

Леонтьев, Б.С. Расчет привода учебное пособие / Леонтьев, Б.С. Расчет привода учебное пособие в 2 частях. Часть 2
.pdfl1 = К2 +(δ1 )1 +(Т)1 , |
(7.8) |
где К2 – расстояние от плоскости симметрии червячной передачи до торцо-
вой поверхности прилива на корпусе для правого подшипникового узла
(см. раздел 6.2.2);
(δ1 )1 – толщина буртика стакана для упора подшипников правой опоры
(конструкцию стакана – см. там же); (Т)1 – параметр роликоподшипника правой опоры (там же).
Расстояние между опорами 1 и 2, мм: |
|
||||||||
l =l |
+ К |
2 |
+(δ |
1 |
) |
+ |
(B)'1 |
, |
(7.9) |
|
|||||||||
1 |
|
|
1 |
2 |
|
|
|||
|
(В)'1 |
|
|
|
|
|
|||
где |
– параметр шарикоподшипника левой опоры (см. раздел 6.2.2); |
||||||||
остальные параметры – см. выше.
Равновесие сил и моментов в вертикальной плоскости (YOZ ):
∑М |
1 |
= 0; F (l −l )+ F |
0,5 d |
1 |
− R |
2 В |
= 0 ; R |
= |
Fr (l −l1 )+ Fa1 0,5 d1 |
. |
|||||||||
|
|
|
|||||||||||||||||
|
r |
1 |
a1 |
|
|
|
|
|
2 В |
|
|
|
l |
||||||
∑М |
2 |
= 0; − F l + F |
0,5 d |
1 |
+ R |
l = 0 ; |
R |
В |
= |
Fr l1 − Fa1 0,5 d1 |
. |
||||||||
|
|||||||||||||||||||
|
|
r 1 |
a1 |
|
|
|
|
1 В |
|
|
1 |
|
|
l |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(7.10)
(7.11)
|
|
|
Примечание. Отрицательный знак реакции R1В означает, |
что |
||||||||||||
|
|
|
действительное направление вектора R1В противоположно пред- |
|||||||||||||
|
|
|
варительно заданному. В этом случае расчетную схему вала ме- |
|||||||||||||
|
|
|
нять не следует, а отрицательный знак учесть при определении |
|||||||||||||
|
|
|
суммарной нагрузки на подшипник опоры 1 в разделе 7.4. |
|
||||||||||||
Проверка: ∑Y = R1 В − Fr + R2 В = 0 . |
|
|
|
|
|
|
(7.12) |
|||||||||
Равновесие сил и моментов в горизонтальной плоскости ( XOZ ): |
||||||||||||||||
∑М |
1 |
= 0; |
|
F (l −l )−R |
l =0 ; |
|
R |
= F |
|
l −l1 |
. |
(7.13) |
||||
|
|
|
||||||||||||||
|
|
|
t |
|
1 |
2 Г |
|
|
|
2 Г |
t1 |
|
l |
|
||
∑М |
|
= 0; |
|
R |
l − F |
l |
= 0 ; |
|
R |
= F |
l1 . |
(7.14) |
||||
|
2 |
|
|
1 Г |
|
t1 |
1 |
|
|
|
1Г |
t1 |
|
l |
|
|
Проверка: ∑X = −R1 Г + Ft1 −R2 Г =0 . |
|
|
|
|
|
(7.15) |
||||||||||
Реакции опор от сил в зацеплении: |
|
|
|
|
|
|
|
|||||||||
|
R = |
R2 |
+ R2 |
|
; R = |
R2 |
+ R2 |
. |
|
|
|
|
|
(7.16) |
||
|
|
1 |
1В |
1Г |
2 |
|
2 В |
2 Г |
|
|
|
|
|
|
|
|
Суммарные реакции опор см. в разделе 7.4.
