

6.6. Использование моделей
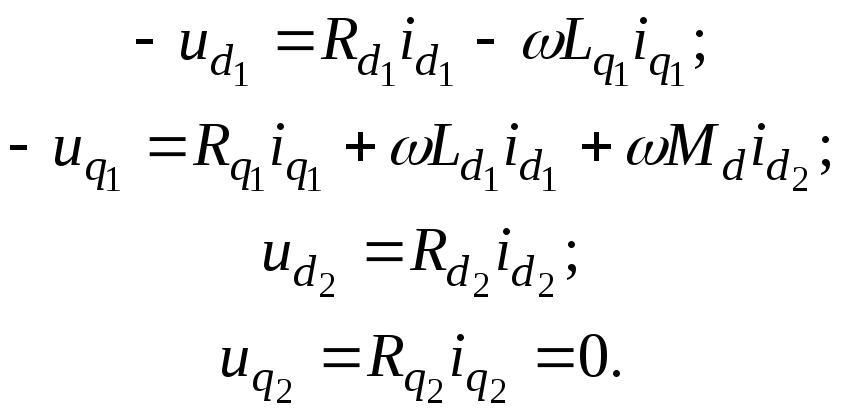
В качестве примера использования модели с координатными осями dиqрассмотрим синхронную явнополюсную машину с двумя полюсами на роторе и обмоткой якоря на статоре. Осьdнаправлена по оси полюсов ротора и содержит обмоткуd2(обмотку возбуждения), осьdне содержит обмоток на роторе. Пусть машина работает в генераторном режиме, когда напряжения на обмотках якоря не прикладываются извне, а определяются суммой ЭДС за вычетом падений напряжения на сопротивленииRв каждой обмотке, т.е.
![]() .
.
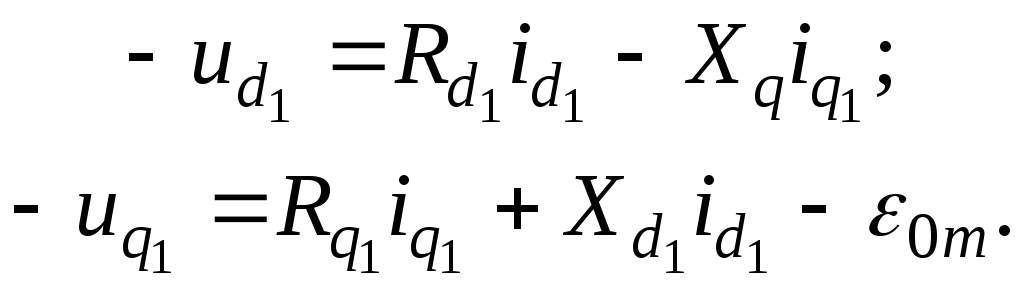
Допустим далее, что режим стационарный, т.е. р=0, и с учетом сделанных замечаний перепишем уравнения в виде
Введем обозначения:
![]() .
.
Параметры
XdиXq– индуктивные сопротивления якоря по
продольной и поперечной осям
соответственно. Величина0т
– амплитудное значение ЭДС
вращения![]() при
холостом ходе, когда
при
холостом ходе, когда![]() .
Первые
два уравнения запишутся в виде
.
Первые
два уравнения запишутся в виде
Напряжения
и токи реальных неподвижных статорных
обмоток могут рассматриваться как
проекции на оси обмоток изображающих
векторов
![]() и
и![]() ,
вращающихся относительно статора с
угловой частотой.
,
вращающихся относительно статора с
угловой частотой.
Так
как оси dиqв данном случае вращаются в ту же сторону
с той же частотой, векторы![]() и
и![]() неподвижны относительно осейdиq, а их проекции на
эти оси связаны уравнениями.
неподвижны относительно осейdиq, а их проекции на
эти оси связаны уравнениями.
Если
принять, что на оси dоткладываются действительные, а на осиq– мнимые числа, то![]() и
и![]() можно представить так:
можно представить так:
![]() .
.
Умножая
первое уравнение на (-1), второе - на (-j)
и суммируя их, при![]() ,
опуская для упрощения индекс «1» у
напряжений и токов.
,
опуская для упрощения индекс «1» у
напряжений и токов.
В результате получится
![]() .
.
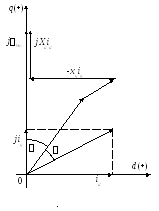
Этому уравнению соответствует пространственная векторная диаграмма в комплексной плоскости, приведенная на рисунке. Хотя эта диаграмма построена на основе пространственных изображающих векторов, она идентична обычной векторной диаграмме синхронного генератора, поскольку в обоих случаях мгновенные значения параметров определяются как проекции вращающихся векторов на некоторые неподвижные оси.
Угол
нагрузки на
диаграмме характеризует сдвиг по фазе
между![]() и
и![]() ,
а также пространственный сдвиг между
осями потока возбужденияФ0и полного потока якоряФ(при
пренебреженииR).
