

Автоматика(лабораторные работы) v1.5
.2.pdf4 |
3 2 1 |
x |
|
|
W2 |
x |
~U |
~U W1 |
|
|
W3 |
5
Рис. 3.5. Дифференциально-трансформаторный преобразователь
Магнитные потоки, которые индуцируются в обмотках W2 и W3, направ- лены встречно, поэтому полная взаимная индуктивность М при среднем поло- жении плунжера M = M2 − M3 = 0 .
При перемещении плунжера взаимная индуктивность меняется следую- щим образом:
M = Mм × llм × e− jϕ
где Mм - значение модуля взаимной индуктивности, которое соответству- ет максимальному перемещению плунжера lм ; l - величина хода плунжера ар-
гумент вектора взаимоиндукции.
ЭДС на выходе преобразователя будет
E = ω × I × M ,
где ω = 2× p × f , f - частота тока обмотки W1; I - ток первичной обмотки.
В фотоэлектрических преобразователях (ФП) механическое перемеще- ние преобразуется в электрические сигналы, содержащие информацию о вели- чине и направлении перемещения (рис. 3.6).
Оптическая |
Электронная |
|
|
+15В |
|||
часть |
|
|
|
часть |
|
|
-15В |
|
3 |
4 |
|
|
|
||
2 |
5 |
|
|
|
ОБЩИЙ |
||
|
|
|
|
|
|||
|
|
|
УН1 |
ФП1 |
УМ1 |
ИН1 |
ОСН |
|
|
|
6 |
|
|
|
ОСН |
|
|
|
|
|
|
|
|
|
|
|
УН2 |
ФП2 |
УМ2 |
ИН2 |
СМ |
|
|
|
|
|
|
|
СМ |
1 |
|
|
УН3 |
ФП3 |
УМ3 |
ИН3 |
Н |
|
|
|
|
||||
|
|
|
5 |
|
|
|
Н |
|
|
Рис. 3.6. Оптическая система и схема преобразователя |
|
||||
21
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
ФП состоит из механической, оптической и электронной частей. Механи-
ческая часть обеспечивает жесткую связь объекта измерения с чувствительным элементом ФП.
Оптическая система проводит световой поток от светодиода 1 через лин- зы 2, растровую индикаторную пластину 3 и растровые диск 4 на фотодиоды 5
и6. На индикаторной пластине 3 растры расположены в двух секторах и сме- щены один относительно другого на 90 электрических градусов. Два фотодиода установлены под каждым сектором растровой пластины.
При вращении растрового диска 4 меняется световой поток, и фотодиоды будут выдавать первичные сигналы ОСН (основной) и СМ (смещен) вида sin ф0
иcos ф0 соответственно, где ф0 - относительное смещение растров. Фотодиод в
центре растрового диска выдает третий сигнал начала отсчета (нулевой сигнал)
Н.
Первичные сигналы всех трех каналов поступают на усилители напряже- ния УН, а потом на формирователи ФП, которые преобразуют синусоидальные сигналы в прямоугольные импульсы. После формирователей сигналы переда- ются на усилитель мощности УМ и инверторы ИН. В результате на выходе об-
разуется шесть сигналов - три основные (ОСН, СМ, Н) и три инверсные ( ОСН ,
СМ , Н ). С помощью этих сигналов определяется начальная точка отсчета пе- редвижения, пройденный угол и направление вращения датчика.
3.4.Методика выполнения работы
1)Включить компьютер.
2)Включить стенд выключателя SF. Загорится сигнальных лампа HL.
3)Загрузить МХОРС Configuration.
4)Нажать пиктограмму старт МХОРС Configuration («зеленый треуголь-
ник»).
5)Загрузить Microsoft Excel.
6)Открыть файл лаб.3 (С: Melsec / лабЗ)
7)Включить соединение, выбрав в меню MXSheet пункт Start Communication или используя пиктограмму Start Communication в инструмен- тальной линейке (5-я пиктограмма)
8)Всплывает окно MXSheet с вопросом. Communication will commence. Is it OK? Нажать клавишу «ДА».
9)Установить переключатель SA в положение 1. Штурвалом (на левой стенке стенда) переместить указатель датчик линейного перемещения В1 на отметку 21,2 см и нажать кнопку SB1 «Запись».
10)Перемещать указатель датчик линейных перемещений В1 через 1 мм до отметки 17,8 см, нажимая кнопку SB1 Запись на каждой отметке. Записать полученные данные для построения графика «число перемещение» N = f (l)
11)По окончании опыта переставить переключатель SA в положение 2.
12)Перемещать штурвалом указатель датчик В1 влево до срабатывания бесконтактного конечного выключателя SQ2. При этом загорится цифра 6 на
22
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
индикатор входов контроллера, а в столб «Срабат БВК» появится значение, ко- торое надо записать.
13)Переместить указатель В1 вправо до выключения SQ2. В столб «От- пускание БВК» появится число, а на индикатор контроллеры погаснет цифра 6. Значение записать.
14)Перемещать указатель SQ2 влево до срабатывания электромагнита YA, который зафиксирует упор в рабочем положении.
15)После срабатывания электромагнита перемещать указатель датчик В1 вправо до срабатывания конечного выключателя SQL При этом загорится циф- ра 7 на панели контролера, а в столб «Срабатыв. KB »появится число.
16)Перемещать указатель датчик В1 влево до SQ1. В столб «Отпускание KB» появится значение, а на индикатор контроллеры погаснет цифра 7. Значе- ние срабатывания записать.
17)Перелистать указатель датчик В1 на отметку 21,2 мм.
18)Переключатель SA установить в положение 3.
19)Установить реостатный преобразователей угловых перемещений ВЗ в положение «0» и нажать кнопку SB1 «Записать результат измерения». В столб «датчик» угла поворота появится значение.