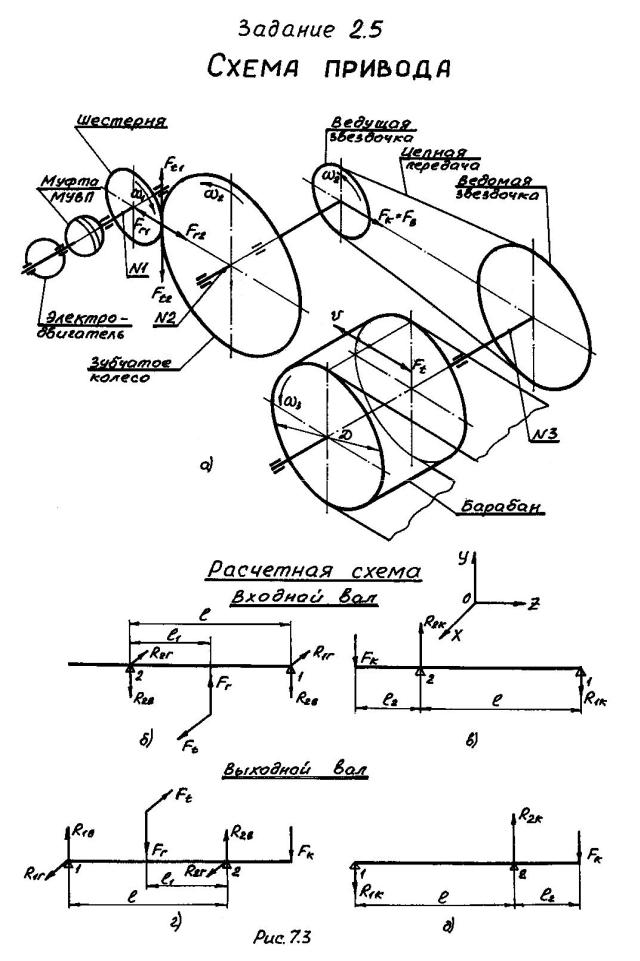
7.2.3. Расчетная схема для задания 2.5 выполнена на основании схемы привода по рис. 7.3, a и должна соответствовать схеме на рис. 7.3, б.
По конструктивной схеме №1 цилиндрического зубчатого редуктора определяем плечи сил для расчетной схемы входного вала, при этом считаем, что ре-
акции опор проходят по оси симметрии шарикоподшипников. |
|
Расстояние между опорами 1 и 2, мм: |
|
l = (В)1 +2Ум1 +2А1 +b1 . |
(7.17) |
Расшифровку параметров – см. раздел 7.2.1. l1 = 0,5l .
31

Равновесие сил и моментов в вертикальной плоскости (YOZ ):
∑М |
1 |
= 0; |
F |
(l −l )− R |
|
l = 0; |
|
R |
|
|
= F |
l −l1 |
. |
(7.18) |
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
r |
|
1 |
|
2 В |
|
|
|
|
2 В |
|
|
r |
l |
|
|||||||||
∑М |
|
= 0; |
−F l + R |
l = 0 ; |
|
|
R |
|
|
|
= F |
l1 |
. |
(7.19) |
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
2 |
|
|
r |
1 |
|
1 В |
|
|
|
|
|
1 |
|
Вер |
|
|
r |
l |
|
|||||
Проверка: ∑Y = −R1 В + Fr |
− R2 В = 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.20) |
|||||||||||
Равновесие сил и моментов в горизонтальной плоскости ( XOZ ): |
|
|||||||||||||||||||||||||
∑М |
1 |
= 0; |
− F (l −l1)+ R |
2 Г |
l = 0 ; |
|
R |
= F |
l −l1 |
. |
(7.21) |
|||||||||||||||
|
|
|||||||||||||||||||||||||
|
|
t |
|
|
|
|
|
|
|
|
2 Г |
|
|
|
t |
|
l |
|
|
|
|
|
||||
∑М |
|
|
= 0; |
F l −R |
l = 0 ; |
|
|
|
R |
|
= F l1 . |
(7.22) |
||||||||||||||
|
2 |
|
t |
1 |
1Г |
|
|
|
|
|
|
|
1Г |
|
|
t |
|
l |
|
|
|
|
|
|||
Проверка: ∑X= −R1 Г + Ft − R2 Г = 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(7.23) |
|||||||||||
Реакции опор от сил в зацеплении: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
R = |
R2 + R2 |
; R = |
|
R |
2 |
+ R |
2 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
(7.24) |
|||
|
|
|
1 |
1В |
1 Г |
2 |
|
|
2 В |
|
2 Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Суммарные реакции опор см. в разделе 7.4.
