

Автоматика(лабораторные работы) v1.5
.2.pdfЛабораторная работа № 1
ИССЛЕДОВАНИЕ ИЗМЕРИТЕЛЬНЫХ СХЕМ С ДАТЧИКАМИ ТЕМПЕРАТУРЫ
Цель работы – изучение методов измерения температуры (ртутным тер- мометром, манометрическим термометром, термометром сопротивления), а также систем автоматического контроля температуры.
При измерении технологических параметров основными являются методы непосредственной оценки и сравнения с мерой.
Метод непосредственной оценки заключается в оценке значения физиче-
ской величины непосредственно по отсчётному устройству средства измерения
(рис. 1.1, а).
Показания |
x |
c |
x |
|
Показания |
x |
c |
Нуль |
ИЦ прибора |
|
ИЦ |
x |
|||||
|
|
|
прибора |
ИН |
||||
а |
|
|
xм |
|
|
|
xм |
Показания |
|
М |
|
б |
|
|
М |
прибора |
|
|
|
|
|
|
|
в |
||
|
|
|
|
|
|
|
|
Рис. 1.1. Структурная схема методов измерения:
ИЦ - измерительная цепь; ИН - индикатор нуля; С - сумматор; М – мера
Метод сравнения с мерой основан на сравнении измеряемой величины с мерой. Мера – это такой элемент измерительной цепи, предназначенный для частичного или полного уравновешивания измеряемого параметра. В диффе- ренциальном (разностном) методе разность между величиной меры xм и изме- ряемой величиной x преобразуется в показания измерительного прибора (рис. 1.1, б). При нулевом (компенсационном) методе измеряемая величина полностью уравновешивается величиной переменной меры, что определяется индикатором нуля ИН (рис. 1.1, в). Показанием прибора здесь является величи- на переменной меры.
1.1. Измерение температуры манометрическим термометром
Манометрические термометры состоят из термобаллона и измерительного прибора давления (манометра), соединенных между собой капилляром, длина которого достигает 60 м. Термобаллон размещается в среде, где измеряется температура. Температура среды воздействует на физическое состояние веще- ства внутри баллона, что приводит к изменению давления, которое через ка- пиллярную трубку передается на расстояние и фиксируется манометром. В ка- честве чувствительных веществ используют газы, жидкость и газожидкостную смесь. Диапазон измеряемых температур от – 50°С до 600°С. Они используются для дистанционного (до 60м) измерения температур. Класс точности пример-
но 1,5. К их положительным качествам относятся: простота конструкции и об- служивания, возможность дистанционного измерения и автоматической записи показаний; к их недостаткам - небольшая точность измерений, значительная инерционность, сравнительно небольшое отклонение дистанционной передачи показаний.
Газовые манометрические термометры основаны на использовании зави- симости давления инертного газа (азота), который находится в герметично замкнутой термосистеме, от температуры. Термометры, заполненные азотом, обеспечивают измерение температуры до +600°C.
Величина изменения давления зависит от температуры следующим обра-
зом: |
|
|
|
P = P1 − P0 = P0β(t − t0 ), |
(1) |
||
где β = |
1 |
- термический коэффициент расширения, 1/°C; |
|
273.16 |
|
||
t - конечная температура, °C; t0 - начальная температура, °C;
Р0 - давление рабочего вещества при температуре t0 (20°C), Па.
В жидкостных манометрических термометрах вся система заполняется жидкостью под некоторым начальным давлением. Для заполнения обычно применяется ртуть (для температуры -30…+600°C) и ксилол (для температуры - 40…+200°C). Давление жидкости в зависимости от температуры можно пред-
ставить уравнением
P = (β μ) t , |
(2) |
где P - приращение давления в зависимости от температуры, Н/м2;
β- коэффициент объёмного расширения жидкости, 1/град;
μ- коэффициент сжимаемости жидкости, м2/Н;
t - приращение температуры, °C.
Из уравнений (1) и (2) видно, что изменение давления жидкости или газа при нагревании является линейной функцией температуры, и поэтому мано- метрические термометры имеют равномерную шкалу.
1.2. Измерение температуры термометрами сопротивления
В основе способа измерения температуры термометрами сопротивления (ТС) лежит свойство проводников изменять электрическое сопротивление под воздействием температуры.
Металлические ТС изготавливаются из меди и платины. Зависимость элек- трического сопротивления от температуры Т принимается линейной в виде RT = R0 (1+ a ×T ), где R0 – сопротивление проводника при начальной темпера-
туре; α – температурный коэффициент проводника. Металлические термомет- ры сопротивления из платины (ТСП), градуировки гр. 20, используются при длительном измерении в пределах от 0 до 650°C, а с градуировкой гр. 22 - от - 200 до +500°C. Термометры сопротивления медные (ТСМ) изготавливаются для измерения температур от -50 до +180°C и имеют градуировку 23 и 24.
2
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
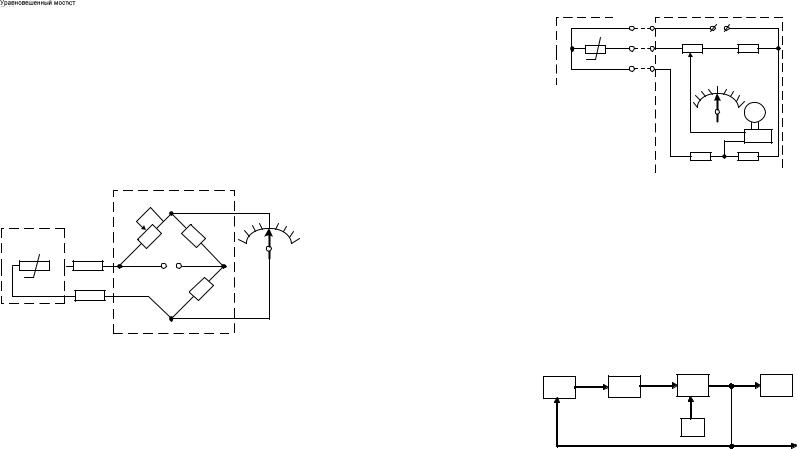
1.3. Уравновешенные мосты
В качестве вторичных приборов в комплекте с термометрами сопротивле- ния применяются преобразователи в сигнал 0…5мА или электрические равно- весные мосты, принцип действия которых изображается схемой, приведенной на рисунке 1.2.