,
а также пространственный сдвиг между
осями потока возбужденияФ0и полного потока якоряФ(при
пренебреженииR).
Момент
Мэмдля рассматриваемой
машины, пренебрегая влиянием активных
сопротивлений обмоток (![]() ),
определяется с учетом проекций векторов
),
определяется с учетом проекций векторов
![]() ;
;
![]() .
.
Подставляя и переходя к действующим значениям 0,U, получится:
 .
.
Знак минус перед правой частью показывает, что в генераторном режиме электромагнитный момент является тормозным.
В теории синхронных машин часто выбирают положительное направление Мэмпротивоположным по отношению кМмех, т.е. считаютМэм>0,>0 в генераторном режиме иМэм<0,<0 в двигательном режиме.
Если синхронная машина имеет тфаз (а не две фазы, как в рассмотренном случае), то перед квадратной скобкой вместо 2 стоит множительт. Таким образом, с помощью модели с (d,q)-координатами получают более полную формулу для электромагнитного момента, чем формула для неявнополюсной модели в (,)-координатах, в которой учет магнитной несимметрии затруднителен.
Таким образом, модель машины с осями dиqописывается системой дифференциальных уравнений с постоянными коэффициентами, что существенно упрощает ее анализ по сравнению с предыдущей моделью. Кроме того, модель с осямиdиqпозволяет легко учесть явнополюсную конструкцию электрической машины.
Модель ЭМП с (d,q)-координатами позволяет эффективно исследовать переходные процессы в динамических режимах синхронной машины. В таких режимах помимо якорной обмотки и обмотки возбуждения важную роль играют демпферные обмотки.
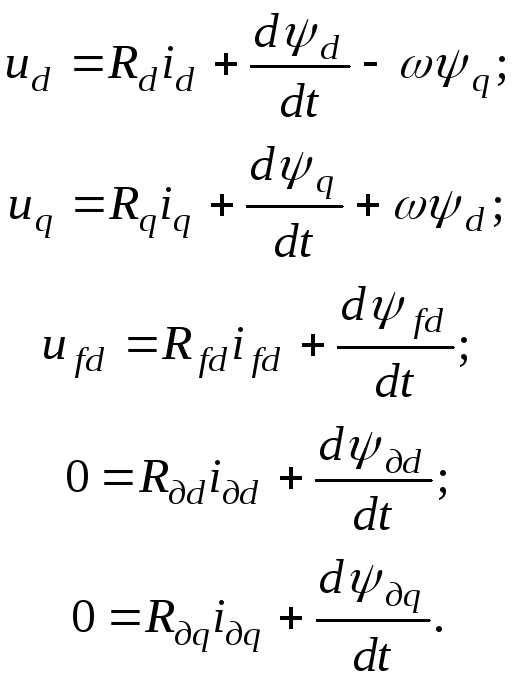
Модель с полюсами на роторе, дополненная короткозамкнутыми демпферными обмотками на осях dиq.
Полная система уравнений Парка-Горева для статорных обмоток якоря на осях dиq,обмотки возбуждения ротора на осиdи роторных демпферных обмоток на осяхdиqзапишется в виде
Считая, что обмотки ротора приведены к обмоткам статора, можно выразить потокосцепления обмоток статора и ротора в виде
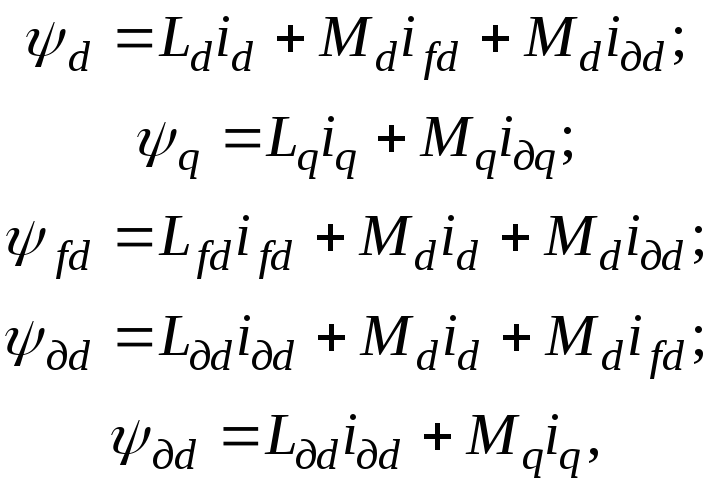
где LиМ– полная индуктивность обмотки и взаимная индуктивность между обмотками на соответствующих осях.
Ясно, что Lопределяется полным потоком, сцепленным с обмоткой,М– потоком взаимной индукции. Поэтому разностиL – M=Lсоответствуют потокам рассеяния обмоток, т.е.
![]()
Т.к. все обмотки неподвижны, то LиМ–const, т.к. это первые пространственные гармоники поля. Поэтому система уравнений Парка-Горева приводится к системе с постоянными коэффициентами и может решаться операторным методом относительно неизвестных токовidиiq.