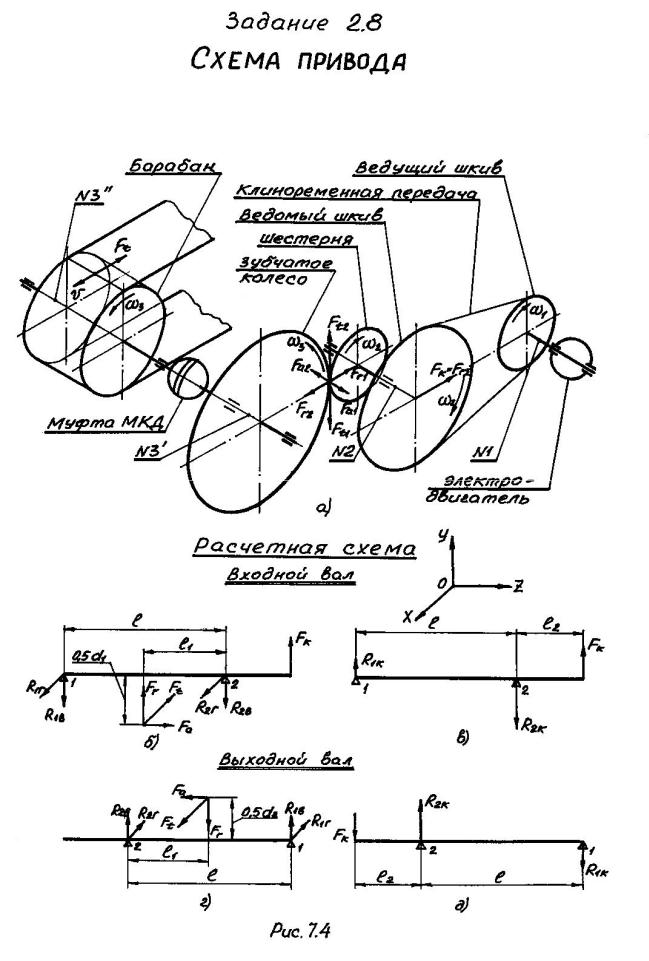
7.2.4. Расчетная схема для задания 2.8 выполнена на основании схемы привода по рис. 7.4, a и должна соответствовать схеме на рис. 7.4, б.
По конструктивной схеме №1 цилиндрического зубчатого редуктора с косозубыми колесами определяем плечи сил для расчетной схемы входного вала. В опорах 1 и 2 установлены радиально-упорные шарикоподшипники по схеме «враспор», поэтому точки приложения опорных реакций смещены от наружных торцов подшипников на величину a внутрь схемы.
Расстояние между опорами 1 и 2, мм: |
|
l = 2(В)1 +2Ум +2А1 +b1 −2a , |
(7.25) |
где (В)1 – ширина кольца подшипника на входном валу (см. раздел 6.1.2); |
|
Ум – ширина мазеудерживающего кольца (см. раздел 6.4, примечание к
lвт1 );
А1 – торцовый зазор (см. раздел 6.1.1);
b1 – ширина зубчатого венца шестерни (там же);
a – смещение точки приложения опорной реакции от торца радиальноупорного шарикоподшипника (см. 1, рис. 7.1), мм:
а =0,5[(В)1 +0,5(d + Д)1 tgα], |
(7.26) |
где (d + Д)1 – сумма значений внутреннего и наружного диаметров подшипника входного вала (см. раздел 6.1.2);
α – угол контакта радиально-упорного шарикоподшипника (там же).
Примечание. Значение а округляем в меньшую сторону до целого числа или величины кратной 0,5 мм. Например:
1)а= 0,5 [16 +0,5(30 +62)tg26o]=19,22 ; принимаем а=19 мм;
2)а = 0,5 [22 + 0,5(60 +110)tg26o]= 31,73; принимаем а =31,5
мм.
l1 – расстояние между опорой 2 (ближней к законцовке вала) и точкой приложения сил в зацеплении (посредине зубчатого венца шестерни):
32
l1 = 0,5l – для симметричного расположения опор относительно точки
приложения сил.