Уравновешивающие мосты по способу представления информации бывают аналоговыми и цифровыми. Аналоговые преобразуют измеряемую величину в другую физическую величину, являющуюся аналогом измеряемой. Например, передвижение стрелки измерительного прибора относительно его шкалы. Циф- ровые мосты преобразуют измеряемую величину в сигнал, закодированный в цифровую форму.
Рис. 1.2. Схема уравновешенного моста
Равновесию моста (рис. 1.2) соответствует равенство
R1 ×(RT + 2RЛ ) = R2 × Rp .
В этом случае разность потенциалов между точками В и D соответствует нулю. При изменении температуры Т величина электрического сопротивления термометра RT изменится и мост разбалансируется. Равновесие моста обеспечи- вается изменением величины сопротивления реохорда Rp . Момент равновесия определяют по нулю шкалы прибора.
Автоматический уравновешенный аналоговый мост предназначен для не- прерывного измерения, записи и регистрирования температуры при работе в комплекте с соответствующим ему термометром сопротивления (рис. 1.3).
3
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Рис. 1.3. Автоматический уравновешенный мост
Мост состоит из собственно уравновешенного моста с реохордом Rp, усилителя У и реверсивного электродвигателя М. Электродвигатель кинематически соединён с ползунком реохорда Rp и стрелкой шкалы. Автоматический мост представляет собой астатическую систему слежения. Выходное напряжение моста усиливается и подает- ся на электродвигатель М. Вал двигателя одновременно передвигает ползунок рео- хорда Rp и стрелку, которая преобразует это передвижение в показания прибора.
В промышленных мостах используют трехпроводную систему соединения уравновешивающего моста с измеряемым термометром сопротивления RТ. Такая
система позволяет уменьшить влияние сопротивления соединительных проводов RЛ1, RЛ2, RЛ3 на показания прибора.
Структурная схема цифрового моста (ЦМ) показана на рис. 1.4.
МИЦ |
УС |
УУ |
код |
ЦОУ |
|
||||
|
|
Г |
|
код |
|
|
|
|
Рис. 1.4. Структурная схема цифрового моста
Неравновесное напряжение с мостовой измерительной цепи МИЦ подается на устройство сравнения УС, которое в процессе уравновешивания МИЦ на каждом такте от генератора импульсов Г выдает на управляющее устройство УУ информа- цию о знаке этого напряжения. Код, полученный УУ после уравновешивания, ото-
бражает значение измеряемой величины на цифровом отсчётном устройстве ЦОУ и может использоваться для введения итога в ЭВМ.
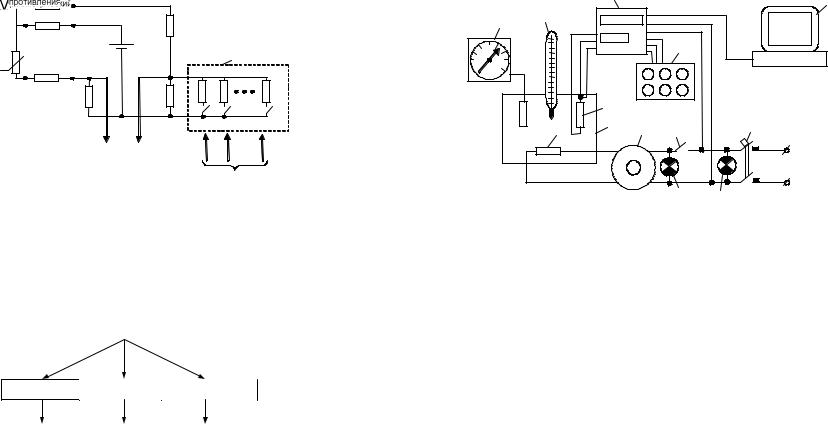
Схема МИЦ показана на рис. 1.5. Измеряемой величиной является температура Т, ее воспринимает RТ, который соединен с МИЦ трёхпроводной линией связи RЛ1, RЛ2, RЛ3. Каждому значению RТ соответствует определенная комбинация замкнутых ключей преобразователя кода в проводимость ПКП, при которой мост уравновеши- вается.
4
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
|
RЛ1 |
|
|
|
RЛ2 |
|
R2 |
|
|
+ |
|
|
|
|
Е |
Т |
RТ |
|
ПКП |
|
|
||
|
RЛ3 |
R4 |
R30 |
|
|
к УС
от УУ Рис. 1.5. Мостовая измерительная цепь цифрового моста
Весь процесс происходит за несколько тактов, которые задает генератор им- пульсов Г (рис. 1.4). В каждом такте на выходе УУ определяется код, который по- ступает на ПКП. При достижении равновесия МИЦ код отображается на ЦАП.
1.4. Характеристика лабораторной установки
Структура измерения температуры в данной лабораторной работе приведена на рис 1.5.
