

7.4. Рациональное распределение передаточных чисел
Тенденция современных ЭМС связана с использованием безредукторных систем, однако еще немало ЭМС, в которых применение редуктора вполне обосновано.
Как правило, механическая часть ЭМС имеет жесткие кинематические звенья и поэтому упрощенная модель системы включает ЭД – электродвигатель, ПУ – передаточное устройство и РМ – исполнительный механизм, рабочая машина.
Д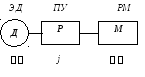 ля
получения возможности расчетов следует
привести моменты, сопротивление,
инерционные массы и т.д. к одной оси,
т.е. заменить реальную систему моделью,
в которой движущие моменты, моменты
сопротивления и инерционные массы
пересчитан так, чтобы сохранились
кинематические и динамические свойства
системы.
ля
получения возможности расчетов следует
привести моменты, сопротивление,
инерционные массы и т.д. к одной оси,
т.е. заменить реальную систему моделью,
в которой движущие моменты, моменты
сопротивления и инерционные массы
пересчитан так, чтобы сохранились
кинематические и динамические свойства
системы.
Приведение моментов:
Равенство мощностей на валах Д-РМ
![]() ,
,
где с– статический момент, приведенный к валу двигателя,
рм– статический момент механизма;
дирм– угловые скорости Д и РМ.
![]() ,
,
где j – передаточное число.
Если имеется несколько передач, то
![]() .
.
Поэтому используют приведение инерционных масс.
Моменты инерции относительно оси от расположения центра масс и могут быть определены
![]() ,
,
где ri – наименьшее расстояние от центра тяжести массытi до оси вращения.
В практических расчетах пользуются понятием радиуса инерции Rи
![]() или
или![]() .
.
Инерции простейших тел приводятся в справочниках.
Из равенства кинетической энергии
![]() ,
,
где Jпр– момент инерции системы, приведенный к валу двигателя,
Jд,J1…Jk,Jрм– моменты инерции самого двигателя, передаточного устройства и РМ,
д,1…k,рм– скорости Д-ПУ-РМ.
Отсюда
![]() ,
,
где J1…J2,Jт– передаточные числа между осями двигателя, от элементов ПУ и РМ.
В практике пользуются
![]() ,
,
где =1,11,3 – учитывает моменты инерции ПУ или
![]() .
.
Практические расчеты:
К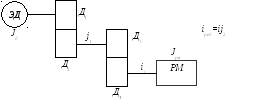 олеса
можно считать сплошными цилиндрами с
одинаковой шириной, изготовленными из
одинакового материала. Момент инерции
цилиндра
олеса
можно считать сплошными цилиндрами с
одинаковой шириной, изготовленными из
одинакового материала. Момент инерции
цилиндра![]() .
При- плотность,V– объем получим
.
При- плотность,V– объем получим
![]() ,
,
Допустим, что jp=40. При При этом максимальное передаточное число одной пары колес не превышает 10 (статическая величина для зубчатых передач). Редукцияjp=40 может, например, достигаться рядомj1иj2:
|
j1 |
4 |
5 |
6 |
7 |
8 |
10 |
|
j2 |
10 |
8 |
6.6 |
5.7 |
5 |
4 |
При этом последним членом можно пренебречь
 .
.
Так
как
![]() ,
то обычно
,
то обычно![]() и
и![]() .
Приj1=2
.
Приj1=2![]() и, следовательно, можно вычислить
и, следовательно, можно вычислить![]() .
Существует всегда стремлениеJредminилиj1min,
т.е. выбор за соотношениемj1=4,
аj2=10.
.
Существует всегда стремлениеJредminилиj1min,
т.е. выбор за соотношениемj1=4,
аj2=10.
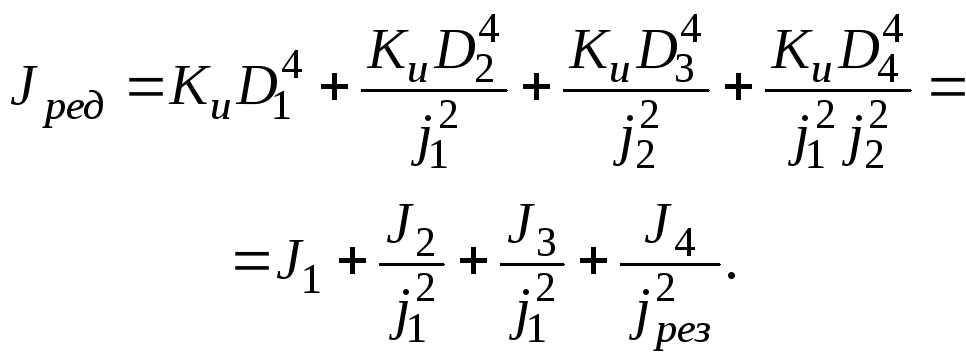
Как видим, момент инерции редуктора Jред, приведенный к валу Д приj40 зависит от первых двух пар. Поэтому в редукторах, используемых в ЭМС,
j1<j2<j3<…<in.