Равновесие сил и моментов в вертикальной плоскости (YOZ ):
∑М1 = 0; − Fr (l −l1 )− Fa 0,5 d1 + R2 В l = 0 ;
R2 В = Fr (l −l1 )+lFa 0,5 d1 .
∑М2 = 0; |
Fr l1 + Fa 0,5 d1 − R1 В l = 0 ; |
|
R |
|
= Fr l1 − Fa 0,5 d1 . |
1В |
l |
|
|
|
|
Примечание. Отрицательный знак реакции R1В означает, что действительное направление вектора R1В противоположно предва-
рительно заданному. В этом случае расчетную схему вала менять не следует, а отрицательный знак учесть при определении суммарной нагрузки на подшипник опоры 1 в разделе 7.4.
Проверка: ∑Y = −R1 В + Fr − R2 В = 0 .
Равновесие сил и моментов в горизонтальной плоскости ( XOZ ):
∑М |
1 |
= 0; |
− F (l −l1)+ R |
2 Г |
l = 0 R |
= F |
l −l1 |
. |
|||
|
|||||||||||
|
|
|
t |
|
|
2 Г |
t |
l |
|||
|
|
|
|
|
|
|
|
= F l1 . |
|||
∑М |
|
= 0; |
F l − R |
l = 0 |
R |
|
|
||||
|
|
2 |
|
t 1 1 Г |
|
|
1 Г |
t |
l |
|
|
Проверка: ∑X = R1 Г − Ft |
+ R2 Г = 0 . |
|
|
|
|||||||
Суммарные реакции опор см. в разделе 7.4.
(7.27)
(7.28)
(7.29)
(7.30)
(7.31)
(7.32)
33
34
35
36
37
7.3.Радиальные реакции опор от действия силы на консольной законцовке вала
7.3.1 Плечо радиальной консольной силы Fк
а) При установке на входном валу соединительной муфты МУВП (см. рис.
7.2, a для задания 2.3 и рис. 7.3, |
a для задания 2.5) плечо l2 |
консольной силы |
|||||||
Fк определяется как расстояние от опоры 2 до конца консольной законцовки вала: |
|||||||||
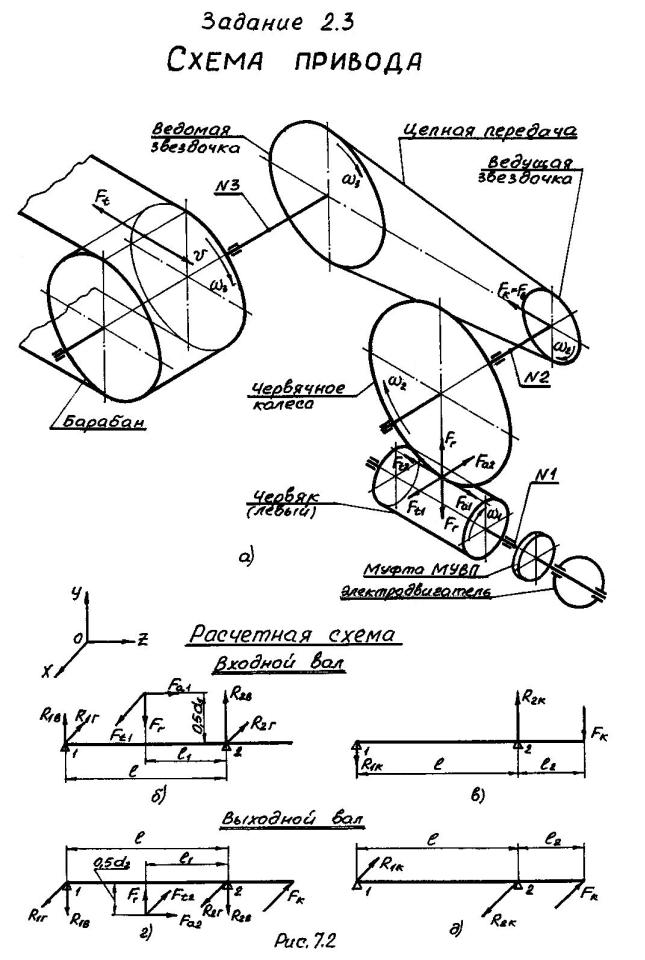
• для задания 2.3 по конструктивной схеме № 3, мм: |
|
||||||||
l2 |
= |
(T )1 +lвт +(H )1 +(8...12)+(l)1 , |
(7.33) |
||||||
где (T )1 – параметр роликоподшипника правой опоры вала (см. раздел 6.2.2); |
|||||||||
|
|
|
|
lвт – длина распорной втулки между подшипником и крышкой подшип- |
|||||
|
|
|
|
никового узла: |
|
|
|||
|
|
|
|
|
lвт |
= 10 мм для dрез |
≤ М45×1,5; lвт = 12 мм для dрез ≥ М48×1,5 |
||
|
|
|
|
|
( dрез – см. раздел 6.2.2); |
|
|||
|
|
|
|
(H )1 – высота крышки подшипникового узла поз.1 (см. раздел 6.3); |