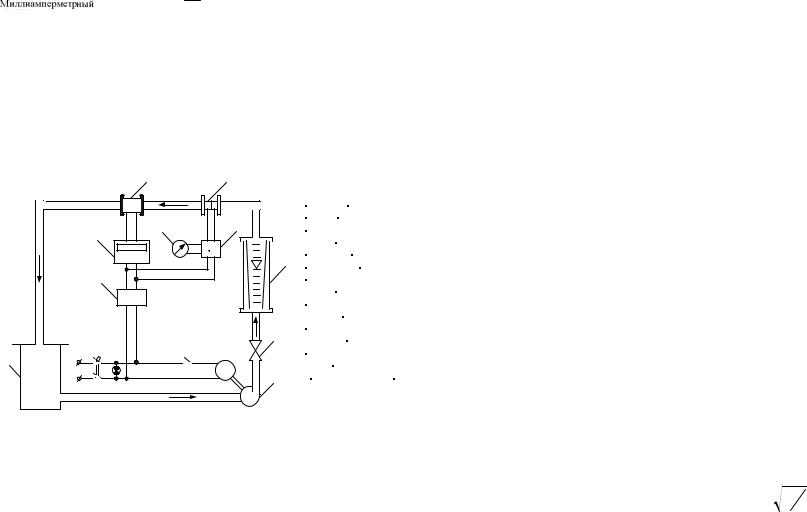
Рис 1.5 Общая схема лабораторной работы
Схема и приборы, предназначенные для исследования измерительных ком- плектов температуры, приведены на рис. 1.6.
Установка состоит из манометрического термометра 1; образцового ртут- ного термометра 2; комплекта, который включает в себя термометр сопротив- ления 3, цифровой измерительный прибор «Сосна 003» 4 и образцовый магазин сопротивлений 5; теплового шкафа 6 с электронагревателем 7, переключателем режимов 8 и включателем 9; автоматического выключателя 11 и сигнальных ламп 10, 12; персонального компьютера 13.
5
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
|
|
4 |
|
|
13 |
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
3 |
|
|
|
|
7 |
6 |
8 |
9 |
11 |
|
|
|
|||
|
|
|
|
|
220 В |
|
|
|
|
10 |
50 Гц |
|
|
|
|
12 |
|
|
|
|
|
|
|
|
Рис. 1.6. Схема лабораторной установки |
||||
1.5. Методика выполнения работы |
|
|
|||
1.Включить стенд переключателем 9.
2.Посмотреть на показания приборов манометрического термометра 1, ртутного термометра 2 (эталонный) и цифрового измерительного при- бора «Сосна 003», если их значения значительно больше комнатной температуры, то все в порядке, но рекомендуется открыть тепловой шкаф на несколько минут (чтобы охладить).
3.Подготовить таблицу 1.1 (см. далее).
4.Закрыть тепловой шкаф, регулятор температуры установить в положе- ние 0,6-0,7; внизу шкафа включить тумблер.
5.Каждые две минуты заносить в таблицу значения показаний ртутного термометра 2, манометрического термометра 1 и цифрового измери- тельного прибора «Сосна 003».
6.Измерения проводить до тех пор, пока показания ртутного термометра 2 не достигнут отметки 100°С.
7.Выключите тепловой шкаф .
8. Постройте графики AД = f (t); Aтc = f (t) ; Aмт = f (t).
9. Убедительная просьба приоткрыть тепловой шкаф (чтобы вашим последователям не пришлось выполнять п. 1).
Показание образцового ртутного термометра принимают за действитель- ное значение температуры в нагреваемом объекте. Полученные итоги измере- ний температуры каждым датчиком заносятся в табл. 1.1, и по ним рассчиты- ваются абсолютные и приведенные относительные погрешности комплектов, которые дополнительно исследуются.
Абсолютные погрешности измерительного прибора рассчитываются по формуле
6
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com

= Ai − AДi , |
(3) |
где Аі – показания соответствующего термометра; АДi – действительное значе- ние измеренной величины.
Относительной приведенной погрешностью называют выраженное в про- центах отношение погрешности к диапазону шкалы измерительного прибора N:
|
ф= |
|
×100%. |
|
|
|
|
(4) |
|||
|
N |
|
|
|
|||||||
Результаты эксперимента |
|
|
|
|
|
|
Таблица 1.1 |
||||
|
|
|
|
|
|
|
|
||||
Тип |
Показания |
Анач |
А1 |
А2 |
А3 |
А4 |
|
Аn |
|
||
термометров,оС |
|
|
|
|
|
|
|
|
|||
термометра |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Образцовый термометр (ртутный), °С |
|
|
|
|
|
|
|
|
|||
Термометр сопротивления, °С |
|
|
|
|
|
|
|
|
|||
Манометрический |
термометр |
|
|
|
|
|
|
|
|
||
(показания «Сосна 003», °С) |
|
|
|
|
|
|
|
|
|||
Время, мин |
|
|
|
0 |
t1 |
t2 |
t3 |
t4 |
|
tn |
|
Абсолютная погрешность (термометр |
|
|
|
|
|
|
|
|
|||
сопротивления), °С |
|
|
|
|
|
|
|
|
|
|
|
Относительная приведеная |
|
|
|
|
|
|
|
|
|||
погрешность (термометр |
|
|
|
|
|
|
|
|
|||
сопротивления), % |
|
|
|
|
|
|
|
|
|
|
|
Абсолютная погрешность |
|
|
|
|
|
|
|
|
|||
(манометрический термометр), °С |
|
|
|
|
|
|
|
|
|||
Относительная приведеная |
|
|
|
|
|
|
|
|
|||
погрешность (манометрический |
|
|
|
|
|
|
|
|
|||
термометр), % |
|
|
|
|
|
|
|
|
|
|
|
По величине максимальной приведенной погрешности измерительные приборы делятся на классы точности 0,05...4,00. Промышленные приборы в большинстве случаев выпускаются с классами точности 0,25; 0,5; 1,0; 1,5. На- пример, прибор точности 1,0 имеет максимальную приведенную погрешность
±1%. Класс точности прибора обычно показывают на его шкале. В лаборатор- ной установке использован измерительно-цифровой прибор «Сосна 003» с классом точности 0,25% при работе с термометрами сопротивления. Проверяе- мый прибор необходим для дальнейшей эксплуатации, когда величины по- грешности не превышают значения приведенной относительной погрешности.
