

ПриклТеорияКолеб
.pdfМинистерство образования Республики Беларусь
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра теоретической механики
ПРИКЛАДНАЯ ТЕОРИЯ КОЛЕБАНИЙ
Программа курса, методические указания и задания к расчетной работе
для студентов специальности 1-36 05 01
Минск 2002
5
УДК 534
Рассмотрены и рекомендованы к изданию редакционно-издательским советом университета.
Составители: В.С. Вихренко, А.В. Кондратенко
Рецензент доцент кафедры лесных машин и технологии лесозаготовок С.П. Мохов
По тематическому плану изданий учебно-методической литературы университета на 2002 год. Поз. 42.
Для студентов специальности 1-36 05 01 «Машины и оборудование лесного комплекса»
©Учреждение образования «Белорусский государственный технологический университет», 2002
©Вихренко В.С., Кондратенко А.В., составление, 2002
6
ВВЕДЕНИЕ
Движение механизмов, машин, манипуляторов и других механических устройств, как правило, сопровождается колебаниями их отдельных частей друг относительно друга, которые привносят в поведение устройств существенные особенности, отличающиеся большим разнообразием. Устойчивость равновесия и движения различных устройств играет важнейшую роль в обеспечении их работоспособности и безопасности эксплуатации. Исследование устойчивости в значительной мере связано с анализом движения при отклонениях от равновесия или от невозмущенного движения. Этот анализ выполняется методами, обычно используемыми в теории колебаний. Поэтому приведенная ниже программа курса «Прикладная теория колебаний» включает в себя и вопросы по устойчивости движения и теории катастроф.
Целью курса является ознакомление студентов с основными особенностями поведения механических систем при наличии колебательных процессов, приобретении ими навыков составления уравнений движения и анализа их решений в отдельных случаях.
В основе теории колебаний лежат сведения из теоретической механики, теории машин и механизмов, сопротивления материалов. В ней широко используются математические методы. Для изучения теории колебаний студентам четвертого курса необходимо вспомнить материал этих фундаментальных и общеинженерных дисциплин, изучавшихся на младших курсах. Поэтому предлагаемый курс следует рассматривать как одно из звеньев непрерывной фундаментальной подготовки студентов, являющейся неотъемлемой частью учебного процесса в университете.
По теории колебаний в 50 – 80-х годах XX столетия было издано огромное количество литературы. В конце пособия приведены ссылки на книги, которые могут быть использованы как при прохождении данного курса, так и для дальнейшего более глубокого изучения теории колебаний и устойчивости движения. Более полный список литературных источников может быть найден в пособиях [6 – 9] и цитируемых в них работах.
Для закрепления полученных знаний предлагается расчетная работа, которую студенты должны выполнить в соответствии со своими индивидуальными вариантами. Порядок выбора вариантов задач указывает преподаватель. Расчетная работа выполняется в ученических тетрадях или на листах формата А4. В каждой задаче приводятся схема, аккуратно выполненная с использованием чертежных принадлежностей или графических редакторов, краткое условие и исходные данные. Решение задач должно сопровождаться пояснениями и необходимыми схемами или рисунками. В пособии даны примеры оформления и методические указания к решению задач. Формулы нумеруются в каждой задаче отдельно. При составлении задач использовался Сборник заданий [14]. Составители выражают благодарность студентам А.Ф. Аникеенко и В.П. Толкачеву за помощь в подготовке рисунков.
7
ПРОГРАММА КУРСА
Фазовые переменные и фазовое пространство механической системы. Фазовые портреты автономных механических систем с одной степенью свободы. Фазовые портреты линейных механических систем и классификация особых точек (центр, фокус, узел, седло). Сепаратрисы. Фазовый портрет физического маятника.
Устойчивость равновесия и движения механических систем. Исследование устойчивости по первому приближению и с помощью функций Ляпунова. Показатели Ляпунова. Теорема Лагранжа – Дирихле. Устойчивость равновесия системы со многими степенями свободы. Критерий Сильвестра.