|||||
|
|
|
|
(8...12) мм – конструктивный размер выхода участка вала диаметром |
|||||
|
|
|
|
dман за пределы крышки подшипникового узла. Рекомендуется прини- |
|||||
|
|
|
|
мать таким, чтобы значение l2 получилось целым числом; |
|||||
|
|
|
|
(l)1 – полная длина законцовки входного вала (см. раздел 6.2.2 параметр l |
|||||
|
|
|
|
|
рис. 6.1, а или 6.2); |
|
|
||
• для задания 2.5 по конструктивной схеме № 1, мм: |
|
||||||||
l |
2 |
= |
|
(В)1 |
+l |
вт1 |
+(H ) +(8...12)+(l) , |
(7.34) |
|
|
|
||||||||
|
|
|
|
|
1 |
1 |
|
||
2
где (В)1 – ширина кольца радиального однорядного шарикоподшипника (см. раз-
дел 6.1.2);
lвт1 – длина распорной втулки между подшипником и крышкой подшип-
никового узла (см. раздел 6.4, а);
(H )1 , (8...12)мм – расшифровку параметров – см. выше, 7.3.1, а;
(l)1 – полная длина законцовки входного вала (см. раздел 6.1.2 параметр
l рис. 6.1, а или 6.2);
б) При установке на входном валу ведомого шкива клиноременной передачи плечо l2 консольной силы Fк определяется как расстояние от опоры 2 до середи-
ны консольной законцовки вала:
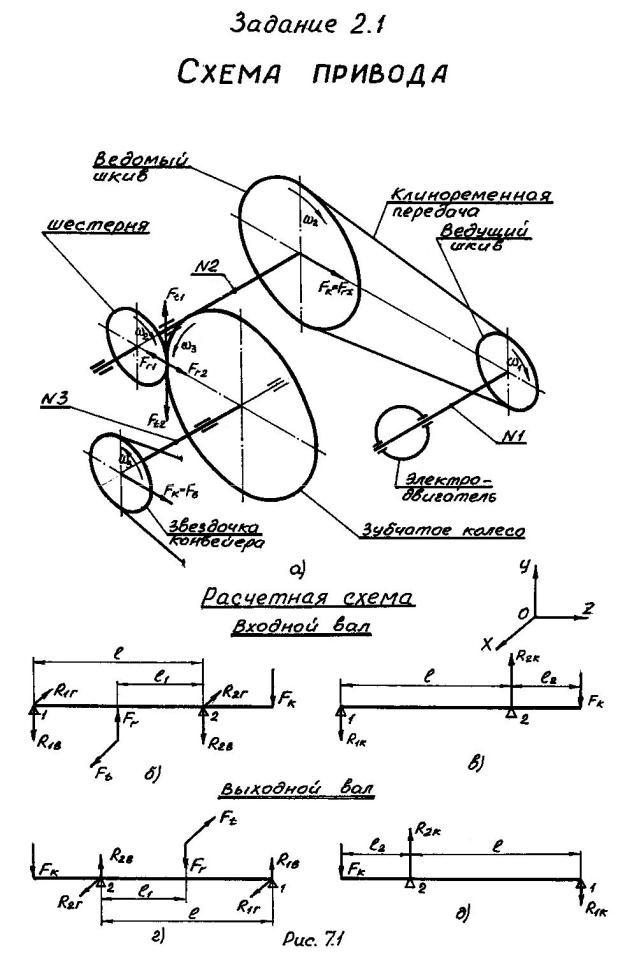
• для задания 2.1 по конструктивной схеме №1, мм: |
|
||||||||||||
l |
2 |
= |
(В)1 |
|
+l |
вт1 |
+(H ) +(8...12)+ |
(l)1 |
|
(7.35) |
|||
|
2 |
||||||||||||
|
2 |
|
|
|
1 |
|
|
|
|||||
(расшифровку параметров – см. выше, для задания 2.5); |
|
||||||||||||
• для задания 2.8 по конструктивной схеме №1, мм: |
|
||||||||||||
l |
2 |
= a +l |
вт1 |
+(H ) |
+(8...12)+ |
(l)1 |
|
, |
|
(7.36) |
|||
|
|
|
|||||||||||
|
|
|
|
|
1 |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||
38

где a – смещение точки приложения опорной реакции от торца радиальноупорного шарикоподшипника (см. раздел 7.2.4).
Расшифровку остальных параметров – см. выше, 7.3.1, а.
7.3.2 Определение радиальной консольной силы Fк
а) При установке на входном валу соединительной муфты МУВП (для зада-
ний 2.3 и 2.5), Н: |
|
|
|
|
|
||||
F =C |
р |
∆; |
C |
р |
= 610 3 Т |