7.5. Оценка передаточного числа редуктора по быстродействию
Обычно используют типовой график движения:
м
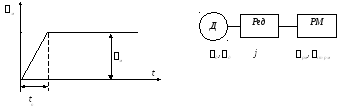 -
установившаяся частота вращения РМ,
-
установившаяся частота вращения РМ,![]() ,д
и ст
рм - const.
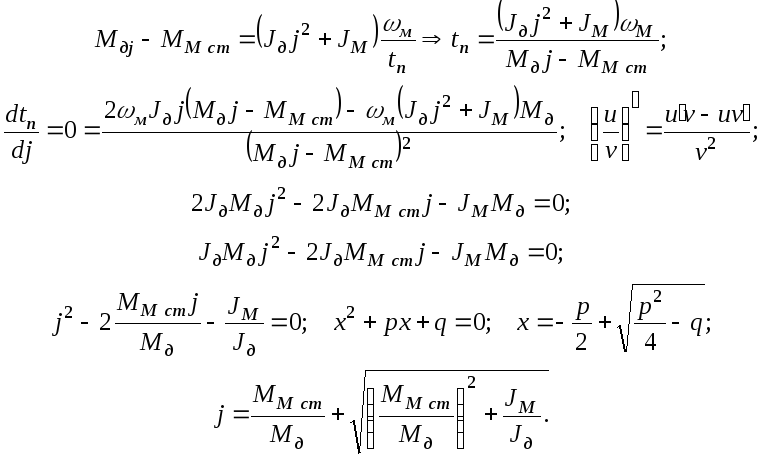
Тогда уравнение движения имеет вид:
,д
и ст
рм - const.
Тогда уравнение движения имеет вид:
![]() .
.
![]() ,
т.е.
,
т.е.
При
ММ
ст0
(пуск без нагрузки)
![]() ,
т.е.
,
т.е.![]() ,
тогда
,
тогда
![]() .
.
При оптимальном приведении jкинетическая энергия механизма равна кинетической энергии двигателя.
7.6. Оценка передаточного числа редуктора по минимуму массы и стоимости модуля
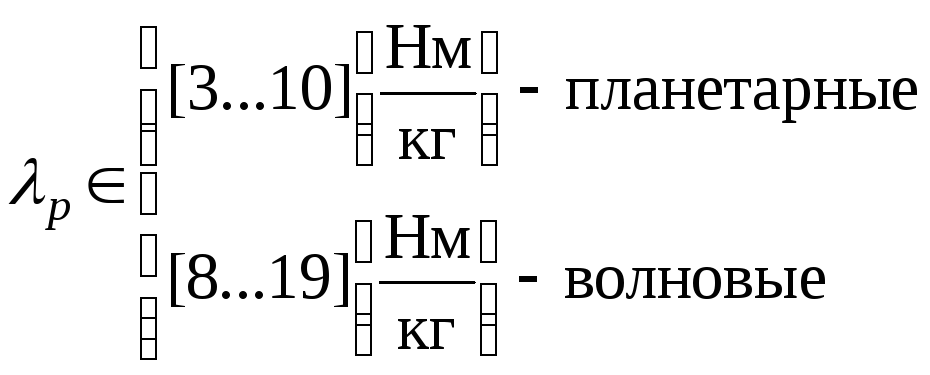
Для оценки уровня использования массы по моменту вводят показатели
![]() .
.
Примем р10д. Эти показатели значительно зависят от типа двигателя и диапазона мощностей. Для диапазона до 5 КВт
д[0,1…0,5]![]() ,
,
Д вигатель
и редуктор представляют собой
электромеханический модуль
вигатель
и редуктор представляют собой
электромеханический модуль
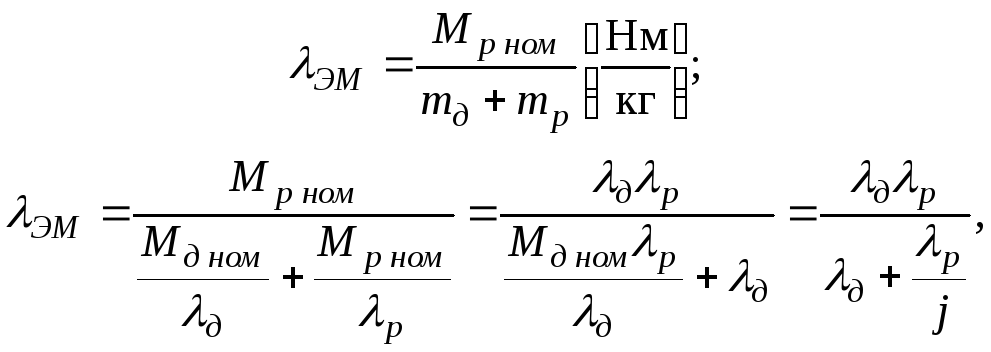
т.к. Мр=jМд.
Необходимо учитывать, что может иметь место безредукторный вариант (преимущественно в прецизионных безлюфтовых приводах), тогда ЭМ=д.
По
аналогии с вводят стоимостные показатели![]()
 ,
гдецдицред– цены двигателя и редуктора.
,
гдецдицред– цены двигателя и редуктора.
 .
.