

Автоматика(лабораторные работы) v1.5
.2.pdfРис. 6.3. Схема конвейерной линии
Рассмотрим блокировки, которые обеспечивают согласованность работы отдельных узлов производственного механизма.
Схема состоит из силовых цепей (рис. 6.4, а) и цепей управления (рис. 6.4, б). Перед пуском линии необходимо подать питание на силовые цепи включением автоматических выключателей QF1, QF2 и QF3, которые также осуществляют защиту этих цепей от коротких замыканий.
u
380B v 50 Гц
v 50 Гц w
w
QF1 |
QF2 |
QF3 |
I> |
I> |
I> |
 КМ1.1КМ1.2 КМ1.3
КМ1.1КМ1.2 КМ1.3  КМ2.1КМ2.2 КМ2.3
КМ2.1КМ2.2 КМ2.3  КМ3.1КМ3.2 КМ3.3
КМ3.1КМ3.2 КМ3.3
FR1 |
FR2 |
FR3 |
M1 |
M2 |
M3 |
|
|
а |
|
|
FU1 |
SB1 |
SB2 |
KМ1 |
FR1 |
|
|
SL |
|
|
|
|
KM1.4 1 SA1.1 |
|
|
SB3 SB4 KM1.5 KМ2 FR2
|
KM2.4 1 SA1.2 |
|
|
|
SB5 |
SB6 |
KM2.5 |
KМ3 |
FR3 |
|
|
|
|
|
KM3.4 |
SA1.3 |
|
|
1 |
2 |
б
Рис. 6.4. Схема управления конвейерной линией
41
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
В автоматическом режиме переключатель режимов работы системы SA1 ставят в положение 1, что соответствует разомкнутому положению контактов SA1.1, SA1.2 и SA1.3. При незаполненном бункере Б2 контакт сигнализатора уровня SL закрыт и возможен пуск конвейера 1, если нажать кнопку SВ2. При этом замкнется цепь питания катушки магнитного пускателя (МП) КМ1 через элементы SB1-SB2-SL-KМ1-FR1. КМ1 своими силовыми замыкающими кон- тактами КМ1.1, КМ1.2 и КМ1.3 замкнет цепь питания электродвигателя (ЭД) М1, что приведет к его запуску, а значит, и к запуску конвейера 1. Также замк- нется контакт самоблокировки КМ1.4 и контакт последовательной блокировки КМ1.5 в цепи катушки КМ2, что подготовит условие к пуску конвейера 2.
При нажатии кнопки SВ4 замкнется цепь питания МП КМ2. Он обеспечит включение ЭД М2 контактами КМ2.1, КМ2.2, КМ2.3, а контакт КМ2.5 подго- товит условие для пуска конвейера 3. Для его включения необходимо нажать кнопку SВ6.
Такое применение типичных блокировок обеспечивает требования техно- логического процесса к системе автоматического управления.
При переполнении бункера Б2 разомкнется контакт SL, что приведет к от- ключению МП КМ1, а вслед за этим КМ2 и КМ3.
Режим наладки осуществляется переводом переключателя SA1 в положе- ние 2, что соответствует замкнутому состоянию SA1.1, SA1.2 и SA1.3. Таким образом, контакт сигнализатора уровня SL и контакты, которые обеспечивают последовательную блокировку КМ1.5 и КМ2.5, шунтируются. Теперь конвейе- ры могут запускаться независимо один от другого кнопками SВ2, SВ4, SВ6, а останавливаться кнопками SВ1, SВ3 и SВ5 соответственно.
Тепловые реле FR1, FR2 и FR3 защищают ЭД от длительных перегрузок. Соответствующий контакт теплового реле в цепях питания разомкнется, и со- ответствующий МП отключится.
6.3. Типовые схемы САУ в функции перемещения
Управление в функции пути применяется в станках, прессах и поточных линиях для ограничения перемещения механизма или его остановки в проме- жуточной (или конечной) точке пути.