20)Изменяя угол поворота ВЗ через 50 единиц большого Лимбу в преде- лах от 0 до 10 единиц малого Лимбу, каждый раз фиксируя положение датчик кнопкой SB1. В колонке «датчик угла поворота» будут зафиксированы 20 зна- чений, которые записать.
21)Переключатель SA остается в положении 3. Установить Лимбу преоб- разователей В2 на нулевую отметку. Нажать кнопку SB2 «Сброс счетчика». Поворачивая лимб В2 по часовой стрелке, последовательно обойти N делений (по заданию преподавателя) и определить при этом количество импульсов n преобразователя. Данные записать. По данным определить угол поворота лим- ба. Выполнить несколько опытов.
22)В меню «MX Sheet» выбрать пункт «End Communication».
23)Выйти из Excel. В окне «MX Configuration» нажать пиктограмму «красный квадрат». Закрыть окно.
24)Установить переключатель SA в положение 1. Выключить стенд. Вы- ключить компьютер.
Содержание отчета 1. Описание принципов работы ИП. 2. Таблицы экспериментальных дан-
ных. 3. Графики, и необходимые вычисления коэффициентов чувствительности для исследования преобразователя. 4. Выводы.
23
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Лабораторная работа № 4
ИССЛЕДОВАНИЕ ДВУХПОЗИЦИОННОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Цель работы – изучение структуры и динамических характеристик систем автоматического управления (САУ) с двухпозиционным регулятором.
4.1. Общие сведения
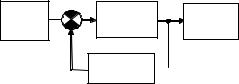
Система автоматического регулирования состоит из объекта управления (ОУ), в котором происходит автоматизируемый процесс, и внешнего в отноше- ниях к объекту устройства, который называют автоматическим регулятором (АР) или просто регулятором (рис. 4.1).
Источник |
РО |
Обьект |
Потребитель |
энергии |
|
управления |
(нагрузка) |
или в-ва |
|
|
|
Автоматический регулятор 
Рис. 4.1. Схема системы автоматического регулирования
От источника питания к объекту управления подводится энергия (вещество), которая в объекте изменяется и в виде, удобном для использования, подается по- требителю. Поступление энергии или вещества (регулируемое пространство) можно изменять системой управления (СУ).
Когда приток регулируемого окружения в ОУ равен его расходу, то система находится в равновесии, а регулируемая величина, которая характеризует процесс в ОУ, сохраняет постоянное значение в течение времени.
При нарушении равновесия между притоком и расходом энергии (вещест- вом) в ОУ, регулируемая величина начнет меняться. Для восстановления равнове- сия необходимо или изменить приток энергии перестановкой регулирующего ор- гана (РО), или изменить ее побочный расход.
Для автоматизации этой операции к регулирующему органу необходимо присоединить автоматический регулятор (рис. 4.1).
Регулятор, у которого регулирующее воздействие равно одной из двух край- них величин, называется двухпозиционным. При этом СУ устанавливается в од- но из двух положений (включено-выключено; больше-меньше; открытый- закрытый и т. д.).
Чтобы понять работу позиционных регуляторов, рассмотрим следующий пример. В ОУ (рис. 4.2), которым является емкость 1, по трубе 2 подается жид- кость, а по трубе 10 она подаётся к потребителю. На поверхности жидкости пла- вает поплавок 6, который штоком 5 соединен с подвижным контактом 7. При пе- редвижении последний может замыкаться с неподвижными контактами 8 и 9. При
24
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
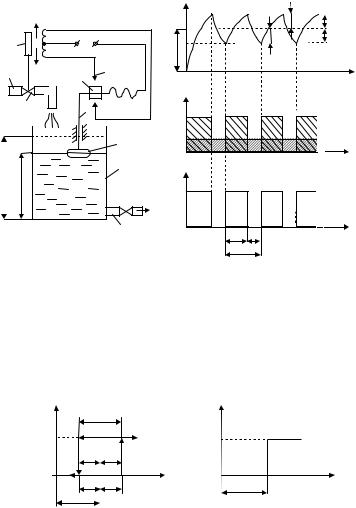
поднятии уровня жидкости выше желаемого, контакты 7 и 8 замкнутся, и под на- пряжением будет нижняя обмотка В исполнительного механизма 4. Регулирую- щий орган 3 закрывается полностью и остается в таком состоянии. При снижении уровня ниже желаемого значения, контакт 7 замкнется с контактом 9, и под на- пряжением будет обмотка А исполнительного механизма 4, регулирующий орган 3 откроется и останется в таком состоянии.
L
А |
L+ |
+ н/2 |
|
4 |
|
U |
|
|
Lж |
|
|
L- |
- |
н/2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
В |
7 |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
t |
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Q |
|
|
||
|
3 |
|
|
|
|
м3/c |
|
|
|
|
|
|
Qп |
5 |
9 |
|
|
|
|
|
|
||
|
|
Qп |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
Qр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
1 |
μ |
|
|
в |
|
|
Lж |
|
|
|
|
|
|
|
|
|
||
L |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
μmax |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qр |
|
|
|
|
|
|
|
а |
|
|
10 |
μmin |
|
T1 |
T2 |
|
t |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
г |
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.2. Переходной процесс СА с двухпозиционным регулятором
В рассмотренном примере позиционное регулирование осуществляется кон- тактами 7, 8 и 9. Входной величиной надо считать отклонение уровня жидкости L от желаемого значения Lж : X = (Lж - L), которое через поплавок 6 и шток 5 пере-
дается на контакт 7. Выходной величиной служит напряжение в обмотке А, что соответствует mmax, и в обмотке В, что соответствует mmin. Статическая характери- стика двухпозиционного регулятора показана на рис. 4.3. В зависимости от регу- лируемой переменной L показано положение регулирующего органа (клапана) m.
