

ПриклТеорияКолеб
.pdf
|
|
|
|
|
|
24 |
|
α(2)2 |
= − |
a11 − k22 |
α(1)2 = − |
a21 |
α(1)2 . |
(19б) |
|
a12 |
a22 − k22 |
||||||
|
|
|
|
|
Принято использовать коэффициенты χi( j) форм колебаний, которые вводят-
ся |
в соответствии |
с |
соотношением |
αi( j) = χi( j)α1( j) . Ясно, |
что |
при этом |
||||||
χ( j) =1, то есть в нашем случае χ(1) =1 |
и χ(2) =1. Два других коэффициента |
|||||||||||
1 |
|
|
|
|
|
|
1 |
1 |
|
|
||
|
χ(1)2 = − |
a11 − k12 |
|
, |
χ(2)2 |
= − |
a11 − k22 |
. |
|
(20а) |
||
|
|
|
|
|||||||||
|
|
|
a12 |
|
|
|
a12 |
|
€ |
|
||
|
|
|
|
|
|
|
|
|
|
и частот |
||
Подставив численные значения коэффициентов матрицы A |
(13) |
|||||||||||
свободных колебаний k1,2 (17) в равенства (20а), получим: |
|
|
||||||||||
χ(21) |
= −0,65 , |
χ(22) |
= 0,71. |
|
|
|
|
|
(20б) |
|||
Первая и вторая формы колебаний построены на рис. 8. Из рисунка видно, что первое главное колебание с меньшей частотой k1 = 61,5 рад/с является симметричным (в том смысле, что колеса поворачиваются в разные стороны), причем амплитуда колебаний колеса 2 приблизительно в полтора раза меньше амплитуды колебаний колеса 1. Главное колебание с большей частотой k2 = 93,2 рад/с является антисимметричным, при этом амплитуда колебаний колеса 2 в 1,4 раза меньше амплитуды колебаний колеса 1.
Уравнения (18а), определяющие первое главное колебание, примут вид
ϕ(1) |
= α(1) |
sin(61,5t + δ ) , |
ϕ(1) = −0,65α(1) |
sin(61,5t + δ ) . |
(21а) |
|||||
1 |
1 |
1 |
|
|
2 |
1 |
1 |
|
|
|
Уравнения (18б), определяющие второе главное колебание: |
|
|||||||||
ϕ(2) |
= α(2) sin(93,2t + δ |
2 |
) , |
ϕ(1) |
= 0,71α(2) sin(93,2t + δ |
2 |
) . |
(21б) |
||
1 |
1 |
|
|
2 |
1 |
|
|
|
||
χ(1) |
|
|
|
|
χ(2) |
|
|
|
||
ϕ2
ϕ1 |
q |
ϕ1 |
ϕ2 |
q |
Первая форма колебаний |
Вторая форма колебаний |
Рис. 8
3.4.Закон движения механической системы
Общее решение системы уравнений движения (12б) определяется линейной суперпозицией собственных форм колебаний рассматриваемой механической системы (21а) и (21б):
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
|
|
|
|
|
|
ϕ |
|
(t) = ϕ(1) |
+ϕ(2) |
= α(1) sin(k t +δ |
) +α(2) sin(k |
2 |
t +δ |
2 |
) , |
|
|
|
(22а) |
|||||||
1 |
1 |
1 |
1 |
|
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|||
ϕ |
2 |
(t) = ϕ(1) |
+ ϕ(2) |
=μ α(1) sin(k t + δ ) + μ |
2 |
α(2) sin(k |
2 |
t + δ |
2 |
) , |
|
(22б) |
||||||||
|
2 |
2 |
1 |
1 |
|
1 |
1 |
1 |
|
|
|
|
|
|
|
= χ(1) и |
||||
где введены обозначения для коэффициентов форм колебаний: |
μ |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
μ2 = χ(22) при условии, что χ1(1) =1 и χ1(2) =1.