На рис. 6.5 приведена схема управления реверсивным ЭД М с ограничени- ем пути перемещения посредством конечных выключателей SQ1 и SQ2. Он че- рез редуктор 1 вращает винт 2, по которому движется механизм (гайка) 3 с упо- ром. Величина пути передвижения упора ограничена положением SQ1 и SQ2.
42
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com

3×380/220B, |
|
|
|
|
|
|
50 Гц |
|
|
|
|
|
|
QF |
|
|
SB1 |
SB2 |
KМ1 |
|
|
|
|
|
SQ1.1 KМ2.5 |
||
I> |
|
|
|
KМ1.4 |
||
T> |
|
|
|
|||
|
|
|
SQ2.2 |
|
||
|
|
|
|
SA1.1 |
||
КМ1.1КМ1.2 КМ1.3 КМ2.1 |
КМ2.2 КМ2.3 |
SB3 |
||||
SQ2.1 KМ1.5 KМ2 |
||||||
|
|
|
|
|||
|
|
|
|
KМ2.4 |
||
|
SQ2 |
|
SQ1 |
SQ1.2 |
SA1.2 |
|
M |
|
|
|
|||
|
|
|
1 |
2 |
||
|
|
|
|
|||
1 |
2 |
3 |
|
|
|
|
|
|
|
|
|
||
Рис. 6.5. Схема системы автоматического управления обратно- |
||||||
|
поступательным движением механизма |
|||||
Каждый из выключателей имеет по два контакта: один размыкающий SQ1.1 и SQ2.1, а второй замыкающий SQ1.2 и SQ2.2. При механическом сило- вом воздействии (нажатии) на выключатель SQ1 (SQ2) его нормально замкну- тый контакт SQ1.1 (SQ2.1) размыкается, а нормально разомкнутый SQ1.2 (SQ2.2) – замыкается.
Существует полуавтоматический (остановка в крайнем левом или правом положении) и автоматический (задаваемый переключателем SA) режимы рабо- ты.
При полуавтоматическом режиме, когда SA1 находится в положении «1», при нажатии кнопки SВ2 замкнется цепь питания КМ1, что приведет к движе- нию упора в направлении «вправо». В конце пути он нажимает на конечный выключатель SQ1, вследствие чего разорвется цепь питания КМ1 и ЭД остано- вится. Пуск механизма в направлении «влево» осуществляется нажатием на кнопку SB3. Последовательность включения элементов схемы будет такая же, как и при движении «вправо». Конец пути при этом фиксируется выключате-
лем SQ2.
В автоматическом режиме, когда SA1 находится в положении «2», при движении механизма «вправо» сработает выключатель SQ1, в итоге разомкнет- ся SQ1.1 и цепь питания КМ1. Механизм остановится, но замкнется SQ1.2 в це- пи питания КМ2. Он включится, ЭД реверсируется и механизм сразу будет двигаться «влево».
Таким образом, будет осуществляться обратно-поступательное движение механизма без нажатия кнопки SB1.
На рис. 6.6 представлен вариант схемы 6.5, в которую добавили два реле времени КТ1 и КТ2, контакты которых КТ1.1 и КТ2.1 имеют выдержку време- ни при замыкании, что приводит к задержке механизма в крайних положениях.
43
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
SB1 |
SB2 |
|
KМ1 |
|
|
SQ1.1 KМ2.5 |
|
|
KМ1.4 |
|
|
|
КТ2.1 |
|
|
|
SB3 |
SQ2.1 KМ1.5 KМ2 |
|
|
KМ2.4 |
|
|
|
КТ1.1 |
SQ1.2 |
КТ1 |
|
|
||
|
|
SQ2.2 |
КТ2 |
Рис. 6.6. Схема цепей управления САУ циклической работы
механизма с выдержкой времени
Пуск механизма в направлении «вправо» осуществляется нажатием кноп- ки SВ2. Движение продолжается до конечного выключателя SQ1, который сво- им контактом SQ1.1 разорвет цепь пускателя КМ1 и отключит механизм, а за- мыкающим контактом SQ1.2 замкнет цепь питания катушки реле времени КТ1. Со временем замкнется контакт КТ1.1, который включит КМ2, и механизм ре- версируется. При воздействии на конечный выключатель SQ2 он своим контак- том SQ2.1 размыкает цепь катушки КМ2 и останавливает ЭД, а контактом SQ2.2 включает цепь питания катушки реле времени КТ2. Со временем вклю- чится КМ1. Цикл повторяется. Для остановки механизма в любом месте необ- ходимо нажать кнопку SВ1.