В общем случае каждый элемент измерительного комплекта можно рас- сматривать как преобразователь энергии, на вход которого подается величина х, а на выходе снимается величина y. Основными характеристиками элемента яв- ляются следующие: y = f (x) – статическая характеристика; S = y / x –
статический коэффициент передачи или коэффициент чувствительности, кото- рый определяется по статической характеристике. Когда статическая характе- ристика нелинейная, то коэффициент чувствительности определяется как
7
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
S = y / x , где Dу и Dх – приращения соответственно выходной и входной ве- личин.
Впроцессе эксплуатации средства измерения меняют свои метрологиче- ские характеристики. Поэтому периодически все они должны подвергаться по- верке, при которой их показания сравниваются с показаниями более точного – образцового прибора (преобразователя).
Влабораторной работе необходимо выполнить поверку цифрового измери- тельного прибора «Сосна 003». С этой целью к нему присоединяется образцо- вый магазин сопротивлений, который имитирует образцовый термометр. Мага- зином задают значения сопротивлений термометра в соответствия с его градуи- ровочной таблицей (помещена на стенде). Показания прибора «Сосна 003», об- разцового магазина сопротивлений, а также данные градуировочной таблицы заносят в табл. 1.2.
Результаты поверки |
|
|
|
|
Таблица 1.2 |
|||||
|
|
|
|
|
|
|
||||
Номер |
|
|
1 |
2 |
3 |
4 |
5 |
|
|
n |
показания |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Температура |
по |
градуировочной |
|
|
|
|
|
|
|
|
таблице θ, °С |
|
|
|
|
|
|
|
|
|
|
Сопротивление |
по |
градуировочной |
|
|
|
|
|
|
|
|
таблице RТ, Ом |
|
|
|
|
|
|
|
|
|
|
Показания «Сосна 003» T, °С |
|
|
|
|
|
|
|
|
||
Абсолютная погрешность, °С |
|
|
|
|
|
|
|
|
||
Относительная приведеная |
|
|
|
|
|
|
|
|
||
погрешность, % |
|
|
|
|
|
|
|
|
|
|
По данным табл. 1.2 строятся зависимости θ = f(RТ), Т = f(RТ) по которым определяют значения S. По итогам поверки посредством формул (3) и (4) рас- считывают абсолютную и относительную приведенyю погрешности, по кото- рым надо сделать вывод о соответствии измерительного прибора «Сосна 003» своему классу точности 0,25.
Содержание отчета
1. Описание методов измерения и средств измерения температуры. 2. Схе- мы уравновешенных аналоговых и цифровых мостов. 3. Схема эксперимен- тальной установки и таблицы результатов исследований. 4. Графики AД = f (t);
Aтc = f (t) ; Aмт = f (t) , θ = f(RТ), Т = f(RТ). Значения Sк для зависимостей θ = f(RТ),
Т = f(RТ).
8
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
Лабораторная работа № 2
ИЗУЧЕНИЕ МЕТОДОВ И ПРИБОРОВ ДЛЯ ИЗМЕРЕНИЯ РАСХОДА
Цель работы – изучение методов и технических средств измерения расхо- да жидкости и газообразного вещества, оценка точности технических средств измерения расхода.
2.1. Общие сведения
Расход – это количество вещества, которое проходит через данное сечение в единицу времени. В состав каждого расходомера входит устройство, которое непосредственно измеряет расход и преобразует его в другую, более удобную для измерения и дистанционной передачи величину. В производстве чаще всего используются следующие виды расходомеров: переменного перепада давления (раздел 2.2.); постоянного перепада давления (раздел 2.3.); электромагнитные (индукционные) (раздел 2.5.); тахометрические (турбинные, шариковые), теп- ловые. Описанные приборы применяются в системах автоматического контроля и управления расходом жидкости или газа.
Каждый из перечисленных типов имеет характерные положительные ка- чества и недостатки. Поэтому при выборе расходомера необходимо учитывать требования к погрешности измерения, физические свойства веществ и условия эксплуатации.
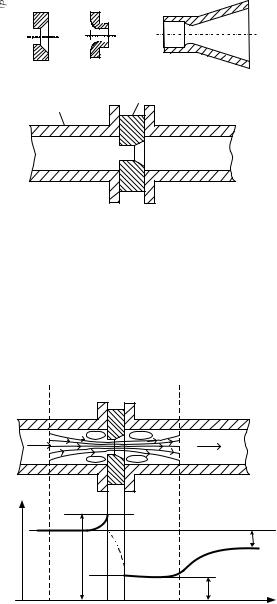
2.2. Расходомеры переменного перепада давления
Получили широкое распространение из-за простоты и надежности конст- рукции при достаточной точности. Измерение расхода методом переменного давления основано на изменении потенциальной энергии (статического давле- ния) вещества, которое протекает через сужение в трубопроводе. В качестве сужающих устройств, применяются нормальные диафрагмы и сопла, которые врезаются непосредственно в трубопровод (рис. 2.1).
а |
б |
в |
трубопровод сужающее устройство |
||
г
Рис. 2.1.Сужающие устройства: а – стандартная диафрагма; б – стандартное сопло; в – сопло Вентури; г – схема монтажа сужающего устройства
Сужение течения имеет место до сужающего устройства, и на некотором расстоянии за ним. Благодаря действию сил инерции, поток постепенно расши- ряется до полного сечения трубопровода (рис. 2.2). Перед диафрагмой и за ней образуются зоны с вихревым движением. Давление потока около стенки трубо- провода несколько возрастает из-за подпора перед диафрагмой и снижается до
минимума непосредственно за диафрагмой в наиболее узком сечении потока II-II. Далее по мере расширения потока давление течения около стенки опять повышается, но не достигает прежнего значения. Остаточная потеря давления
P объясняется потерями энергии на трение и завихрения.
|
Рис. 2.2. Характер течения и график распределения статического давления Р вдоль |
|
трубопровода при установке диафрагмы |
9 |
10 |
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2 |
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2 |
PDF created with pdfFactory Pro trial version www.pdffactory.com
Таким образом, перепад давления P на сужающем устройстве зависит от расхода вещества и может служить мерой этого расхода. Уравнение для объем-
ного расхода вещества в нормальных условиях имеет вид
Q = 0,0125×α ×ε × d 2 × 
 DP / ρ ,
DP / ρ ,
где a – коэффициент расхода; e – поправочный множитель на расширение изме- ряемой среды (для жидкостей e = 1); d – диаметр отверстия диафрагмы; Р – перепад давления на сужающем устройстве; r – плотность сужаемого вещества.