Найдем из начальных условий постоянные интегрирования: амплитуды ко-
лебаний |
α(1) |
|
и α(2) , |
а также начальные фазы колебаний δ1 и δ2. Для этого |
|||||||||||||||||
|
|
|
1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
продифференцируем уравнения (22) по времени: |
|
|
|
||||||||||||||||||
ϕ |
(t) = k α(1) cos(k t + δ ) + k |
2 |
α |
(2) cos(k |
2 |
t + δ |
2 |
) , |
|
|
(23а) |
||||||||||
1 |
1 |
1 |
|
1 |
1 |
1 |
|
|
|
|
|
|
|
|
|
||||||
ϕ |
2 |
(t) =μ k α(1) cos(k t + δ ) + μ |
2 |
k |
2 |
α(2) cos(k |
2 |
t + δ |
2 |
) . |
(23б) |
||||||||||
|
1 1 |
1 |
1 |
1 |
|
|
|
1 |
|
|
|
|
|
|
|||||||
Уравнения (22) и (23) справедливы для любого момента времени t. Следовательно, при t = 0:
ϕ |
|
= α(1) sin δ +α(2) sin δ |
2 |
, |
|
|
|||||
10 |
1 |
|
1 |
1 |
|
|
|
|
(24а) |
||
|
|
= μ α(1) sin δ +μ |
|
α(2) sin δ |
|
||||||
ϕ |
20 |
2 |
2 |
, |
|||||||
|
1 |
1 |
|
1 |
1 |
|
|
|
|||
ϕ |
|
= k α(1) cosδ +k |
2 |
α(2) cosδ |
2 |
, |
|
|
|
|
|
|
||||||||||||
10 |
1 |
1 |
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
(24б) |
||||
ϕ |
|
= μ k α(1) cosδ +μ |
|
k |
|
α(2) cosδ |
|
. |
|
|
||||||||||||||
20 |
2 |
2 |
2 |
|
|
|
||||||||||||||||||
|
1 1 |
|
1 |
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||
Решая систему алгебраических уравнений (24), находим |
||||||||||||||||||||||||
tg δ = k |
μ2ϕ10 − ϕ20 |
, |
|
|
tg δ |
2 |
= k |
|
μ1ϕ10 − ϕ20 |
, |
||||||||||||||
|
1 1 μ |
2 |
ϕ − ϕ |
20 |
|
|
|
|
|
|
|
|
|
|
2 μ ϕ − ϕ |
20 |
|
|||||||
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
10 |
|
||||
|
(1) |
= |
(μ2ϕ10 − ϕ20 )2 + k1−2 (μ2ϕ10 |
− ϕ20 )2 |
|
(25) |
||||||||||||||||||
α1 |
|
|
|
|
|
(μ |
|
−μ |
2 |
)2 |
|
|
|
|
|
, |
|
|||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
(2) |
|
(μ1ϕ10 − ϕ20 )2 + k2−2 (μ1ϕ10 |
− ϕ20 )2 |
|
|
||||||||||||||||||
α1 |
= |
|
|
|
|
|
(μ |
|
−μ |
2 |
)2 |
|
|
|
|
|
. |
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставляя в выражения (25) численные значения входящих в них величин, получаем
α(1) |
= 0,00769 рад, α(2) = 0,00736 рад, |
(26) |
1 |
1 |
|
δ1 = arctg(−8,65) = −1,46 рад, δ2 = arctg(14,31) =1,50 рад. |
|
|
В итоге уравнения движения (22) механической системы примут вид |
|
|
ϕ1(t) = 0,00769sin(61,5t −1,46) + 0,00736sin(93,2t +1,50) , |
(27а) |
|