В схемах рис. 6.5 и 6.6 контакты КМ1.5 и КМ2.5 осуществляют взаимо- блокировку.
6.4. Программируемый логический контроллер
Системы управления, выполненные на основе электромагнитных реле или микросхем с "твердой" логикой, невозможно научить исполнять другую работу без существенной переработки. Такую возможность имеют только программи-
руемые логические контроллеры (ПЛК).
ПЛК представляет собой специализированную ЭВМ, которая осуществля- ет логические связи между состоянием входных элементов схемы с выходны- ми. Физически типичный ПЛК представляет собой блок, который имеет набор выходов и входов, для подключения датчиков и исполнительных механизмов
(рис. 6.7).
44
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
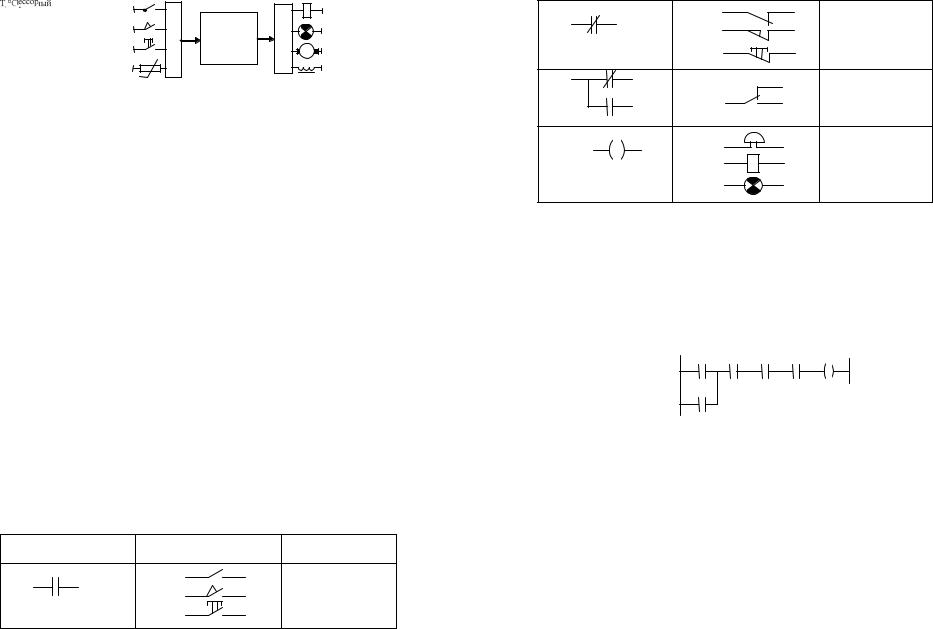
Рис. 6.7. Схема ПЛК
Логика управления описывается программно на основе микрокомпьютер- ного ядра. Абсолютно одинаковые ПЛК могут исполнять совсем разные функ- ции. Причем для изменения алгоритма работы не требуется никаких перерабо- ток аппаратной части. Аппаратная реализация ориентирована на сочетание с унифицированными приборами. ПЛК контролирует состояние входов (кнопок управления, конечных выключателей, датчиков и др.) и вырабатывает опреде-
ленные последовательности программно задаваемых действий на изменение выходов (магнитных пускателей, сигнальных ламп, исполнительных механиз- мов, электромагнитов и т. д.) (рис. 6.7).