Для измерения перепада давления используют дифференциальные мано- метры.
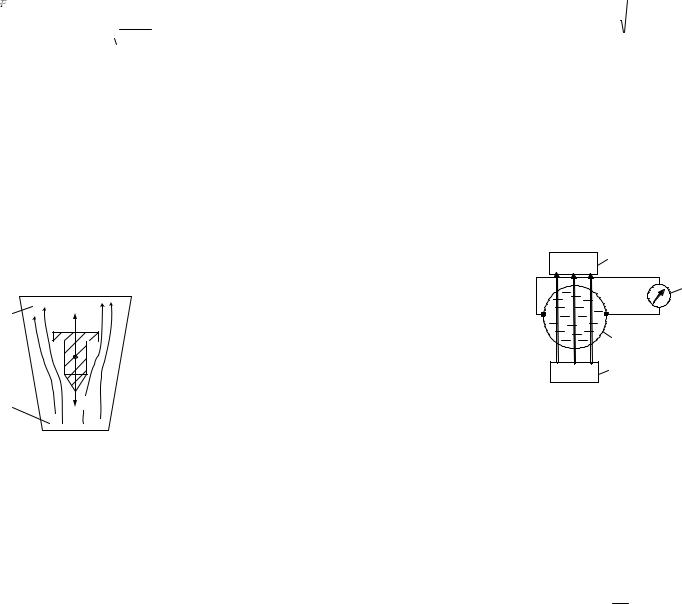
2.3. Расходомеры постоянного перепада давления
Наиболее распространенными приборами группы расходомеров постоянно- го давления являются ротаметры. Они состоят из конусной трубки, внутри кото- рой передвигается поплавок (рис. 2.3).
Проходя через ротаметр снизу вверх, жидкость или газ поднимает поплавок до тех пор, пока кольцевой зазор между телом поплавка и стенками конусной трубки не достигнет величины, при которой силы, действующие на поплавок, уравновешиваются. Поплавок устанавливается на той или иной высоте в зависи- мости от величины расхода.
Рис. 2.3. Схема ротаметра с конусной трубкой
Условие равновесия: поплавок уравновешен в том случае, когда воздейст- вие на него внешних сил скомпенсировано:
FТ + Р2S = P1S + FТр или DP = P - P = |
FT - FТр |
, |
|
|
|||
1 |
2 |
S |
|
|
|
||
где FТ – сила тяжести; Р2 – среднее давление течения на поплавок сверху; Р1 – среднее давление течения на поплавок снизу; S – площадь наибольшего попе- речного сечения поплавка; FТр – сила трения течения о поплавок.
Если принять, что при всех расходах сила трения FТр остается постоянной, то и разность давлений на поплавок Р = P1 – Р2 = const будет постоянной, т. е. перепад давления будет постоянным, вследствие чего ротаметр и является при- бором постоянного перепада давления.
11
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Уравнение расхода ротаметра имеет вид
Q = α × Sк |
|
2× DP |
|
, |
|
ρ |
|||||
|
|
|
|
где a – коэффициент расхода; Sк – площадь кольцевого отверстия, которое об- разовано конусной трубкой и верхней частью поплавка.
Поскольку величины под корнем практически можно считать постоянны- ми, то их заменяем коэффициентам K, тогда
Q = α × Sк × K .
Эта зависимость линейная и поэтому шкала ротаметра будет равномерной. Ротаметрами можно измерять небольшие расходы, потери давления в них незначительны и не зависят от величины расхода, но вещество должно прохо-
дить через прибор только снизу вверх.
2.4. Электромагнитные расходомеры
Принцип действия электромагнитных расходомеров основан на измерении электродвижущей силы (ЭДС), которая индуцирована в течении электропро- водной жидкости под воздействием внешнего магнитного поля (рис. 2.4).
S |
2 |
|
4 |
В |
1 |
|
|
N |
3 |
Рис. 2.4. Схема электромагнитного расходомера
Трубопровод 1 с жидкостью находится между полюсами 2 и 3 магнита перпендикулярно к направлению силовых линий магнитного поля. Трубопро- вод расходомера выполняется из немагнитного материала. В стенке трубопро- вода диаметрально противоположно установлены измерительные электроды.
Под действием магнитного поля ионы, которые находятся в жидкости, пе- редвигаются и отдают свои заряды измерительным электродам. На электродах образовывается ЭДС Е, пропорциональная скорости течения жидкости, которая измеряется прибором 4. Величина этой ЭДС в случае постоянного магнитного
поля равна
E = -B × d × u,
где В – магнитная индукция между полюсами магнита; d – внутренний диаметр трубопровода (длина проводника); u – средняя скорость течения жидкости.
Выразив скорость через объемный расход Q, получим
E = - 4рBd ×Q .
12
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
В большинстве индукционных расходомеров используют переменное маг- нитное поле, которое меняется во времени t с частотой f. Тогда ЭДС определя-
ется как
E = 4pBd ×Q × sin 2pf × t.
При переменном магнитном поле электромагнитные процессы меньше влияют на показания прибора, чем при постоянном.
2.5. Характеристика установки
Электропитание стенда включается автоматическим выключателем QF, а электродвигателя M насоса – переключателем S.
Из ёмкости 1 вода центробежным насосом 2 подается в трубопровод, на котором последовательно установлены регулировочный вентиль 3 и устройства измерения расхода: ротаметр 4 (раздел 2.3), диафрагма 5 (раздел 2.2) и чувстви- тельный элемент 6 индукционного расходомера (раздел 2.4) (рис. 2.5).