μ |
μ |
|
|
|
н |
|
|
|
|
|
|
μmax |
3 |
|
|
|
2 |
μmax |
|
|
|
− |
н |
+ |
н |
|
|
|
|||
|
|
|
|
|
|||||
|
2 |
|
2 |
|
|
|
|
|
|
μmin |
4 |
|
|
|
1 |
μmin |
|
|
|
- |
L + |
L |
L |
L |
L |
||||
|
|||||||||
|
Lж |
|
|
|
|
ж |
|||
|
|
|
|
|
|
|
|
||
а |
б |
Рис. 4.3. Статические характеристики двухпозиционных регуляторов: а – с зоной возврата; б –без зоны нечувствительности
25
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Из рисунка видно, что в точках 2 и 3 клапан полностью открыт (mmax), а в точках 1 и 4 он полностью закрыт (mmin). Отсюда следует, что в границах зоны возврата Dн никаких изменений в контактах 7, 8 и 9 и в положении исполни- тельного механизма не происходит. Это облегчает работу механических уст- ройств и во многих случаях устраняет режим непрерывных колебаний.
Такой закон регулирования изображён на рис. 4.3, а установкой зазоров между контактами 7, 8 и 7, 9 на рис 4.2, а. В этом случае зазор между контакта- ми 8 и 9 соответствует величине Dн. Поведение такой системы в динамике бу- дет существенно зависеть от конструкции исполнительного механизма 4 и ре- гулирующего органа 3.
Прикладной характер переходного процесса показан на рис. 4.2. Процесс изменения уровня (рис. 4.2, б) носит колебательный характер. Каждый раз, ко- гда уровень достигает значения (Lж -Dн/2), регулирующий орган полностью от- крывается. В итоге приток Qп жидкости на входе в емкость будет максималь- ным, больше за расход. Уровень увеличивается. При достижении уровня значе- ния L= Lж + Dн/2 замкнутся контакты 7, 8 и клапан закроется, Qп =0 (рис. 4.2, в). Нижний график рис. 4.2, г отображает положение клапана 3. Когда он открыт, то жидкость поступает в объект, при закрытом клапане жидкость в объект не поступает. Таким образом, регулирующий орган при непрерывном изменении уровня может занимать только два устойчивых положения: открытый - закры- тый.
По графику рис. 4.2, г можно найти время включения Т1, время выключе- ния Т2 и период регулирования Т = Т1 + Т2.
По графику рис. 4.2, б определяют амплитуду положительного DL+ и ам- плитуду отрицательного DL– отклонений уровня от желаемого значения Lж (рис. 4.2, б).
График на рис. 4.2, в отображает состояние притока Qп и расхода жидко- сти Qр в процессе двухпозиционного регулирования.
Закон регулирования с зоной нечувствительности Dн имеет вид
|
ìμ |
max |
при |
|
L ³ L |
+ Dн , |
|
|
||||
|
ï |
|
|
|
|
ж |
2 |
|
|
|
||
|
ï |
|
|
|
|
Dн |
|
|
Dн |
|
||
μ = |
ï |
|
0 при |
L - |
£ L £ L + |
, |
||||||
í |
|
|
|
|||||||||
|
|
|
|
ж |
2 |
|
|
ж |
2 |
|
||
|
ï |
|
|
|
|
|
|
Dн |
|
|
||
|
ï |
μ |
min |
при |
|
L £ L |
- |
. |
|
|
||
|
|
|
|
|
||||||||
|
ï |
|
|
|
|
ж |
2 |
|
|
|
||
|
î |
|
|
|
|
|
|
|
|
|
||
4.2. Методика выполнения работы
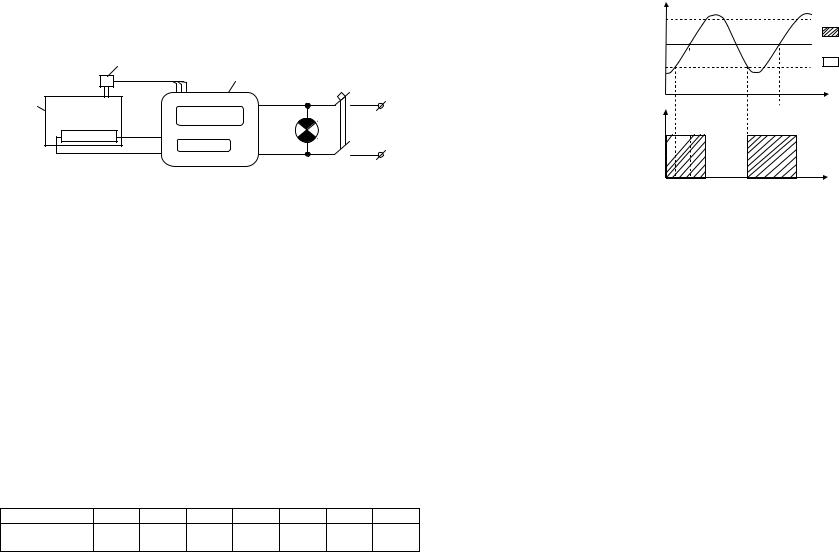
Объектом исследования является тепловой объект ТО, температура кото- рого измеряется термометром Т, подключенным к измерителю-регулятору ИР «Сосна 003М». Нагрузкой являются теплопотери в окружающую среду. Тепло- носитель – электроэнергия. Нагревательный элемент НЭ – сопротивление про- водки.