Элементы теории катастроф. Диаграммы устойчивости и бифуркационные диаграммы стационарных механических систем. Ферма Мизеса. Катастрофы типа сборки и складки.
Нелинейные колебания и методы их исследования. Метод гармонического баланса. Скелетные (каркасные) кривые слабо нелинейных систем с одной степенью свободы. Амплитудно-частотные характеристики. Вынужденные колебания систем с мягкой и жесткой характеристиками. Супер- и субгармонические колебания. Устойчивость колебаний.
Параметрические колебания и параметрический резонанс. Маятник Капицы. Уравнение Матье. Диаграмма Айнса-Стрэтта.
Автоколебания. Метод медленно меняющихся амплитуд. Устойчивый и неустойчивый предельные циклы. Автоколебания в станках.
Собственные колебания системы со многими степенями свободы. Собственные частоты и собственные формы колебаний. Спектр колебаний. Резонанс и антирезонанс. Динамическое гашение колебаний. Самосинхронизация колебаний и ее использование для виброзащиты. Функция Релея и влияние сопротивления на амплитудно-частотные характеристики. Использование диссипации для гашения колебаний. Колебания в станках и механизмах. Методика составления уравнений колебаний многомассовых систем (передаточные механизмы, транспортные машины). Дискретизация уравнений движения упругих тел (многомассовые модели деревьев, хлыстов).
Колебания непрерывных упругих систем. Дифференциальное уравнение поперечных колебаний балки и его интегрирование с помощью функций Крылова. Начальные и граничные условия. Собственные частоты и собственные формы колебаний. Вынужденные поперечные колебания балки. Зависимость амплитуды колебаний от точки приложения вынуждающей силы. Динамические коэффициенты влияния.
Поперечные колебания круглых и прямоугольных пластин. Дифференциальное уравнение поперечных колебаний тонких пластин. Собственные формы колебаний. Зонтичные и веерные колебания. Колебания круглых дисковых пил и их устойчивость.

8
ЗАДАЧА 1
Исследование устойчивости положений равновесия механической системы и построение диаграммы устойчивости
Условие задачи.
Система состоит из нескольких тел и пружин жесткости ci . lio − естественная длина i-й пружины; γ − удельный вес единицы длины стержня или нити; L – длина нити. Заданы веса тел Gi , геометрические параметры и со-
отношение α между жесткостью пружины и весом одного из тел или между весами двух тел. Схемы систем приведены на стр. 9 – 11. Требуется определить положения равновесия ϕe в зависимости от коэффициента α , исследо-
вать их устойчивость и построить диаграмму устойчивости ϕе = ϕе(α) .
Должны быть использованы следующие соотношения между параметрами:
Тип А. c1 = c, c2 = 2c, a =  2l, G1 = G, G2 = 2G, G3 = 4G,
2l, G1 = G, G2 = 2G, G3 = 4G,
α = cl/G (для четных вариантов) или α = G / cl (для нечетных вариантов).
Тип Б. c1 = 2c, c2 = c, a =  3l, G1 = 2G, G2 = G, G3 = 3G,
3l, G1 = 2G, G2 = G, G3 = 3G,
α = cl/G (для нечетных вариантов) или α = G / cl (для четных вариантов).
Тип В. c1 = 2c, c2 = 3c, a =1.5l, G1 = 2G, G 2 = 4G, G3 = 3G,
α = cl/G (варианты 1 – 15) или α = G / cl (варианты 16 – 30). Дополнительные условия для вариантов:
1) l10 = l, l20 =1.5l. 2) l0 =l . 3) l0 = 2l . 4) l0 = 2R . 5) 0 ≤ ϕ < π, l0 = 2l . 6) l0 =1.5l . 7) l0 = b . 8) l0 = b . 9) l0 =1.5l . 10) l0 = 3l, G3 = G2 .