Рис. 2.5. Схема лабораторной установки |
Расход воды через трубопровод регулируется изменением степени откры- тия вентиля 3.
Величина расхода по ротаметру 4 определяется положением поплавка от- носительно шкалы.
Перепад давления на сужающем устройстве (диафрагме) 5 определяется дифференциальным манометром 7 «САПФИР 22 ДД» (∆Р = 20 кПа). Он преоб-
разовывает перепад в унифицированный сигнал постоянного тока величиной 0¸5 мА, который измеряется миллиамперметром 10.
При прохождении потока через индукционный расходомер 6 «PROMAG 53 H» (класс точности 0,2%) величина расхода определяется по цифровому ин-
13
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
дикатору 8. Открывая вентиль 3, устанавливают 9 (девять) значений расхода
жидкости по ротаметру и определяют соответствующие показания цифрового отсчетного прибора 9.
Результаты измерений записывают в таблицу.
По результатам эксперимента выполняются следующие расчеты и графи- ческая работа.
Порядок выполнения работы
1.Рассмотрение схемы и принципа действия лабораторной обстановки.
2.Подготовка лабораторной установки к проведению измерений.
2.1.Включить тумблер питания лабораторной установки.
2.2.Включить насос.
2.3.С помощью вентиля 3 установить на 2-3 минуты максимальный рас- ход для заполнения системы водой.
3.Проведение измерений.
3.1.С помощью вентиля 3 установить расход, при котором поплавок ро- таметра находится около нулевой отметки шкалы.
3.2.Записать в таблицу показания электромагнитного расходомера и из- мерителя «Сосна».
3.3.Установить последовательно расход, при котором поплавок ротамет- ра находится около отметок 10, 20, 30, 40, 50, 60, 70, 80 и записать в таблицу показания электромагнитного расходомера и измерителя «Со- сна» в таблицу 1.
|
|
|
Результаты эксперимента |
|
Таблица 1 |
|||||
|
|
|
|
|
|
|||||
Показания |
Показания «Сосна» |
Показания |
|
Приведенная |
|
|||||
«Promag 53» |
ротаметра |
|
погрешность |
|
||||||
|
|
|
|
|
||||||
Q0, |
Q0, |
|
P, |
Qд |
|
Qр |
|
рота- |
диафраг- |
|
дел. |
дел. |
|
метра |
мы |
|
|||||
л/мин |
м3/ч |
кг/м2 |
м3/ч |
м3/ч |
|
|
||||
|
|
|
|
|
|
|
|
γр |
γд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.4.Закрыть вентиль, выключить насос, отключить лабораторную установку.
4.Обработка результатов измерений и построение графиков зависимостей.
4.1.Определить расход, измеренный диафрагмой, по формулам:
QД = 0,0125a×e × d 2  DP r ;
DP r ;
DP = [дел.]× DPmax , мм. вод. ст. ,
[дел.]max
где Pmax – максимальный перепад давлений – 320 мм. вод. ст. [дел.]max – верхнее значение шкалы прибора, равное 1000
14
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com

α – коэффициент расхода – 0,6 ε - поправочный множитель на расширение среды – 1
d – диаметр отверстия диафрагмы – 10 мм (подставлять в формулу в мм) ρ – плотность среды – 1000 кг/м3
4.3. Построить графики статических характеристик диафрагменного расходо-
мера А= f( P), I = f(Q) и P = f(Q).
4.4.Определить расход, измеренный ротаметром, по прилагаемому тарировоч- ному графику.
4.5.Определить коэффициент чувствительности (передачи) ротаметра K = N/ Q для трёх точек графика.
4.6.Для диаграммы определить коэффициент A = Q
 P .
P .
Содержание отчета
1.Название и цель лабораторной работы.
2.Краткое описание методов измерения расхода.
3.Схема лабораторного стенда.
4.Таблица результатов эксперимента.
5. |
Статические характеристики N = f (Q) , I = f (Q) и A = f ( P). Расчет- |
ные значения коэффициентов чувствительности. |
|
6. |
Выводы. |
15
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Лабораторная работа № 3 ИССЛЕДОВАНИЕ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
МЕХАНИЧЕСКИХ ВЕЛИЧИН
Цель работы – исследование характеристик и принципов действия изме- рительных преобразователи угловых и линейных перемещений.
3.1. Общие сведения
Измерительные преобразователи (ИП) механических величин применя-
ются как самостоятельные приспособления для контроля положения объектов и их частей в процессе движения, так и преобразовательные элементы в других устройствах для измерения линейных и угловых перемещений.
ИП механических величин можно разделить на дискретные и непрерыв- ные. Дискретные ИП используют для контроля конечных или промежуточных положений подвижных объектов или их частей. Непрерывные ИП использу- ют для непрерывного контроля перемещений. Среди них различают ИП линей- ного (поступательного) и углового (вращательного) перемещения.
Указанные ИП имеют различные статические характеристики. Статическая характеристика определяет функциональную зависимость выходной ве- личины Y от входной Х в установленном режиме, т. е. после истечения времени, когда изменения информации, массы, энергии в звене прекратились. Аналити- чески статическую характеристику можно обозначить как Y = f (X ) .
Взависимости от вида функции f, ИП делятся на линейные и нелинейные.