26
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
Позиционное регулирование осуществляет измеритель-регулятор «Со- сна». Он предназначен для измерения и регулирования технологических пара- метров (температура, давление, уровень и др.) регулируемого объекта. Изме- ренное значение входного сигнала выводится на индикаторное табло и одно-
временно сравнивается с внесённым в память устройства желаемым значением регулируемого параметра. Соответственно выбранному закону регулирования
осуществляется анализ результатов сравнения и создание на их основе сигналов регулирующих воздействий. На выходе ИР есть два реле К1 и К2. Реле К1 включается для увеличения регулируемого параметра, а К2 – для уменьшения.
|
Т |
|
|
ИР |
QF |
|
|
|
ТО |
|
|
НЭ |
НL |
220 В |
|
50 Гц |
|
|
|
|
|
Рис. 4.4. Схема лабораторной установки |
|
На передней панели находятся два табло. Верхнее индикаторное табло пред- назначено для отображения измеренного значения параметра или значения пара- метра настройки. Нижнее индикаторное табло предназначено для отображения задаваемого значения или названия параметра настройки. Кнопка "П" предназна- чена для записи обновленных значений в память прибора и параметров настройки. Кнопки > и ^ служат для выбора значений параметров настройки и ввода число- вых значений.
В приборе установлен модуль интерфейса, который позволяет управлять прибором посредством компьютера, а также выдавать информацию на совмести- мый компьютер.
«Сосна 003М» работает в комплекте с термопреобразователем сопротивле- ния (ТСП, ТСМ), термоэлектрическими преобразователями (ТХК, ТХА, ТЖК) и унифицированными сигналами постоянного тока величиной 0...5, 0...20, 4...20 мА.
Двухпозиционное регулирование осуществляется посредством одного ре- ле. Оно включено при Θ < ΘЖ − H и выключено при Θ > ΘЖ + H . В диапазо-
не ΘЖ ± H
рис. 4.5.
Для исследования двухпозиционной системы регулирования температу- ры включить автоматический выключатель QF и снять зависимость темпера- туры от времени θ=f(t) . Перед экспериментом надо уточнить условия его выполнения у преподавателя. Данные записать в следующую таблицу:
Результаты исследования.
Время, с
Температура,
˚С
27
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
По итогам опыта построить график переходного процесса θ=f(t). В соот-
ветствии с принципами двухпозиционного регулирования построить график включения и выключения реле К2 (рис.4.5).
θ |
|
|
+ н |
реле К1 |
|
θж |
||
включено |
||
− н |
реле К1 |
|
выключено |
||
|
||
μ |
t |
|
|
К1 
t
Рис. 4.5. Принцип работы ИР при двухпозиционном регулировании
По полученным зависимостям определить амплитуду положительного ΔΘ + и отрицательного ΔΘ − отклонения температур от желаемого θж значения. Определить время включения Т1, время отключения Т2 и период регулирования Т=Т1+Т2 (рис.4.2, г).
Содержание отчета
1.Название работы и ее цель.
2.Описание принципа двухпозиционного регулирования.
3.Описание методики выполнения работы и измерителя-регулятора
“Сосна 003”.
4.График θ=f(t), график включения и отключения реле и необходимые рас-
четы для получения Q+, Q – , Т1, Т2, Т. 5. Выводы.
28
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
Лабораторная работа № 5 ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Цель работы – изучение структуры, принципов управления (разомкнутый, замкнутый), исследование динамических характеристик и определение показа- телей качества систем автоматического управления.
5.1. Принципы формирования алгоритмов управления
Система автоматического управления (САУ) – это совокупность объекта управления (ОУ) и устройства управления (УУ), которые взаимодействуют ме- жду собой определенным образом и исполняют задаваемые функции без непо- средственного участия человека.
Объектом управления называют агрегат, машину, комплекс машин, осуществляющих технологический процесс, в котором необходимо поддержи-
вать на желаемом уровне или менять по определенному закону управляемый параметр.
Техническое устройство, посредством которого осуществляется автомати- ческое управление объектом, называется устройством управления.
Управляемым параметром называется физическая величина, которая ха- рактеризует ход технологического процесса в ОУ и которая поддерживается УУ на желаемом значении.
Устройство управления действует по алгоритму управления, который представляет собой совокупность внешних организованных воздействий на ОУ, что обеспечивает задаванный алгоритм функционирования.
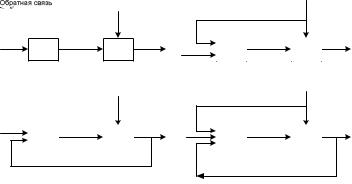
Воснове каждой САУ лежит некоторый принцип управления, который формируется в зависимости от используемой информации. При этом различают два основные типа САУ – разомкнутый и замкнутый.
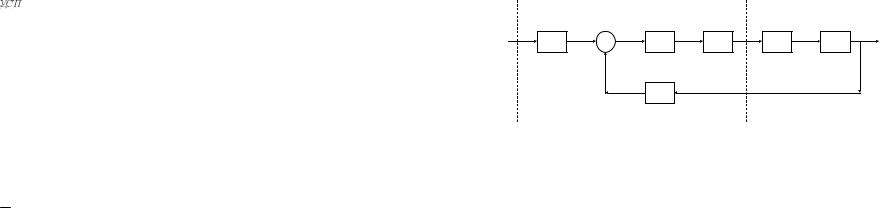
Вразомкнутых САУ выходная величина ОУ y не измеряется. Существуют разомкнутые САУ, которые управляют только по заданному воздействию z (рис. 5.1, а) или только по возмущению v (рис. 5.1, б).
Первые используют, когда характеристики ОУ хорошо определены и зна- чению входной переменной точно соответствует значение выходной перемен- ной y.
Второй тип разомкнутых САУ используют тогда, когда возмущение v дос- тупно измерению. В данном случае можно не ждать его проявления на выходе ОУ, а сразу корректировать сигнал на входе объекта ОУ по величине перемен- ной v. Этот принцип управления получил название принципа управления по возмущению.