ϕ2 (t) = −0,00481sin(61,5t −1,46) + 0,00523sin(93,2t +1,50) . |
(27б) |
|
3.5. |
Исследование вынужденных колебаний |
|
С учетом обобщенных возмущающих сил
|
|
26 |
€ |
€ |
(28) |
Qвозм = F sin ωt , |
||
€
где F — вектор-столбец амплитуд возмущающих сил, уравнения Лагранжа
(1) можно записать в следующем виде:
|
€ |
|
€ |
q€+ A |
q€= f sin ωt , |
||
В нашем случае |
|||
€ |
M 0 |
|
|
F |
= |
|
. |
|
|
0 |
|
|
|
|
|
€ |
€ −1 |
€ |
(29) |
f |
= M |
F . |
|
|
|
|
(30) |
Тогда система неоднородных дифференциальных уравнений (29) примет вид
ϕ1 + a11ϕ1 + a12ϕ2 = m11−1M 0 sin ωt, |
(31) |
ϕ2 + a21ϕ1 + a22ϕ2 = 0. |
|
Решение системы уравнений (31) состоит из двух слагаемых, одно из которых является общим решением соответствующей однородной системы уравнений и для рассматриваемой механической системы определяется формулами (18). Второе слагаемое является частным решением неоднородной системы уравнений (29), которое ищем в виде гармонических колебаний с частотой ω:
ϕ1вын = h1 sin ωt, |
(32) |
|
ϕ2вын = h2 sin ωt. |
||
|
Подстановка решения (32) в уравнения (31) приводит к системе алгебраических уравнений для амплитуд вынужденных колебаний h1 и h2:
(a |
− ω2 )h + a h = m−1M |
0 |
, |
|
|||||
11 |
1 |
12 |
2 |
11 |
|
(33) |
|||
(a |
|
− ω2 )h + a |
|
h = 0, |
|
|
|||
22 |
21 |
|
|
|
|||||
|
2 |
|
1 |
|
|
|
|
||
решение которой находим по методу Крамера:
h = |
M 0 |
|
a22 − ω2 |
, |
h |
= − |
M 0 |
|
a21 |
, |
(34) |
|
|
|
|
||||||||
1 |
m11 |
|
2 |
m11 |
|
|
|||||
|
|
|
|
|
|
||||||
где определитель системы уравнений
= (a11 − ω2 )(a22 − ω2 ) − a12a21 = (ω2 − k12 )(ω2 − k22 ) .
Здесь мы воспользовались теоремой Виета, в соответствии с которой квадратный трехчлен может быть представлен в виде произведения двух сомножителей, в которые входят корни этого трехчлена, являющиеся в нашем случае квадратами собственных частот колебаний механической системы (см. уравнение (16)).
Тогда для рассматриваемой механической системы в соответствии с (32) для вынужденных колебаний запишем
ϕ1вын = H11M 0 sin ωt , ϕ2вын = H21M 0 sin ωt , (35)
где введены коэффициенты гармонического влияния:

|
|
|
|
|
|
|
|
|
|
27 |
H11 |
= |
|
(a22 −ω2 )m11−1 |
|
|
, |
|
(36а) |
||
(ω2 −k 2 )(ω2 −k |
2 ) |
|
||||||||
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
a |
21 |
m−1 |
|
|
|
|
|
H21 = − |
|
11 |
|
|
|
. |
