контур тока.
![]() - типовое воздействие
(единичный скачёк)
- типовое воздействие
(единичный скачёк)
![]()
![]()
![]()
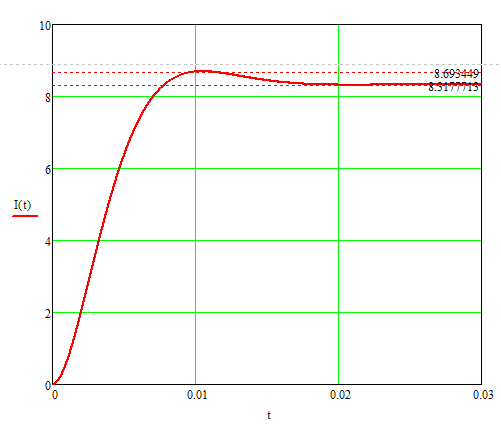
Рисунок 7 – Переходный процесс в контуре тока
Показатели качества токового контура:
Контур тока имеет достаточный запас устойчивости, так как перерегулирование в полученном контуре составляет
![]()
![]() ;
;![]()
![]()
9. Переходные процессы в замкнутом контуре скорости
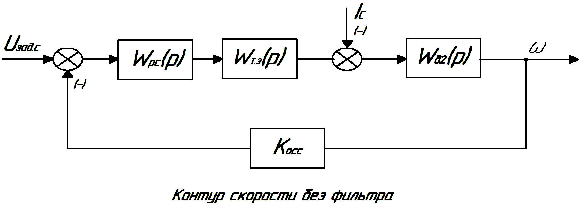
Рисунок 8 – Контур скорости
Без фильтра на входе системы передаточная функция замкнутого контура скорости имеет вид:
![]()
![]()
![]()
![]() - типовое воздействие
(единичный скачёк)
- типовое воздействие
(единичный скачёк)
![]()
![]()
![]() =1.88
=1.88
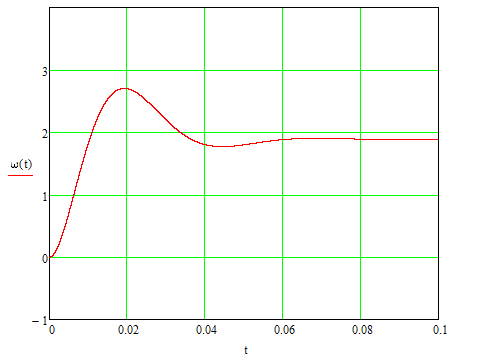
Рисунок 9 – Переходный процесс в контуре скорости без учета фильтра
Показатели качества управления контура скорости:
перерегулирование в контуре скорости составляет
![]()
![]()
Время
переходного процесса:
![]() с
с
Передаточная функция замкнутого контура скорости с учётом фильтра на входе САУ:
![]()
![]()
![]()
![]()
![]()
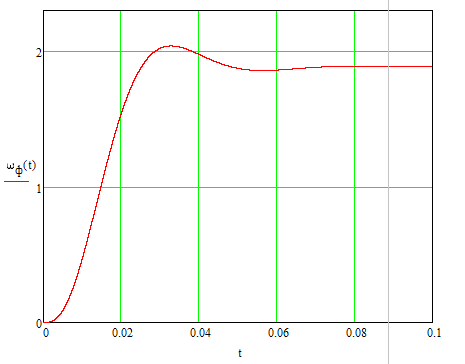
Рисунок 10 – Переходный процесс в контуре скорости с учетом фильтра
Показатели качества управления скоростного контура:
перерегулирование в контуре скорости составляет:
![]()
![]()
Время
переходного процесса:
![]()
![]()
10. Переходный процесс по возмущению
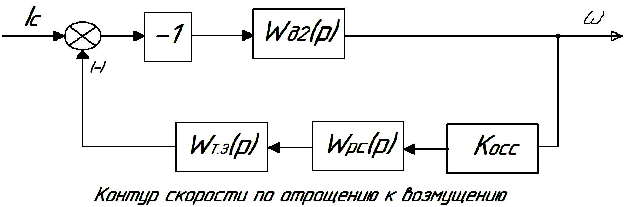
Рисунок 11 – Контур скорости по отношению к возмущению
Передаточная функция замкнутого контура скорости по отношению к возмущению:
![]() ,
или:
,
или:
![]()
![]()
![]()
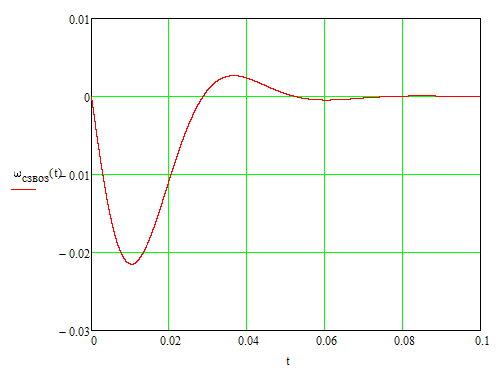
Рисунок 11 – Переходный процесс по возмущению
Показатели качества управления по возмущению:
время
переходного процесса
![]()
![]()
11. Описание электропривода Кемтор
Электропривод типа «Кемтор» производства НРБ предназначен для управления электроприводами главного движения токарных, фрезерных и других станков и представляет собой электропривод постоянного тока с двухзонным регулированием скорости. В первой зоне регулирование осуществляется при постоянстве момента М=const за счет подводимого к якорю двигателя напряжения при постоянном токе возбуждения, при нормальном значении напряжения якоря (Д=1:3,5) . В состав привода входят (рис.1): - преобразователь тиристорный для питания якоря обмотки возбуждения двигателя; - электродвигатель постоянного тока с независимым возбуждением и встроенными тахогенераторами и вентилятором. Конструктивно преобразователь выполнен по блочной структуре, позволяющей производить оперативнуб замену блоков и свободный доступ ко всем элементам и контрольным точкам.