29
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Рис. 5.1. Структурные схемы САУ
Если принять, что на объект управления действуют разные возмущения и только часть из них подчиняется управляющему воздействию УУ, тогда для бо- лее точного управления используют замкнутые системы (рис. 5.1, в, г). В них на вход УУ подают заданное воздействие z и выходную величину ОУ y. УУ срав- нивает заданное значение z с фактическим y, и в зависимости от величины от- клонения формируется сигнал коррекции U. На величину отклонения влияет возмущение v. Если возмущение v непрерывно меняется, то существует боль- шее или меньшее отклонение у от z, и вырабатывается непрерывно коррекция U
(рис. 5.1, в).
Принцип управления по отклонению является наиболее распространен- ным в САУ, которые также называют САУ с обратной связью или системами автоматического регулирования (САР).
Более сложными являются системы, где совмещаются управления по воз- мущению и по отклонению. Это объединение двух принципов получило назва- ние комбинированного принципа управления (рис. 5.1, г).
САР в зависимости от цели управления и характера изменения заданного воздействия делятся на стабилизирующие, программные и следящие.
Стабилизирующие САР поддерживают технологические переменные на постоянных значениях с заданной точностью. Если технологический процесс требует смен значений переменных по программе, согласно с технологическим регламентом, то используют САР, которые называют программными. Задачи
слежения за изменениями переменных и отображения значений выполняют следящие системы.
5.2. Автоматические регуляторы
Чтобы достичь необходимых качественных показателей системы, надо иметь возможность изменять параметры частей ее элементов. Таким элементом является автоматический регулятор (АР), который формирует свой выходной
30
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
сигнал m(t ) в соответствии с законами управления. В качестве входного сигна-
ла АР выступает ошибка управления ∆(t) между фактическим значением y и за- даваемым значением z выходного параметра системы.
Автоматические регуляторы позволяют влиять на амплитуду и фазу вход- ного сигнала, что выражается соответствующими математическими зависимо- стями, которые были названы типовыми законами регулирования.
Закон регулирования – это математическая зависимость
m(t) = f (D(t)).
Для изменения амплитуды входного сигнала используется пропорцио- нальный закон регулирования (П-закон),
m(t) = Kпр × D(t) ,
где Kпр – коэффициент пропорциональности
Для реализации отставания по фазе сигнала пользуются интегральным за- коном регулирования (И-закон)
1 T
м(t) = Ti ò0 D(t) × dt ,
где Ті – время интегрирования; Т – интервал времени.
Для опережения по фазе сигнала используют дифференциальный закон, m(t) = Tд × dDdt(t) ,
где Тд – время дифференцирования.
Коэффициенты Kпр, Ті, Тд называют параметрами настройки регуляторов. Регуляторы могут объединять элементарные законы. Так были созданы про- порционально-интегральный (ПИ):
T
m(t) = Kпр ×D(t) + Ki òD(t) × dt
0
и пропорционально-интегрально-дифференциальный (ПИД) законы регулиро- вания:
m(t) = Kпр ×D(t) + Ki TòD(t) × dt + Kd |
× dD(t) . |
0 |
dt |
|
Значения коэффициентов определяют специальными методами с учетом технологических требований к системе.
31
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
5.3. Цифровые системы управления
Рис. 5.2. Схема одноконтурной цифровой САУ
Управляемое воздействие в цифровой САУ определяется по запрограмми- рованному алгоритму вычислительным устройством ВУ цифрового регулятора ЦР. Входными величинами устройства сравнения УС служат дискретные зна- чения заданного воздействия z [n·To] и выходного параметра ОУ y [n·To], кото- рые получаются на выходе аналого-цифровых преобразователей (АЦП) с анало- говых сигналов z(t) и y(t) соответственно.
Информация обрабатывается ВУ в дискретные моменты времени через равные интервалы Т0, которые называют интервалами управления. Работа эле- ментов ЦР синхронизируется таймером регулируемого времени. ВУ вырабаты- вает новую последовательность чисел U [n·To], которая преобразуется в непре- рывные сигналы u(t) для воздействия на ОУ через исполнительное устройство
ИУ.
Алгоритм цифрового типового регулятора рассмотрим путем перехода от модели аналогового ПИД-закона регулирования.
Как и в аналоговом регуляторе, пропорциональная составляющая выход-
ного сигнала соответствует изменению величины входного сигнала в тот же момент времени
Kпр ×Dk [k ×T0 ].
В цифровых регуляторах интеграл от непрерывной функции (t) заменя-
|
|
K |
ют суммой прямоугольников åD[k ×T0 ]×T0 , а дифференциал – отношениями |
||
|
|
i=1 |
dD(t) |
» D[k ×T0 ] |
= D[k ×T0 ] - D[(k -1) ×T0 ] . |
dt |
Dt |
Dt |
Тогда ПИД-закон регулирования для k-го интервала цифрового регулятора
будет иметь вид
mk |
= Kпр ×D[k ×T0 ] + |
T |
n |
T |
(D[k ×T0 ] - D[k -1]×T0 ). |
T |
åD[k ×T0 ] + |
T |
|||
|
|
0 |
|
d |
|
|
|
i |
k =0 |
0 |
|
32
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com

5.4. Показатели качества систем автоматического управления
Качество систем стабилизации часто оценивают по переходной характе- ристике, которая отображает реакцию выхода системы на ступенчатое воздей- ствие (рис. 5.3).
y
|
2εн |
εуст |
|
A2 |
|
|
|
|
|
A1 |
+εн |
yж |
|
|
|
−εн |
|
|
|
tрег
t
Рис. 5.3. Переходный процесс системы автоматического управления
Через уж обозначено желаемое значение выхода на скачкообразное воз- действие. Через εн показана заранее заданная ошибка системы. Значение ошиб- ки 2εн создает границы, в которые должна попасть переменная y(t ) в момент
времени tрег . Это время называют временем регулирования. Максимальное
превышение y(t) над уж получило название перерегулирования. Оно определя- ется по следующей формуле:
σ = A1 ×100% . yж
Разница y(t → ∞) − yж = εуст называется статической ошибкой, которая
определяет точность системы управления в статическом режиме. Степень затухания переходного процесса определяется по формуле:
ψ = A1 − A2 .