11) l10 =1.5l, l20 = 2l . 12) l0 =1.5l . 13) l0 = l . 14) 0 ≤ ϕ < π, l0 = 3l . 15) l0 = 2l . 16) l0 = 4l . 17) l0 = 4l . 18) γ2 = G2 / l , α = G1 / G2 .
19)l10 = 2l, l20 = 2l . 20) l0 = 2R . 21) α = G1 / G2 .
22)L = a + l, b =3l, l0 = 2l . 23) l0 = b − l . 24) l0 = b − l . 25) l0 = l .
26)L = 2.5l, l0 = l . 27) α = G2 / G1. 28) α =G1 / γR . 29) L = 2l, l0 =l .
30)L = 4l, γl = G2 , α = G2 / G1.
Рисунки на стр. 34–36.
Методические указания и пример решения задачи
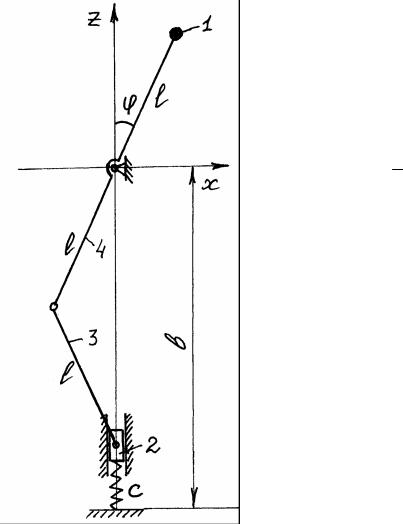
Дано: схема механизма, состоящего из четырех тел и пружины, а также соотношения между его параметрами G1 = 9G, G2 = 2G, γl = 2G,
G = αcl , b = 2l + l0 (см. рис. 1).
Необходимо: найти положения равновесия механизма в зависимости от параметра α и построить диаграмму устойчивости системы.
Решение.
Потенциальная энергия тела в поле сил тяжести
∏ = mgz = Qz,
где m – масса и Q – вес тела; z – вертикальная координата центра тяжести,
9
отсчитываемая от некоторого произвольно выбранного начала отсчета.
Находим: |
|
|
|
|
∏1 = G1l cos ϕ, |
∏2 = −G2 2l cos ϕ, |
|||
∏3 = −γl |
3 |
l cos ϕ, |
∏4 = 0, |
|
2 |
||||
|
|
|
||
∏тяж = ∏1 +∏2 +∏3 +∏4 =
=G1 − 2G2 − 3 γl l cosϕ= 2Gl cosϕ.
2
Потенциальная энергия сил упругости
|
|
|
|
|
|
|
|
∏упр = |
1 |
сλ2 = |
1 |
е(b − 2l cos ϕ − l0 )2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
или |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
∏упр = 2сl 2 (`1 − cos ϕ)2 . |
|
|||||||||
|
|
|
|
|
|
|
|
Таким образом, потенциальная энергия |
||||||||||
|
|
|
|
|
|
|
|
системы |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
∏ = 2Gl cos ϕ + 2cl 2 (1 − cos ϕ)2 = |
|
|||||||||
|
|
|
|
|
|
|
|
= 2Gl 2 [αcos ϕ + (1 − cos ϕ)2 ]. |
(1) |
|||||||||
|
|
|
|
|
|
|
|
В положении |
равновесия потенциальная |
|||||||||
|
|
|
|
|
|
|
|
энергия стационарна, т.е. |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
d ∏ |
|
|
|
= 0 , |
(2) |
|||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
dϕ |
|
|
||||||
|
|
|
|
Рис. 1 |
|
|
|
|
ϕ=ϕe |
|
|
|
||||||
|
|
|
|
|
|
|||||||||||||
где ϕе – значение угла ϕ в положении равновесия. |
|
|
|
|||||||||||||||
Находим производную потенциальной энергии |
|
|||||||||||||||||
