

7.10. Особенности работы дпт при питании выпрямителя
Для математической модели характерны следующие уравнения:
![]()
![]() .
.
Здесь
Ra,La– якорь,Rc,Lc- сериесная обмотка. ПотокФ(i)=Фш+Фс(i).
Введя систему относительных единиц![]() ,
,![]() ,
,![]() ,
и коэффициенты
,
и коэффициенты![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
, получим
получим
(Jбаз– запас МП …,- относительные потери).
Математическая модель ДПТ в установившемся режиме при постоянном токе имеет вид:
 или
или
Такое аналитическое выражение механических характеристик ДПТ при импульсном питании получить невозможно. Приближенное выражение можно получить при пренебрежении пульсациями частоты вращения, т.е. считая, что частота вращения равна своему среднему значению и момент инерции j=const.
Необходимо учитывать, что в квазиустановившемся режиме импульсного питания ср=нг. Система в квазиустановившемся режиме принимает вид:
Откуда следует
 .
.
Коэффициент формы тока Кфопределяется на основании решения уравнения Кирхгофа для мгновенных значений тока в интервалах периода коммутации при=ср. Это уравнение может быть записано в виде
![]() ,
,
где L*- относительная индуктивность цепи якоря.
Из этого следует вывод, что относительная электромагнитная постоянная ДПТ является функцией среднего значения частоты вращения
 .
.
Заметим,
что для ДНВ (К=0)![]() .
.
Проведем анализ уравнения механического равновесия ДПТ при питании от полупроводникового преобразователя.
![]() .
.
Заменим
![]() .
Имеем:
.
Имеем:
![]() .
.
Полные тепловые потери в ДПТ состоят из потерь в ярме и потерь в последовательной обмотке возбуждения
![]() ,
,
где
![]() .
.
Следовательно:
![]() .
.
При К=0 первая составляющая равна нулю, т.е. первый член представляет «сериесную» составляющую.
Следует важный вывод: сериесная составляющая срДПТ не зависит от пульсаций тока и определяется только потерями в двигателе.
«Независимая» составляющая при фиксированном уровне тепловых потерь уменьшается с ростом коэффициента формы тока.
7.11. Энергодинамические характеристики силовой части приводов постоянного тока
О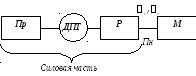 пределяющими
энергетическими и динамическими
характеристиками являются:
пределяющими
энергетическими и динамическими
характеристиками являются:
Мн– основная силовая характеристика (номинальный момент на выходном валу);
 - номинальная добротность (собственное
номинальное ускорение привода) –
основная динамическая характеристика,
гдеJпр–
момент инерции относительно оси
выходного вала;
- номинальная добротность (собственное
номинальное ускорение привода) –
основная динамическая характеристика,
гдеJпр–
момент инерции относительно оси
выходного вала;Пн=Мнн(номинальная приемистость) – обобщенная энергодинамическая характеристика.
Анализ потоков энергии в ЭМС типа импульсный преобразователь-двигатель-редуктор, в основу которого положены удельные показатели: относительная масса, относительное ускорение (добротность), приемистость:
 ,
,
 ,
,
 ,
,
где
![]() ,
,![]() ,
,![]() - удельные массы,
- удельные массы,
j– передаточное число редуктора;
J– моменты инерции;
т– массы;
Кф– коэффициент формы тока;
![]() - степень компаундирования, дает
возможность получить для ЭМС
- степень компаундирования, дает
возможность получить для ЭМС
На технические характеристики существенное влияние оказывают параметры, характеризующие уровень согласования элементов ЭМС (j,K,Кф). Определение их рациональных значений представляет собой многокритериальную задачу, которая обычно решается способом последовательного достижения частных целей (т.е. выделяются отдельные звенья, например, Пр-ДПТ, ДПТ-редуктор и т.д.).