(36б) |
|||
(ω2 − k |
2 )(ω2 − k |
2 ) |
||||||||
|
|
|
1 |
|
|
2 |
|
|
|
|
Из системы уравнений (31) найдем значения углов поворота дисков при статическом действии момента, равного амплитуде возмущающего воздействия (M = M0). При этом sinωt = 1, а ϕ1 = ϕ2 = 0 . В результате получаем
ϕ |
= |
|
a22 |
|
M |
0 |
, |
ϕ |
2сста |
= − |
a21 |
ϕ |
. |
(37) |
||
a a |
|
|
|
|||||||||||||
1стат |
|
22 |
−a a |
21 |
|
|
|
|
a |
22 |
1сста |
|
|
|||
|
|
11 |
12 |
|
|
|
|
|
|
|
|
|
|
|||
С помощью (37) перепишем уравнение (35) через статические значения углов поворота:
ϕ1вын = Φ1(ω)ϕ1стат sin ωt , |
ϕ2вын = Φ2 (ω)ϕ2стат sin ωt , |
(38) |
|||||||||
где |
(a11a22 −a12a21)m11−1 a22 −ω2 |
|
|
||||||||
Φ1(ω) = |
|
|
|||||||||
|
|
|
|
|
|
|
|
, |
|
(39а) |
|
|
(ω2 −k |
2 )(ω2 |
−k 2 ) |
|
|
||||||
|
|
a22 |
|
|
|||||||
|
1 |
|
2 |
|
|
|
|
|
|
||
|
|
(a a |
−a a |
21 |
)m−1 |
|
|
|
|
||
Φ2 (ω) = |
11 22 |
12 |
11 |
. |
|
|
|
(39б) |
|||
|
|
|
|
|
|
|
|
||||
|
|
(ω2 −k 2 )(ω2 −k 2 ) |
|
|
|
|
|||||
|
|
|
1 |
|
2 |
|
|
|
|
€ |
|
Учитывая численные значения элементов матрицы |
|
||||||||||
A и матрицы коэффици- |
|||||||||||
€
ентов инерции M , для коэффициентов динамичности получим
K |
=| Φ (ω) |= |
|
1618 (6340 − ω2 ) |
, |
(40а) |
||
|
|
|
|||||
1дин |
1 |
(ω2 −3781)(ω2 −8684) |
|
|
|
||
|
|
|
|
|
|||
K2дин =| Φ2 (ω) |= |
|
10260700 |
|
|
. |
(40б) |
|
|
|
|
|||||
|
(ω2 −3781)(ω2 −8684) |
|
|||||
|
|
|
|
|
|
||
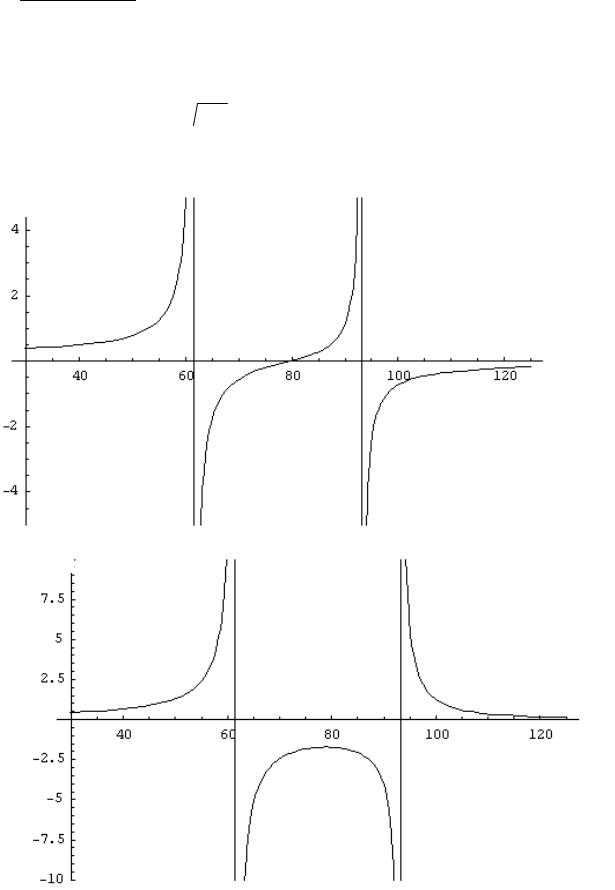
Рассмотрим поведение Φ1(ω) и Φ2(ω) для трех интервалов изменения частоты возмущающего момента: а) 0 ≤ ω< k1; б) k1 < ω< k2 ; в) k2 < ω< ∞ (см.
рис. 9).
а) 0 ≤ ω< 61,5 .
В этом случае знаменатель в формулах (39) положителен. Следовательно, Φ1 > 0 и Φ2 > 0. С ростом частоты ω амплитуды колебаний обоих колес возрастают, причем их колебания происходят в одной фазе с изменением возмущающего момента. При ω = k1 в системе наступает первый резонанс и функции Φ1(ω) и Φ2(ω) претерпевают бесконечный разрыв. При действии момента сил резонансной частоты амплитуды колебаний возрастают пропорционально времени.
28
б) 61,5 < ω<93,2 .
В этом случае знаменатель в формулах (39) отрицателен. Следовательно, на рассматриваемом интервале частот Φ2 < 0, то есть, колебания колеса 2 про-
исходят в противофазе с изменением возмущающего момента.
