

Оператор проекции спина на произвольное направление
Получим оператор
проекции спина
![]() на единичный вектор n,
заданный в сферических координатах.
Найдем собственные функции и собственные
значения оператора
на единичный вектор n,
заданный в сферических координатах.
Найдем собственные функции и собственные
значения оператора
![]() .
.
Оператор проекции
спина. Вектор
n
единичной длины, заданный на
сфере Блоха
углами
![]() ,
имеет декартовые проекции
,
имеет декартовые проекции
![]() ,
,
![]() ,
,![]() ,
,
удовлетворяющие
![]() .
.
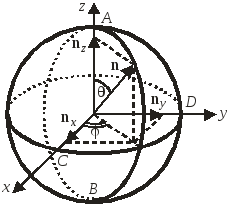
Сфера Блоха
Оператор спина ![]() проектируем на направление n
проектируем на направление n
![]() .
(П.11.6а)
.
(П.11.6а)
Подставляем
 ,
,
 ,
, ,
,
и находим оператор проекции спина на направление, заданное углами θ и φ:
 .
(П.11.6)
.
(П.11.6)
С учетом (7.11) в виде
![]() ,
,
![]() ,
,![]() ,
,
из
![]()
получаем
![]() .
(П.11.6б)
.
(П.11.6б)
Собственная функция

оператора
![]() удовлетворяет
удовлетворяет
![]() ,
(П.11.6в)
,
(П.11.6в)
где
![]() – собственное значение. Подстановка
– собственное значение. Подстановка![]() и
и![]() из (П.11.6) даетсистему
однородных алгебраических уравнений
из (П.11.6) даетсистему
однородных алгебраических уравнений
 .
.
Ищем
![]() ,
,![]() и
и![]() .Условие
совместности
.Условие
совместности

дает
 ,
,
![]() .
.
Проекция спина
на любое направление
![]() .
Этот парадоксальный результат следует
из того, что соседние проекции отличаются
на
.
Этот парадоксальный результат следует
из того, что соседние проекции отличаются
на
![]() и не могут превышать
и не могут превышать![]() ,
поскольку спин равен
,
поскольку спин равен![]() .
В первое уравнение системы с собственным
значением
.
В первое уравнение системы с собственным
значением![]()
![]()
подставляем
![]() ,
,
![]() ,
,
получаем
![]() .
.
Находим решение
![]() ,
,
![]() ,
,
 .
.
Нормировка
![]() ,
,
дает
![]() .
Тогда с точностью до постоянной фазы
собственная функция оператора проекции
спина с собственным значением
.
Тогда с точностью до постоянной фазы
собственная функция оператора проекции
спина с собственным значением![]() равна
равна
 .
(П.11.7)
.
(П.11.7)
Для перехода к
собственному значению
![]() разворачиваем вектор
разворачиваем вектор![]() ,
при этом
,
при этом
![]() ,
,
![]() .
.
Из (П.11.7) получаем
 .
(П.11.8)
.
(П.11.8)
Полученные состояния нормированы и ортогональны
![]() ,
,
![]() .
.
Состояния
![]() и
и![]() находятся в противоположных точках
сферы Блоха
и образуют
полный ортонормированный базис.
Произвольное спиновое состояние
разлагается по этому базису
находятся в противоположных точках
сферы Блоха
и образуют
полный ортонормированный базис.
Произвольное спиновое состояние
разлагается по этому базису
![]() .
.
Оператор
проектирования спина.
Для функций
![]() с собственными значениями
с собственными значениями![]() с учетом (П.11.6а) и (П.11.6в)
с учетом (П.11.6а) и (П.11.6в)
![]() ,
,
![]()
выполняется
![]() .
(П.11.8а)
.
(П.11.8а)
Определяем
операторы
проектирования спина на направления
![]() в виде
в виде
![]() .
(П.11.8б)
.
(П.11.8б)
С учетом (П.11.8а) выполняется
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Для произвольной функции состояния спина
![]()
выполняется
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
(П.11.8в)
,
(П.11.8в)
где
![]() Действие оператора проектирования
физически реализует анализатор
Штерна–Герлаха, показанный на рис. 1.
Произвольное спинорное состояние
Действие оператора проектирования
физически реализует анализатор
Штерна–Герлаха, показанный на рис. 1.
Произвольное спинорное состояние![]() проектируется на направления
проектируется на направления![]() .
Вероятность соответствующего результата
.
Вероятность соответствующего результата![]() .
После измерения состояния
.
После измерения состояния![]() пространственно разделены.
пространственно разделены.
Частные случаи направлений. Оператор проекции спина (П.11.6)


для вектора n,
направленного по оси z,
когда
![]() ,
,![]() ,
получает вид
,
получает вид
 .
.
Из (П.11.7) и (П.11.8)
 ,
,
 ,
,
находим собственные функции
 ,
,
 ,
,
совпадающие с (7.16).
Для вектора n,
направленного по оси x,
когда
![]() ,
,![]() ,
дает
,
дает
 .
.
Из (П.11.7) и (П.11.8) находим
 ,
,
 ,
,
![]() ,
,
![]() .(П.11.9)
.(П.11.9)
Для вектора n,
направленного по оси y,
когда
![]() ,
,![]() ,
имеем
,
имеем
 .
.
Из (П.11.7) и (П.11.8) получаем
 ,
,
 ,
,
![]() ,
,
![]() .(П.11.10)
.(П.11.10)
Из (П.11.10) следует, что если в анализаторе Штерна–Герлаха с осью вдоль оси z выходящий пучок
![]()
направить в аналогичный анализатор с осью вдоль оси y, то из него вновь выйдут два пучка, идущие по разным направлениям.