|
d ∏ |
= 2cl2 [− αsin ϕ + 2(1 − cosϕ)sin ϕ]= 2cl2 (2 − α − 2cosϕ)sin ϕ. |
(3) |
|||||||||||||||
|
|
|||||||||||||||||
|
dϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Приравнивая это выражение к нулю, находим положения равновесия: |
|
|||||||||||||||||
а) sin ϕ1,2 = 0 |
ϕ1 = 0, |
ϕ2 = π; |
|
|
|
|
||||||||||||
б) 2 − α − 2сosϕ3 = 0 , |
|
|
|
|
|
|
|
|
|
|
(4a) |
|||||||
cos ϕ3 = |
2 − α |
, |
ϕ3 |
= arccos |
2 − α |
. |
|
|
(4б) |
|||||||||
|
|
|
|
|
||||||||||||||
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|||||||
Последний корень существует, если |
|
|
|
|
||||||||||||||
−1 ≤ |
2 − α |
≤1. |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Решая это неравенство, получим |
|
|
|
|
||||||||||||||
0 ≤ α ≤ 4. |
|
|
|
|
|
|
|
|
|
|
|
(5) |
||||||
10
Исследуем положения равновесия на устойчивость. В соответствии с теоремой Лагранжа – Дирихле критерием устойчивости положения равновесия является неравенство
d 2 ∏ |
|
> 0. |
(6) |
dϕ2 |
|
||
|
ϕ=ϕ |
|
|
|
|
||
|
|
e |
|
На основании уравнения (3) находим вторую производную потенциальной энергии
d 2Π |
= 2cl2 [(2 − α − 2cosϕ)cosϕ + 2sin2 ϕ]. |
(7) |
|
dϕ2 |
|||
|
|
Здесь правая часть сформирована так, чтобы в круглых скобках было выделено выражение, составляющее левую часть уравнения (4а). Это упрощает последующий анализ.
Подставляем в уравнение (7) равновесные значения угла ϕ и анализируем знак полученного выражения:
1) |
d 2 ∏ |
|
= 2cl 2 (−α) < 0 , |
|
dϕ2 |
||||
|
|
ϕ=0 |
||
|
|
|
положение равновесия неустойчиво.
2) |
d 2 ∏ |
|
= 2cl 2 [(4 − α) (−1)]= 2cl 2 (α − 4) . |
|
dϕ2 |
||||
|
|
ϕ=±π |
||
|
|
|
Это положение равновесия устойчиво при α < 4.
3) |
d 2 ∏ |
|
= 4cl 2 sin 2 ϕ3 > 0 , |
|
dϕ2 |
||||
|
|
ϕ=ϕ |
||
|
|
|||
|
|
3 |
||
поскольку при ϕ = ϕ3 выражение в круглых скобках в правой части (7) об-
ращается в нуль (см. уравнение (4a)). Это положение равновесия устойчиво при всех значениях α, при которых оно существует, т.е. при 0 < α < 4 .
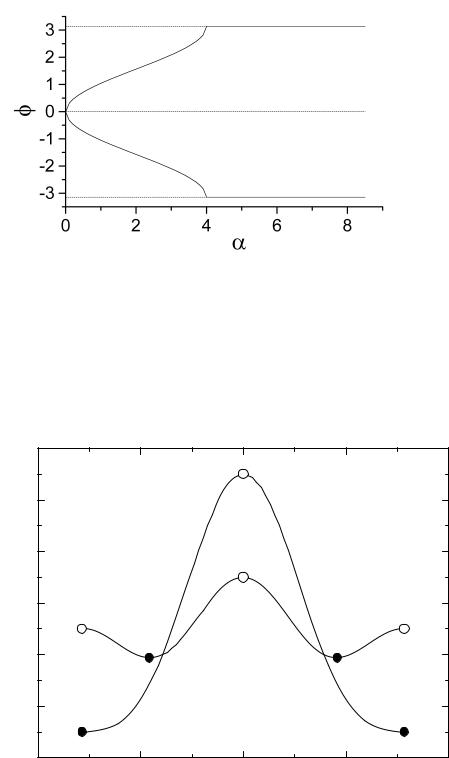
Строим диаграмму устойчивости (рис. 2) положений равновесия (бифуркационную диаграмму). Сплошные линии соответствуют устойчивым положениям равновесия, пунктирные – неустойчивым.