В самом начале цикла ПЛК исполняет физическое чтение входов. Считан- ные значения размещаются в области памяти входов. Таким образом, создается полная одномоментная зеркальная копия значений входов. Далее исполняется программа пользователя. Эта программа работает с копией значений входов и выходов, которая расположена в оперативной памяти. После выполнения кода
ПЛК приводит физические выходы в соответствие с расчетными значениями и размещает их в области памяти выходов.
Программа пользователя работает только с мгновенной копией входов. Таким образом, значения входов в процессе выполнения программы постоян- ные в границах одного рабочего цикла. Вычисления в ПЛК всегда повторяются циклически. Одна итерация, которая включает замер, обсчет и выработку воз- действия, называется рабочим циклом. Значения входов обновляются автома- тически в начале каждого рабочего цикла.
ПЛК имеют специальный язык для описания алгоритма управления. Ши-
роко используют язык релейных диаграмм (LD) или релейно-контактных схем (РКС).
Зрительное восприятие РКС - диаграмм и обозначений базовых элементов интуитивно понятное (табл.6.1).
Таблица 6.1
Обозначения базовых элементов РКС - диаграмм
РКС ГОСТ Комментарий
2.755-87
Замыкающий кон- такт реле, конечно- го выключателя, кнопки и т. д.
45
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Размыкающий кон- такт реле, конечно- го выключателя, кнопки и т. д.
Переключающий
контакт
Нагрузка: обмотка реле, электрозво- нок, лампа и т. д.
Каждому графическому отображению элементов РКС - диаграммы при- сваивается буквенно-цифровое обозначение. Оно обычно соответствует обо- значению элемента на исходной релейно-контактной схеме (рис. 6.5, 6.6).
Графически РКС - диаграмма представляется в виде двух вертикальных шин питания. Между ними размещены горизонтальные цепи, созданные кон- тактами и нагрузкой. В качестве нагрузки используют обмотки реле, лампы и т. д. (рис. 6.8)
SR1 RR1 R2 R3 R1
R1
Рис.6.8.Схема одной цепи РКС - диаграммы
Количество контактов в цепи произвольное, но нагрузка одна. Когда по- следовательно соединенные контакты замкнуты, ток идет по цепи и реле вклю- чается (рис. 6.8).
6.5. Характеристика установки и методика выполнения работы
В лабораторной работе исследуется ПЛК НІТАСНІ FС-28. Контроллер имеет 16 дискретных входов и 12 дискретных выходов. Память программ – 1949 слов. Принцип выполнения программ циклический. Скорость выполнения 1,5 мкс на одну базовую команду. Количество программируемых тайме- ров/счетчиков 96. Связь – последовательный интерфейс RS-232.
Входы и выходы обозначаются латинскими буквами Х и Y, а таймеры и
46
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
счетчики буквами Т/С. Внешние входы имеют адреса Х00 ... Х15, а выходы – Y200...Y211. Таймеры имеют две базы времени 0,01 с и 0,10 с. База времени выбирается автоматически при вводе в зависимости от записи. Таймеры с но- мерами 0...9 определяются с использованием четырех цифр, а таймеры с номе- рами 10...95 – трех цифр при базе 0,1 с. При этом диапазон изменения времени для таймеров 0...9 лежит в границах 0,1 ... 999,9, а для таймеров 10...95 – в гра- ницах 1...999 с. При базе времени 0,01 с все таймеры устанавливаются с ис-
пользованием трех цифр и диапазон изменения времени лежит в границах 0,01...9,99 с. Бегущее значение таймера запускается при включении таймера и начинает возрастать. Когда бегущее значение станет равным определенному, замкнется контакт таймера. Когда катушка таймера отключается, бегущее зна- чение сбрасывается на «0» и контакт таймера размыкается. Бегущее значение каждого таймера сохраняется в памяти.
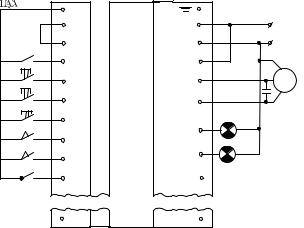
Схема соединений внешних входов и выходов контроллера дана на рис. 6.9, а назначение подключенных элементов приведено в табл. 6.2 и 6.3.