A1
Для промышленных систем считаются хорошими переходные процессы с
ψ≈ 0,75.
5.5.Описание лабораторной установки
Объектом САУ является теплообменник с электрическим нагревателем Н. Температура объекта определяется датчиком температуры ДТ, сигнал с которо- го подается на измеритель-регулятор ТРМ. Он управляет величиной тока в на- гревателе Н, это значит, меняет приток тепла в объект.
Напряжение питания на установку подается автоматическим выключате- лем SF. Это фиксируется загоранием лампы HL. Объект подключается к регу- лятору переключателем S1.
33
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Рис. 5.4. Схема лабораторной установки |
Выключателем S2 подается питание на вентилятор, который служит для охлаждения и создания возмущения на ОУ. ПК служит для дистанционного управления ТРМ и отображения процессов регулирования. Управляющим уст- ройством является измеритель-регулятор ТРМ101. В данной работе он реализу- ет ПИД-закон регулирования.
5.6. Краткое описание измерителя-регулятора ТРМ101
Приборы ТРМ в комплекте с первичным преобразователем предназначены для измерения физического параметра ОУ, отображения этого параметра на
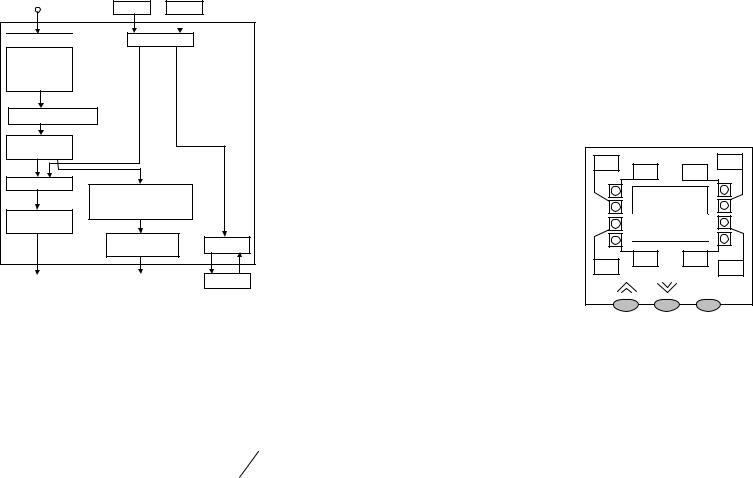
встроенном цифровом индикаторе и для формирования сигналов управления выходными устройствами, которые осуществляют регулирование измеряемого параметра. Функциональная схема прибора приведена на рис. 5.5. ТМР имеет универсальный вход 1 для подключения датчиков разных типов, дополнитель- ный вход 2 для дистанционного управления, цифровой фильтр, ПИД-регулятор
иустройство стабилизации, выходные устройства 1 и 2 и интерфейс RS-485.
Для измерения температуры используют термопреобразователи сопротивления
итермоэлектрические термометры (термопары). Для измерения других пара- метров используют датчики с преобразователями этих параметров в унифици- рованные сигналы постоянного тока 4...20 мА, 0...5 мА или напряжения - 50...+50 мВ и 0...1 В. В приборе предусмотрена автоматическая коррекция тем- пературы свободных концов термопары. Ключ 1 осуществляет пуск и останов- ку процесса регулирования. Ключ 2 включает дистанционное управление при- бором через интерфейс RS-485. Цифровой фильтр уменьшает влияние случай- ных импульсных воздействий на измерения.
34
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
|
Пуск/Остановка |
Включение |
|
Датчик |
регулирования |
RS-485 |
|
Ключ 1 |
Ключ 2 |
|
|
|
|
||
Вход 1 |
Вход 2 |
|
|
Масштабирова- |
|
|
|
ние шкалы (для |
|
|
|
аналогового |
|
|
|
входа) |
|
|
|
Цифровой фильтр |
|
|
|
Коррекция |
|
|
|
измерения |
|
|
|
ПИД-регулятор |
Сигнализация о выходе |
|
|
|
|
||
|
регулируемой величины |
|
|
Выходное |
за заданные границы |
|
|
|
|
|
|
устройство 1 |
|
|
|
|
Выходное |
|
RS-485 |
|
устройство 2 |
|
|
|
|
|
|
К исполнительному |
Сигнализация, |
ПЭВМ |
|
устройству |
регистрация |
|
|
Рис. 5.5. Функциональная схема прибора ТМР101 |
|||
На выходе регулятора вырабатывается управляемый (выходной) сигнал Yі, действие которого направлено на уменьшение отклонения Еі:
|
1 |
æ |
|
|
1 |
n |
|
|
|
|
ö |
|
||
Y = |
çE |
+ |
å |
E Dt |
изм |
+τ |
д |
DEi |
÷ |
×100% , |
||||
|
|
|
|
|||||||||||
i |
|
ç |
i |
|
|
|
i |
|
÷ |
|
||||
|
X p è |
|
|
τи i=1 |
|
|
|
|
Dtизм ø |
|
||||
где Хр – полоса пропорциональности; Еі – рассогласование; tд – время диффе- ренцирования; tи – время интегрирования; Еі – разность между соседними из- мерениями Еі и Еі-1; tизм – время между соседними измерениями.
Из формулы видно, что при ПИД-регулировании сигнал управления зави-
сит от пропорциональной Ei / X p , дифференциальной |
DEi ×τ д |
и инте- |
||
|
|
|
|
X p × Dtизм |
|
1 |
n |
|
|
гральной |
åEi × Dtизм составляющих. |
|
|
|
|
|
|
||
|
X p ×τи i=0 |
|
|
|
Для работы ПИД-регулятора необходимо установить правильные для кон- кретного ОУ значения коэффициентов Хр, tд и tи, которые можно определить в режиме «АВТОНАСТРОЙКА» или «РУЧНАЯ НАСТРОЙКА».