На диаграмме устойчивости существует две точки, в которых происходит бифуркация (удвоение количества) решений: (ϕ=0, α=0) и (ϕ=±π, α=4). Отметим, что два значения угла ϕ=±π соответствуют одной и той же физической ситуации, когда груз 1 занимает крайнее нижнее положение.
Строим зависимость потенциальной энергии от угла ϕ при значениях параметра α, соответствующих различным количествам положений равновесия: α=0; 1; 2; 3; 4; 5 и т.д. На рис. 3 в качестве примеров построены зависи-
мости потенциальной энергии (в единицах 2Gl2 ) от угла поворота стержня 4 при двух значениях параметра α=2.5 (кривая 1) и 4.5 (кривая 2). Светлые
11
кружки обозначают положения неустойчивых равновесий (максимумы потен-
Рис. 2
циальной энергии), тогда как темные кружки соответствуют устойчивым положениям равновесия (минимумы потенциальной энергии). Графики показывают, что положение φ=0 неустойчиво при произвольных значениях параметра α, тогда как при φ=±π неустойчивое положение при малых значениях параметра α переходит в устойчивое при α>4. Увеличение параметра α соответствует уменьшению жесткости пружины или увеличению веса тел системы.
Π/2Gl 2
5 |
|
|
|
|
4 |
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
2 |
|
|
1 |
|
1 |
|
|
|
|
0 |
|
|
|
|
-1-4 |
-2 |
0 |
2 |
4 |
|
|
φ |
|
|
Рис. 3
12
ЗАДАЧА 2
Интегрирование уравнений движения системы с кусочно-линейной характеристикой методом припасовывания (сшивки решений)
Условие задачи.
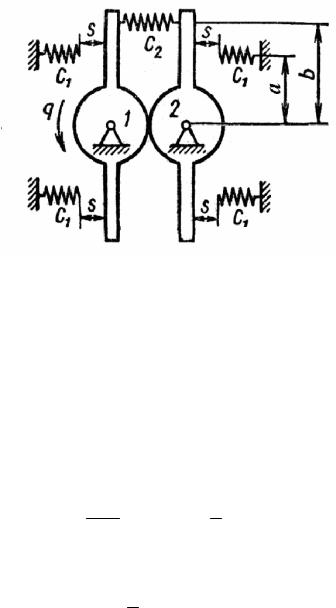
Система состоит из нескольких тел и пружин, жесткости ci которых обозначены на рисунках (см. с. 18 – 20). Заданы массы и/или моменты инерции тел системы. Необходимо сформулировать дифференциальное уравнение движения системы, проинтегрировать его при заданных начальных условиях, определить период колебаний и построить фазовую траекторию.
Рисунки на стр. 37–39.
Методические указания и пример решения задачи
Дано: m=20кг, i=0,1м, c1=2,5н/см, a=0,2м, b=0,25м, c2=1,0н/см, s=0.02м, q0=0.2 рад, q0 = 0 . При вертикальных стержнях пружина 2 не напряжена, i – радиус инерции тел 1 и 2 относительно их осей вращения (см. рис. 4).
Необходимо: построить фазовую траекторию системы и определить период коле-
Рис. 4. баний.
Решение.
2.1. Составление дифференциального уравнения движения
Воспользуемся уравнением Лагранжа
d |
|
∂Κ |
|
|
∂Κ |
|
∂Π |
|
|
|
|
|
− |
= − |
. |
(1) |
|||||
|
|
|
|
|||||||
|
|
∂q |
|
|
∂q |
|
∂q |
|
||
dt |
|
|
|
|
||||||
В качестве обобщенной координаты выберем угол поворота тела 1. Кинетическая энергия системы, состоящей из двух вращающихся тел
Κ = 2 Jq22 = mi2 q 2 = 12 J прq 2 ,
где момент инерции тела J=mi2; i – радиус инерции; Jпр=2mi2 – приведенный момент инерции системы. Потенциальная энергия системы
Π = c1λ21 + 12 c2 λ22 .