н |
, |
(7.37) |
|
к |
|
|
|
|
|
|
|||
где Тн |
и ∆– номинальный крутящий момент муфты и допускаемое радиальное |
||||||||
смещение валов по таблице 6.1 в зависимости от диаметра d1 |
вала электродвига- |
||||||||
теля (см. раздел 1.1, глава 1, часть 1). |
|
||||||||
Значение Fк округляем в большую сторону до целого числа.
б) При установке на входном валу ведомого шкива клиноременной передачи
(для заданий 2.1 и 2.8), Н: |
|
Fк = Fr ∑ (см. раздел 5.8, глава 5, часть 1). |
(7.38) |
7.3.3 Реакции опор от силы Fк
а) При установке на входном валу муфты МУВП: расчетная схема по рис. 7.2, в для задания 2.3 и по рис. 7.3, в для задания 2.5.
Реакции от силы Fк:
∑М |
1 |
= 0; |
F |
(l +l2 )− R |
l ; R |
= F |
l +l2 |
; |
(7.39) |
||||||
|
|
|
|||||||||||||
|
|
к |
|
|
|
|
2к |
2к |
к |
|
l |
|
|
||
∑М |
|
= 0; |
F |
|
l |
|
− R |
l ; |
R |
= F |
l2 |
. |
|
(7.40) |
|
|
|
|
|
|
|||||||||||
|
2 |
|
к |
|
2 |
1к |
|
1к |
к |
|
l |
|
|
||
Проверка: − Fк + R2к − R1к = 0 . |
|
|
|
|
|
(7.41) |
|||||||||
В дальнейших расчетах направления векторов реакций опор от действия консольной силы условно принимаем совпадающими с направлениями векторов реакций от сил в зацеплении.
б) При установке на входном валу ведомого шкива клиноременной передачи: расчетная схема по рис. 7.1, в для задания 2.1 и по рис. 7.4, в для задания 2.8:
• для задания 2.1 направление консольной силы |
Fк противоположно на- |
|||||||||||||
правлению радиальной силы на шестерне Fr . |
|
|
|
|
|
|||||||||
Реакции от силы Fк: |
|
|
|
l +l2 |
|
|
||||||||
∑М = 0; |
F (l +l2 )− R |
l = 0 ; R |
= F |
; |
(7.42) |
|||||||||
|
|
|
||||||||||||
1 |
|
к |
|
|
2к |
2к |
к |
|
l |
|
|
|||
∑М |
|
= 0; |
F l |
|
− R |
l ; |
R |
= F |
l2 |
. |
|
(7.43) |
||
|
|
|
|
|||||||||||
|
2 |
|
к |
2 |
1к |
|
1к |
к |
|
l |
|
|
||
Проверка: − Fк + R2к − R1к = 0 . |
|
|
|
|
|
(7.44) |
||||||||
• для задания 2.8 направление консольной силы Fк совпадает с направлением радиальной силы на шестерне Fr .