Эффективный контроль за процессом регулирования обеспечивает логи- ческое устройство, которое включает аварийную сигнализацию, действие кото- рой определяется свечением светодиода «AL» или «LBA» на передней панели
35
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
прибора.
На передней панели прибора находятся индикаторы:
·верхний цифровой индикатор красного цвета для отображения измеряемой величины или названия программируемого параметра;
·нижний цифровой индикатор зеленого цвета отображает вставку или значе- ние программируемого параметра;
·восемь светодиодов красного цвета постоянного свечения: «К1» - включение выходного устройства 1; «К2» – включение выходного устройства 2; «AL» – светится, когда параметр выходит за задаваемые границы; «LBA» – показа- ние обрыва контура регулирования; «П/С» - пуск процесса регулирования; «ПН» - предыдущая автонастройка; «ТН» - точная настройка; «RS» - управ- ление (рис. 5.6).
К2 |
К1 |
ПН |
|
П/С |
|
|
Верхний цифровой |
|
|
индикатор |
|
|
Нижний цифровой |
|
|
индикатор |
|
AL |
LBA |
RS |
|
TH |
|
|
|
ПРОГ |
Рис. 5.6. Элементы индикации и управления |
||
Кнопки на панели имеют следующие значения:  - увеличение значения параметра;
- увеличение значения параметра; - уменьшение значения параметра; ПРОГ вход в меню програм- мирования или переход к следующему параметру.
- уменьшение значения параметра; ПРОГ вход в меню програм- мирования или переход к следующему параметру.
5.7. Методика выполнения работы
Всоответствии с целью работы надо исследовать динамические характе- ристики и определить показатели качества САУ.
Вработе исследуется стабилизирующая система автоматического управ- ления. Для таких систем возможны два вида воздействий: по заданию и по на- грузке.
Воздействие по заданию возникает всегда, когда надо изменить режим ра- боты объекта, например по требованию технологического процесса. Это, как правило, выполняет оператор сменой величины заданного значения регулируе-
мого параметра, в нашем случае температура Тз. Поскольку в начале выполне- ния работы величина Тз устанавливается (по заданию преподавателя) на регуля- торе ТРМ, а ОУ имеет температуру, равную температуре окружающей среды,
то разность Тз = Тз – Тн и есть величина воздействия по заданию.
Чтобы получить переходную характеристику САУ под влиянием этого
36
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
воздействия, надо подать питание на установку выключателем ТРМ SF и под- ключить ОУ к регулятору выключателем S1. Сразу надо включить секундомер. Данные записать в табл. 5.1.
Данные реакции системы на воздействие по заданию |
Таблица 5.1 |
||||||||
|
|
||||||||
Время, с |
0 |
60 |
120 |
180 |
240 |
300 |
|
••• |
|
Т, °С |
|
|
|
|
|
|
|
|
|
Со временем температура в объекте должна достичь заданного значения
Тз.
Основная задача стабилизирующих САУ - поддерживать заданное значе-
ние регулируемого параметра независимо от места и времени возникновения воздействий.
Наиболее сильным является воздействие по нагрузке объекта. Нагрузкой объекта являются его теплопотери в окружающую среду. Поэтому чтобы соз- дать такое воздействие, необходимо включить вентилятор В и секундомер. Вначале температура уменьшается, а затем регулятор должен ее восстановить. Данные этого эксперимента записать в табл. 5.2.
|
Данные реакции системы на воздействие по нагрузке |
Таблица 5.2 |
|||||||||
|
|
|
|||||||||
t, с |
|
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
••• |
|
Т, °С |
|
|
|
|
|
|
|
|
|
|
|
Эксперименты требуется проводить до того времени, пока температура не достигнет устойчивого значения.
По результатам эксперимента построить графики переходных процессов T = f (t) и определить все показатели качества (рис. 5.3).
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ С ИСПОЛЬЗОВАНИЕМ ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА
5.1. Особенности лабораторной установки
При включении стенда автоматическим выключателем QF (синий выклю- чатель) не происходит запуск процесса регулирования. САР начинает работу только после установки переключателя «Нагреватель» в положение «ВКЛ» (это следует делать только при выполнении работы).
! Настоятельно не рекомендуется пытаться самостоятельно изменить
настройки регулятора.
Примечание. Буквой М помечены ссылки на методическое пособие. 5.2. Ход выполнения работы
ДОПУСК
1.Найти в лабораторном стенде объект регулирования и регулятор, ис- пользуемый для реализации САР.
2.Сформулировать цель данной САР (можно включить стенд выключате- лем QF для визуального ознакомления с регулятором).
3.Описать алгоритм работы САР.
37
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
МЕТОДИКА ВЫПОЛНЕНИЯ РАБОТЫ
1.Включить стенд (QF) и компьютер. На регуляторе нажать правую кноп- ку для отображения желаемого значения температуры.
2.Запустить программу Lab5 (ярлык на рабочем столе).
3.Запуск процесса записи данных осуществляется нажатием соответст- вующей кнопки в окне программы (черный треугольник). Одновременный за- пуск процесса регулирования (переключатель «Нагреватель» в положение «ВКЛ») приведет к снятию переходной характеристики по заданию. После за- пуска процесса программа каждые 20 секунд опрашивает прибор «OWEN» и записывает в отчет фактическое значение температуры объекта (отчет можно посмотреть только после выполнения работы).
4.После стабилизации температуры на желаемом значении (значение не изменяется в течение минуты) приостановить процесс (кнопка в окне програм- мы - две вертикальные линии).
5.Запустить процесс (черный треугольник в окне программы), одновре- менно включить вентилятор (переключатель «Вентилятор» в положение «ВКЛ»). Это приводит к снятию переходной характеристики по нагрузке.