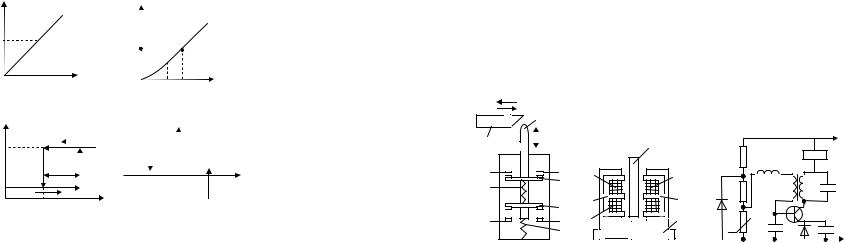
Клинейным относятся ИП, в которых статическая характеристика имеет вид Y = KX (рис. 3.1, а). Это уравнения прямой линии, которая выходит из начала координат. Величину K называют коэффициентом передачи ИП. В метрологии эту величину называют коэффициентом чувствительности. При нелинейной ха- рактеристике коэффициент K меняется в значительных пределах и определяет-
ся как K = Y / X для соответствующего рабочего пункта А (рис. 3.1, б).
Для каждого преобразователя существует порог чувствительности 0 −
это минимальное значение входной величины, которая может быть измеренная с помощью данного преобразователя. Максимальное значение входной величи- ны, которое можно измерять с помощью преобразователя с нормированной по- грешность, называется границей преобразования. Отношения границы преобра- зования X м к порогу чувствительности называют диапазоном измерения
Dв = Xм / 0 .
16
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
у |
|
|
у |
|
|
|
|
у1 |
|
|
у уА |
А |
|
|
|
|
|
|
|
|
хА |
|
|
х1 |
х |
|
|
|
х |
х |
|
а |
|
|
|
|
б |
|
|
у |
|
|
|
|
у |
|
|
уmax |
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уmin |
|
|
-хотп |
|
|
хср |
х |
|
|
|
|
|
|
|
|
хотп |
хср |
х |
|
|
|
||
в |
|
|
|
|
г |
|
|
Рис. 3.1. Статические характеристики измерительных преобразователей
Дискретные ИП имеют, как правило, релейную статическую характери- стику (рис. 3.1, в, г). У них при некотором значении плавно изменяемой входя- щей величины Х происходит резкое, скачкообразно изменение выходной вели- чины Y. Причем из-за наличия в дискретных ИП зоны неоднозначности наблю- дается неоднозначность хода характеристики. При непрерывном увеличении и уменьшении входной величины Х скачкообразно изменение выходного Y про- исходит при разных значениях Х.
В первом случае при Х = Хср (срабатывания) Y скачком меняется от Y = Ymin до Y = Ymax . Во втором случае при Х = Хотп (отпускания) Y меняется от Y = Ymax до Y = Ymin . Такие статические характеристики называются релейными.
Они могут быть нереверсивными, если при уменьшении или увеличении Х ве- личина Y не меняет знак или направление (рис. 3.1, в), и реверсивными, в кото- рых при изменении направления Х меняется знак Y (рис. 3.1, г). Для статиче-
ских характеристик релейной ВП можно определить коэффициент возврата Kв = Xотп / Xср и зону возврата в .
К элементам с релейной характеристикой относятся различные контакт- ные и бесконтактные конечные выключатели, электромагнитные и пневматиче- ские реле, контактные измерители уровня, температуры и др.
3.2. Дискретные преобразователи механических перемещений
Дискретные ИП механических перемещений используют для получения управляющих сигналов или команд. Их можно разделить по назначению на ко- мандные и размерные, по конструкции − на контактные и бесконтактные.
17
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Командные предназначены для получения руководящих команд в опре- деленных точках пути перемещения элемента станка или какого-либо вспомо-
гательного устройства и называются путевые или конечными переключателями
(рис. 3.2).
Размерные преобразователи измеряют размеры деталей, которые обраба- тываются, или величины перемещений рабочих органов.
|
1 |
|
|
|
|
|
|
|
6 |
|
|
3 |
|
|
|
|
|
|
|
|
|
R1 |
Wоос |
|
|
|
5 |
2 |
Wпос |
Wоос |
|
|
|
|
|
2 |
2 |
R2 |
Wпос |
Wк |
Ск |
|||
|
|
|||||||
|
3 |
VD1 |
|
|
|
|||
|
|
1 |
|
VT |
|
|||
|
|
Wк |
R3 |
|
|
|||
|
4 |
С1 |
|
С2 |
||||
|
|
|
|
|
||||
|
а |
|
б |
|
в |
|
|
|
|
|
Рис. 3.2. Командные ИП перемещений |
|
|
||||
Вконтактных (рис. 3.2, а) при нажатии руководящего упора 6 на привод- ное приспособление (шток) 1 выключателя подвижные контакты мостикового типа 2 и 3 опускаются вниз. При этом замкнутые контакты размыкаются, а ра- зомкнутые замыкаются. В пазу штока между мостиками находится пружина 5, которая создает контактный натиск. Вторая пружина 4 обеспечивает самовоз-
врат коммутирующего устройства в исходное положение после отпускания упора.
Вбесконтактных выключателях (рис. 3.2, б) управляющий сигнал выра-
батывается в результате изменения параметров выходных цепей электрической схемы в результате изменения индуктивной связи между обмотками при введе- нии между ними экрана.
Вкорпусе выключателя 1 (рис. 3.2, б) по обе стороны щели расположены два ферритовых сердечника 2. На одном из них находятся контурная обмотка Wк и обмотка положительной обратной связи Wпос , а на другом – Wоос обмотка
отрицательной обратной связи (ООС).
На рис. 3.2, в показана схема транзисторного генератора. Колебательный контур WкCк включен в цепь коллектора транзистора VT. В начальном состоя-
нии колебания в генераторе не возникают из-за сильной ООС, которая осуще- ствляется катушкой Wоос . При введении в щель корпуса металлического экрана
3, резко уменьшается индуктивная связь между Wк и Wоос . В результате в кон-
туре возникают незатухающие колебания с частотой несколько килогерц. В коллекторной цепи появится большой выходной ток. После прохождения экра- на ООС восстанавливается и колебания прекращаются. Для стабилизации кол-
18
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
лекторного тока при колебаниях температуры применены нелинейный делитель напряжения на резисторах R1 и R2 и терморезисторе R3. Стабилитрон VD1 осу- ществляет стабилизацию напряжения питания. Диод VD2 стабилизирующий ток коллектора.