Реакции от силы Fк:
39
∑М |
1 |
= 0; |
− F (l +l2 )+ R |
l = 0 ; |
|
R |
= F |
l +l2 |
; |
(7.45) |
|||||||||
|
|
||||||||||||||||||
|
|
|
к |
|
|
2к |
|
|
|
2к |
|
к |
l |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
||
∑М |
|
= 0; |
− F l |
|
+ R |
l = 0; |
R |
|
= F |
. |
|
|
(7.46) |
||||||
|
|
|
|
|
|
||||||||||||||
|
|
2 |
|
|
к |
2 |
1к |
|
|
1к |
|
к |
l |
|
|
|
|||
Проверка: Fк − R2к + R1к = 0 . |
|
|
|
|
|
|
|
|
|
|
(7.47) |
||||||||
7.4. Реакции опор для расчета подшипников: |
|
|
|
||||||||||||||||
Суммарные реакции опор: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
• для задания 2.1: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Fr1max |
= |
(− R1В − R1к )2 +(− R1 Г )2 ; Fr 2 max |
= |
(− R2 В + R2к )2 +(− R2 Г )2 ; |
(7.48) |
||||||||||||||
внешняя осевая сила FАmax =0 ; |
|
|
|
|
|
|
|
|
|
|
|||||||||
• для задания 2.3: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Fr1max = R1 + R1к ; Fr2max = R2 + R2к ; внешняя осевая сила FA max = Fa1 ; |
(7.49) |
||||||||||||||||||
• для задания 2.5: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Fr1max = R1 + R1к ; Fr2max = R2 + R2к ; внешняя осевая сила FAmax =0 ; |
(7.50) |
||||||||||||||||||
• для задания 2.8: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Fr1max |
= |
(− R1 В + R1к)2 + R12Г ; Fr 2 max = |
(− R2 В − R2к)2 + R22Г ; |
(7.51) |
|||||||||||||||
внешняя осевая сила FA max = Fa . |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
Примечание. |
Силы Fa1 для червячной передачи и Fa для косо- |
|
|||||||||||||
|
|
|
|
зубой зубчатой передачи см. в разделе 7.1. |
|
|
|
||||||||||||
7.5. Эквивалентные нагрузки на подшипники: |
|
||||||||||||||||||
Fr1 = KE Fr1max ; Fr2 = KE Fr2max ; |
|
|
|
|
|
|
|
|
|
(7.52) |
|||||||||
FA = KE FA max |
(для заданий 2.3 и 2.8); |
|
|
|
|
|
|
|
|
|
|||||||||
FA = 0 (для заданий 2.1 и 2.5), где |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
KE = 0,63 – коэффициент эквивалентности для типового режима нагру- |
|||||||||||||||||
|
|
жения II (см. 1, стр. 116 [118]). |
|
|
|
|
|
|
|
|
|
|
|||||||
Для задания 2.3 по конструктивной схеме №3 в опоре 1 установлен радиальный однорядный шарикоподшипник, который не воспринимает осевую нагрузку. Фиксирующей опорой вала является опора 2, в которой установлено два симметрично расположенных конических роликоподшипника. Так как при сборке узла подшипники специально не подбирают и не подгоняют, а при необходимости они могут быть заменены независимо друг от друга, то можно предположить, что только один подшипник будет воспринимать всю нагрузку, приходящуюся на опору. Принимаем Fa1 = 0, Fa2 = FA .
Для задания 2.8 по конструктивной схеме №1 применены радиальноупорные шарикоподшипники, которые установлены по схеме «враспор», при этом внешняя осевая нагрузка направлена в сторону опоры 2. Поэтому
Fa1 = 0, Fa2 = FA .
40