Лабораторная установка состоит из исполнительного электродвигателя 1, который двигает упор 2 (рис. 6.10).
Движение упора вверх ограничивает конечный выключатель SQ1, а вниз – SQ2. Управление передвижением осуществляют кнопками SВ1, SВ2 и SВ3. На-
хождение упора в крайних положениях определяется включением сигнальных ламп HL1 и HL2. Все входные и выходные устройства стенда электрически со- единены с контроллером 3.
При использовании обозначенных устройств требуется составить РКС - диаграмму для заданной преподавателем схемы системы управления. После проверки РКС-диаграммы необходимо по ней запрограммировать контроллер.
Рис. 6.9. Схема соединения контролера
47
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Таблица 6.2
Таблица подключения внешних входов контролера
Адрес входа |
Обозначение |
Назначение элементов схемы |
|
||
контролера |
на РКС |
|
|
|
|
Х00 |
SB1 |
Выключение нагрузки |
|
|
|
Х01 |
SB2 |
Кнопка |
включения |
механизма |
на |
|
|
движение вверх |
|
|
|
Х02 |
SB3 |
Кнопка |
включения |
механизма |
на |
|
|
движение вниз |
|
|
|
Х03 |
SQ1 |
Конечный выключатель ограничения |
|||
|
|
движения механизма вверх |
|
||
Х04 |
SQ2 |
Конечный выключатель ограничения |
|||
|
|
движения механизма вниз |
|
||
Х05 |
SA |
Переключатель режимов работы |
|
||
SТА |
SN |
Сигнал старта контролера |
|
||
Таблица 6.3
Таблица подключений внешних выходов
Адрес выхода |
Назначение нагрузки |
контролера |
|
Y200 |
Обмотка двигателя, которая включает механизм |
|
при движении вверх |
Y 201 |
Обмотка двигателя, которая включает механизм |
|
при движении вниз |
Y 202 |
Лампа, которая сигнализирует о движении ме- |
|
ханизма вниз (HL2) |
Y 203 |
Лампа, которая сигнализирует о движении ме- |
|
ханизма вверх (HL1) |
Для ввода, редактирования и отображения программы необходим персо- нальный компьютер 3. Программирование ПЛК при помощи компьютера осу- ществляется поэлементно, последовательным нажатием ряда клавиш, которые определяют функцию элемента, его адрес, связь с соседними элементами. При
этом вся необходимая информация по вводу программы появляется на экране дисплея. Порядок работы с клавиатурой ПК при программировании ПЛК при- веден в табл. 6.4.
Содержание отчета
1. Название и цель работы. 2. Описание основных типичных блокировок в релейно-контактном выполнении. 3. Заданная схема системы управления в ре- лейно-контактном выполнении. 4. РКС - диаграмма.
48
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
4
1
|
SQ1 |
|
3 |
|
|
|
К |
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
|
|
SQ2 |
Н |
|
|
|
2 |
Т |
|
|
HL1 |
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
HL2 |
SB1 |
|
Л |
|
|
|
|
Л |
|
|
|
|
|
|
|
|
|
|
SB2 |
|
Е |
|
|
220 В, |
|
Р |
|
HL |
||
|
|
|
|||
SB3 |
|
|
|
50 Гц |
|
|
|
SA |
|
||
|
|