При помощи путевых и конечных выключателей автоматизируется работа технологических линий. По истечении одной технологической операции, вы- полняемой неким механизмом, срабатывает дискретный датчик, выключаются одни электрические цепи и включаются другие, приводящие в действие меха- низмы, выполняющие следующие операции.
3.3. Непрерывные измерительные преобразователи перемещений
Наиболее распространенными непрекращающимися ИП механических перемещений являются реостатные, электромагнитные и фотоэлектрические.
Реостатным ИП называют переменный резистор, подвижный контакт ко-
торого перемещается в соответствии с механическим перемещением детали или рабочего органа механизма. Натуральная входная величина реостатного ИП – перемещение, выходная – активное сопротивление.
Статическая характеристика преобразователя есть зависимость выходно- го сопротивления от перемещения контакта, т. е. R = f (x). Реостаты могут ра-
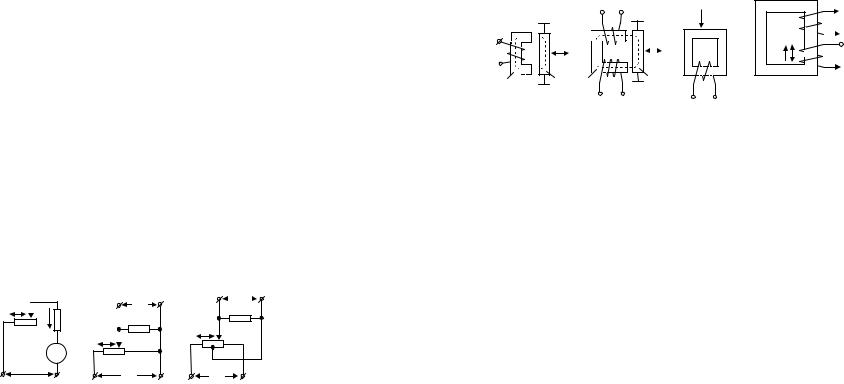
ботать на постоянном и переменного токе низкой частоты и включаются в электрический цепь последовательно с нагрузкой Rн, как реостат (рис. 3.3, а), или параллельно нагрузке, как делитель напряжения (рис. 3.3, б). Статическая характеристика для схемы рис. 3.3, а записывается в виде Iн = f (x) , для схем
рис. 3.3, б, в – Uн = f (x). Если преобразование необходимо осуществлять с уче- том направления перемещения, тогда используют схему рис. 3.3, в.
х |
|
|
|
|
Uн |
Uн |
|
|
|
|
|
||
|
|
Rн |
|
|
|
|
|
|
|
|
х |
Rн |
|
|
|
|
|
х |
||
|
|
|
|
Rн |
|
|
|
|
PA |
|
|
|
|
|
|
|
|
|
|
|
|
Uп |
|
|
|
Uп |
Uп |
|
|
|
|
|
Рис. 3.3. Схемы включения реостатных ИП
Электромагнитные ИП (ЭИП) реализуют следующие основные разновид- ности функций преобразования:
L = |
W 2 |
; M = |
W ×W |
; e = −W |
dF |
|
|
|
1 2 |
|
, |
||||
Zм |
dt |
||||||
|
|
Zм |
2 |
|
где L – индуктивность обмотки; W1, W2 – количество витков обмоток; M – взаимная индуктивность обмоток; Zм = Rс + Rз – магнитное сопротивление маг- нитной цепи преобразователя; Rс – магнитное сопротивление стального стерж-
19
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
ня ИП; Rз – сопротивление воздушного зазора; е – электродвижущая сила (ЭДС); dФ /dt – скорость изменения магнитного потока.
Если менять Rз, перемещая на величину Х подвижный стержень – якорь 1 относительно неподвижного магнитопровода 2, то будет меняться значение L (рис. 3.4, а) или М (рис. 3.4, б). Первый преобразователь называется индуктив- ным, а второй - трансформаторным.
|
|
F(x) |
|
W1 |
|
|
|
|
|
W |
x |
x |
x |
|
|
|
W2 |
||
|
|
|
|
|
|
W1 |
W |
|
|
а |
б |
в |
|
г |
|
|
Рис. 3.4. Схемы ЭИП |
|
|
Если к магнитопроводу ИП приложить сжимающие или скручивающие усилия, то произойдет изменение магнитного сопротивления Zм стального стержня (рис. 3.4, в). Это вызывает изменение L или М обмоток. Такие ЭИП на- зывают магнитоупругими. Если в ЭИП с двумя обмотки перемещать вдоль стержня одну обмотку W2 относительно другой W1, то в ней появится ЭДС из-за изменения магнитного потока. Преобразователи называют индукционные (рис. 3.4, г).
В практике измерений перемещений наибольшее распространение полу-
чили дифференциально-трансформаторные преобразователи (ДТП) (рис. 3.5).
ДТП используется при измерении расхода, давления, уровня и других па- раметров, которые могут быть преобразованы в перемещение. Они применяют- ся в системах дистанционной передачи показаний.
На рис. 3.5 показан ДПТ и электрическая схема соединений его обмоток. На каркасе 1 расположены первичная обмотка 2, равномерно намотанная по его длине, с числом витков W1, а также две выходные обмотки 3 и 4 (W2 и W3), ко- торые соединены между собой по дифференциальной схеме. На первичную об- мотку подается напряжение питания переменного тока. В выходных обмотках W2 и W3 индуцируется ЭДС, величина которой определяется током первичной обмотки и величиной взаимоиндукции М2 и М3 между выходными W2 и W3 и первичной обмоткой. При среднем положении плунжера 5 относительно обмо- ток W2 и W3 М2 = М3. При помещении плунжера вверх от среднего положения величина М2 возрастает, а М3 - уменьшается, при помещении плунжера вниз - наоборот.
20
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com