6.После стабилизации температуры на желаемом значении (значение не изменяется в течение минуты) остановить процесс (кнопка - квадрат).
7.Нажать кнопку вывода таблицы отчета (вторая справа).
8.Найти время запуска своего процесса. Переписать изменение темпера- туры в зависимости от времени. Значения температуры переписывать с интер- валом в минуту. Для этого следует выписывать каждое третье значение.
Первое значение соответствует начальному моменту времени
5.3.Содержание отчета
1.Графики зависимости температуры от времени: переходные процессы по заданию и по нагрузке.
2.Определить по графикам показатели качества переходных процессов.
5.4.Материал к защите
1.Схема регулирования с обратной связью. Практический смысл каждого сигнала в конкретной системе регулирования (сигнал задания, сигнал ошибки, выходной (измеренный) сигнал, сигнал управления).
2.Алгоритм работы ПИД регуляторов.
3.График переходного процесса. График изменения сигнала ошибки во времени (под ним).
4.Назначение регуляторов.
Содержание отчета
1.Краткое описание принципов формирования алгоритмов управления.
2.Описание законов регулирования. 3. Общие сведения о цифровых системах.
4.Показатели качества САУ 5. Схема лабораторной установки. 6. Краткое опи- сание ТРМ101. 7. Таблицы и графики экспериментов. 8. Показатели качества переходных процессов САУ.
38
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com

Лабораторная работа № 6
ИЗУЧЕНИЕ БЛОКИРОВОЧНЫХ СВЯЗЕЙ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Цель работы – изучение типовых блокировочных связей в системах авто- матического управления (САУ) и получение практических знаний по созданию рабочих программ для управления технологическим оборудованием.
6.1. Общие сведения
САУ технологическим оборудованием очень разнообразны. Однако есть общие принципы их построения, знание которых значительно облегчает анализ и эксплуатацию таких схем. К ним относятся: кнопочное управление, методы построения блокировки, сигнализация и т. д.
Кнопочное управление работой САУ часто осуществляется посредством кнопок, размещенных на пульте управления. При нажатии кнопки замыкается или размыкается цепь обмотки соответствующего релейного элемента, а при отпускании - возвращается в исходное положение. Кнопка включения имеет замыкающий контакт и устанавливается в цепь питания обмотки реле. Чтобы после ее отпускания реле оставалось в рабочем состоянии, используется само- блокировка (рис. 6.1, а).
SB2 SB1 KV1
KV1.1
а
SB1 |
|
KV1 |
|
|
|
SB2 |
KV1.1 |
KV2 |
SB3 |
KV2.1 |
KV3 |
SB1 SB4 SB5 SB6 KV1 |
||
SB2 |
|
|
SB3 |
|
|
KV1.1 |
б |
|
|
|
|
SB1 KV2.1 KV1 |
||
SB2 |
KV1.1 |
KV2 |
|
||
|
|
|
в г
Рис. 6.1. Кнопочное управление и типовые блокировки
Блокировка исключает возможность нарушения нормального порядка включения или эксплуатации САУ. Наиболее распространенными являются са- моблокировка, взаимная и последовательная блокировки.
Самоблокировка заключается в использовании замыкающего контакта KV1.1 включаемого реле KV1 для дублирования контактов пусковой кнопки SB1. После срабатывания реле, независимо от положения кнопки SB1, сохраня- ется цепь питания его обмотки.
При необходимости управлять включением и выключением реле из раз-
39
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
ных мест на каждом из них устанавливают кнопки включения и выключения (рис. 6.1, б). Все пусковые кнопки (SB1, SB2, SB3) включаются между собой параллельно, а все кнопки остановки (SB4, SB5, SB6) – последовательно. При этом самоблокировка строится по общему принципу.
Последовательная блокировка обеспечивает только один определенный порядок включения схемы (рис. 6.1, в). При последовательной блокировке цепь
обмотки включаемого реле должна проходить через замыкающий контакт того реле, раньше которого включение не должно срабатывать, это значит, что пре- дыдущее по ходу включения реле KV1 должно своим замыкающим контактом KV1.1 разрешить включение следующего KV2 и т.д.
Взаимная блокировка исключает возможность одновременного срабаты- вания двух или нескольких реле (рис. 6.1, г). Например, нельзя допустить одно- временное срабатывание двух реле, которые включают электродвигатель для вращения в разные стороны. Для осуществления взаимной блокировки в цепь первого реле KV1 включается последовательно размыкающий контакт KV2.1 второго реле KV2, одновременно с которым первое реле KV1 не должно рабо- тать.
Для ограничения передвижения механизма, или его остановки в любой
промежуточной или конечной точке пути используют блокировки ограничения пути перемещения. Их выполняют посредством конечных выключателей (рис. 3.2). Примеры использования такой блокировки показаны на рис. 6.2. Бук- вами SQ обозначены конечные выключатели на схемах управления. В первой схеме остановленный выключателем SQ механизм нельзя снова пустить в том же направлении нажатием кнопки SB2. Во второй схеме это можно сделать.
SB1 SB2 SQ KМ1 |
SB1 SB2 |
KМ1 |
KМ1.1 |
KМ1.1 SQ |
|
а |
б |
|
Рис.6.2.Блокировки ограничения пути перемещения
Используя рассмотренные выше основные блокировки, можно составить более сложные схемы управления оборудованием. Такие схемы можно реали- зовать на релейно-контактных электромагнитных технических средствах или на программированных логичных контроллерах (ПЛК). Исследуем эти схемы.
6.2. Схема управления конвейерной линией
Схема управления конвейерной линией (рис. 6.3) должна обеспечивать: пуск электроприводов навстречу, а остановку – по ходу технологического про- цесса; остановка любого конвейера должна вызвать остановку всех предыду- щих; возможность независимого пуска каждого механизма во время послере- монтных испытаний и наладки.
40
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com