Здесь учтено, что одновременно работают две пружины жесткости с1. Деформации пружин при условии малых колебаний (tgq q) определяются сле-
13
дующими соотношениями:
|
|
0 |
при |
|
q |
|
< S / a, |
|
|
|
|||||
|
|
|
|
|
|
|
|
λ1 |
|
при |
|
q > S / a, |
|||
= − qa + S |
|
||||||
|
|
qa + S |
при |
q < −S / a, |
|||
|
|
|
|
|
|
|
|
λ2 = 2bq.
Знаки деформаций выбраны так, чтобы растянутым пружинам соответствовали положительные деформации. Пружины жесткости с1 работают только на сжатие, пружина жесткости с2 бывает сжатой или растянутой в зависимости от знака обобщенной координаты q.
В результате потенциальная энергия системы
|
|
|
|
|
|
|
|
|
|
|
2c2b2q2 |
|
|
|
|
|
при |
|
q |
|
< S / a, |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при |
|
q > S / a, |
|
|||||||||||||
Π = 2c2b2q2 + c1(S − qa)2 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
2c |
2 |
b2q2 + c |
(S |
+ qa)2 |
при |
q < −S / a. |
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисляем производные: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
∂Κ |
|
|
|
|
|
|
|
|
|
|
∂Κ |
|
|
|
|
d |
|
|
∂Κ |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
= J |
пр |
q, |
|
|
|
|
= 0, |
|
|
|
|
|
|
= J |
пр |
q; |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
∂q |
|
|
|
|
|
|
|
∂q |
|
|
|
|
dt |
|
|
|
∂q |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
∂Π |
|
|
|
|
|
|
|
|
|
|
4c2b2 q |
|
|
|
|
при |
|
|
|
q |
|
< s / a, |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|||||
|
∂q |
|
|
|
|
|
|
|
2 q + 2c1a(qa s) |
при |
|
|
q |
± s / a. |
|
||||||||||||||||||||||||
|
|
|
4c2b |
|
|
< |
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Следовательно, уравнение Лагранжа приобретает вид |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
− c |
2пр |
q |
|
|
при |
|
q |
|
< s / a, |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
J прq = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
||||||||
|
− |
с |
|
|
q |
2c as |
при |
q > |
± s / a, |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1пр |
|
|
|
|
|
1 |
|
|
|
|
|
< |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где приведенные коэффициенты жесткости |
|
||||||||||||||||||||||||||||||||||||||
c |
2пр |
= 4с |
2 |
b2 , c |
|
|
= 4с |
2 |
b2 |
+ 2c a 2 . |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1пр |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Правая часть уравнения (2) представляет собой обобщенную силу Q, которая является кусочно-линейной функцией обобщенной координаты. Ее график (характеристика) представлен на рис. 5. Здесь римскими цифрами отмечены три участка значений q>s/a, q < s / a и q<-s/a.
Окончательно дифференциальное уравнение движения представим как
q + k |
2 |
0, |
(3) |
i |
q = |
||
|
σ, |
|
|
где σ = 2c1as / Jпр; ki = |
ciпр / Jпр, i =1,2. Индекс i=1 соответствует ин- |
||
тервалу изменения обобщенной координаты q < s / a, а i=2 − q > S / a.
|
|
Находим численные значения введенных |
величин: |
c1пр = 45Нм/рад, |
|||||
c |
2пр |
= 25Нм/рад, J |
пр |
= 0,4кгм2 , σ = 5 рад/с2 , k |
|
=10,6 с-1, |
k |
2 |
= 7,9 с-1 . |
|
|
1 |
|
|
|
||||