Для определения знака функции Φ1(ω) нужно рассмотреть числитель форму-
лы (39а). Если k1 < ω<  a22 ( 61,5 < ω< 79,3), то Φ1 < 0 и колебания колеса 1, так же как и колеса 2, происходят в противофазе с изменением возмущающего
a22 ( 61,5 < ω< 79,3), то Φ1 < 0 и колебания колеса 1, так же как и колеса 2, происходят в противофазе с изменением возмущающего
Φ1
ω, с–1
ω = k1 |
|
ω = k2 |
|
|
|
Φ2
ω, с–1
ω = k1 |
|
ω = k2 |
|
|
|
29
Рис. 9
момента. Если же  a22 < ω< k2 ( 79,3 < ω<93,2 ), то Φ1 > 0 и колебания колеса 1 происходят синфазно с изменением M. При ω= a22 = 79,3 с–1, Φ1 = 0.
a22 < ω< k2 ( 79,3 < ω<93,2 ), то Φ1 > 0 и колебания колеса 1 происходят синфазно с изменением M. При ω= a22 = 79,3 с–1, Φ1 = 0.
Вэтом случае колесо 2 можно рассматривать как гаситель колебаний колеса
1.Явление отсутствия вынужденных колебаний колеса при действии на него
возмущающего момента частоты ω= a22 называется антирезонансом, а
само значение частоты – антирезонансной частотой. При ω = k2 = 93,2 в системе наступает второй резонанс.
в) 93,2 < ω< ∞.
В этом случае знаменатель в формулах (39) положителен. Так как k2 > a22 ,
то Φ1 < 0, а Φ2 > 0. С ростом частоты ω амплитуды вынужденных колебаний обоих колес уменьшаются, стремясь к нулю. Колебания колеса 1 происходят в противофазе, а колеса 2 — в одной фазе с изменением возмущающего момента.
30
ЛИТЕРАТУРА
1.Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний.–М: Наука, 1981.
2.Бабаков И.М. Теория колебаний. – М: Наука, 1965.
3.Бидерман В.Л. Теория механических колебаний. – М.: Высш. шк., 1980.
4.Бицено К.Б., Граммель Р. Техническая динамика.–М.: ГИТТЛ, 1952.–Т.2.
5.Бутенин Н.В., Неймарк Ю.И., Фуфаев Н.А. Введение в теорию нелинейных колебаний. – М.: Наука, 1987.
6.Вибрации в технике. Справочник: В 6 т./ Ред. совет: В.Н. Челомей (предс.). – М.: Машиностроение, 1978 – 1982.
7.Вихренко В.С. Линейные колебания в системах с дискретными параметрами. – Минск: БТИ, 1993.
8.Вихренко В.С. Устойчивость и нелинейные колебания.–Минск: БТИ, 1993.
9.Вихренко В.С. Численные методы в теории линейных колебаний. – Минск: БГТУ, 1995.
10.Вихренко В.С. Колебания упругих балок и пластин.– Минск: БГТУ, 1996.
11.Пановко Я.Г. Введение в теорию механических колебаний. – М.: Наука, 1980.
12.Пановко Я.Г., Губанова И.И. Устойчивость и колебания упругих систем.
– М.: Наука, 1979.
13.Потсон Т., Стюарт Н. Теория катастроф и ее приложения.–М.: Мир, 1980.
14.Сборник заданий для курсовых работ по теоретической механике / Под ред. А.А. Яблонского. – М.: Высш. шк., 1985.
15.Тимошенко С.П. Колебания в инженерном деле. – М.: Физматгиз, 1963.
|
СОДЕРЖАНИЕ |
|
Введение ................................................................................................................... |
3 |
|
Программа курса...................................................................................................... |
4 |
|
Задача 1. Исследование устойчивости положений равновесия механической |
||
системы и построение диаграммы устойчивости................................................. |
5 |
|
Задача 2. Интегрирование уравнений движения системы с кусочно-линейной |
||
характеристикой методом припасовывания (сшивки решений)....................... |
12 |
|
2.1 |
Составление дифференциального уравнения движения ............................. |
12 |
2.2 |
Интегрирование уравнения движения по методу припасовывания........... |
14 |
Задача 3. Исследование свободных и вынужденных колебаний механической |
||
системы с двумя степенями свободы................................................................... |
21 |
|
3.1. Составление уравнений движения................................................................ |
23 |
|
3.2 |
Нахождение собственных частот и форм колебаний................................... |
26 |
3.3 |
Формы главных колебаний............................................................................. |
26 |
3.4 |
Закон движения механической системы....................................................... |
28 |
3.5 |
Исследование вынужденных колебаний....................................................... |
29 |
Литература.............................................................................................................. |
37 |
|
31
32
33