|
QF |
||
|
|
|
|
||
|
|
|
|
|
Рис. 6.10. Схема лабораторной установки
Таблица 6.4
Назначение клавиш ПК
Обозначение кла- |
Описание функции |
||||
виш |
|
|
|
|
|
F1 |
Клавиша помощи |
||||
ALT+F1 |
Помощь для режима on-line |
||||
ESC |
Выход и вызов меню |
||||
(Alt/Ctrl)+−,↓,→,← |
Рисование / стирание линий (кнопки −,↓,→,← располо- |
||||
|
жены на цифровой клавиатуре справа при выключенном |
||||
|
NumLock) |
||||
Spase (пробел) |
Переключатель рисования/стирания |
||||
Ins |
Установка нового блока (буфера) |
||||
|
Замена блока |
||||
+ |
Анализ блока и сохранение в буфере |
||||
− |
Удалить блок сохраненный в буфере |
||||
Del |
Удалить блок |
||||
F7 |
Функция |
||||
Shift+F7 |
Инверсия функции |
||||
F8 |
Таймер/счетчик (Т/C) |
||||
Shift+F8 |
Инверсия Т/C |
||||
F9 |
Катушка –( )– |
||||
Shift+F9 |
Инверсия катушки –( / )– |
||||
F10 |
Замыкающий контакт –| |– |
||||
Shift+F10 |
|
|
|
|
|
Размыкающий контакт |
|
|
|
||
|
|
||||
Alt+F5 |
Включение режима контроля |
||||
Alt+F6 |
Выключение режима контроля |
||||
Alt+F7 |
Запуск ПЛК |
||||
|
49 |
|
|
|
|
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Alt+F8 |
Остановка ПЛК |
Alt+F9 |
Включение связи ПЛК с компьютером (режим on-line ) |
Alt+F10 |
Выключение связи ПЛК с компьютером |
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
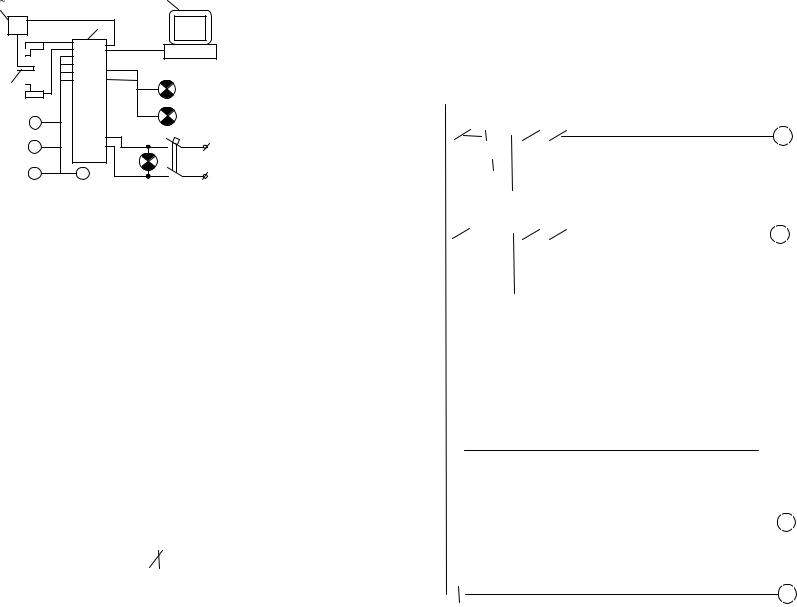
1. Привести схему представленную на рис. 6.11. к виду удобному для програм- мирования, используя таблицу 6.1. В качестве реле времени использовать тай- меры. Ввести сигнализацию включения катушек реле.
SB1 SB2 |
SQ1 |
KM2 |
|
KM1 |
||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KM1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
SAKT2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
SQ2 KM1 |
KM2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
SB1 SB3 |
||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KM2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
SA KT1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
SQ1 |
|
|
|
|
|
|
TMR T000 |
|||||||||||||||||
|
|
|
|
|
|
5 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KT1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SQ2 |
TMR T001 |
|||
5 |
||||
|
|
|
||
|
|
|
KT2 |
|
|
|
|
||
|
|
|
||
|
|
|
|
|
KM1 |
HL1 |
||||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
KM2 |
HL2 |
||||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.11. Схема LD
50
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
2.Включить компьютер.
3.Загрузить программу Active-E щелкнув на пиктограмме «Лабораторная работа №6».
4.Нажать клавишу ВВОД( ). Всплывает окно загрузки проекта. Выбрать пункт «New project, go to setup» и нажать Ввод.
6.Всплывает окно «PLC configuring». Т.к. тип контроллера и его пара-
метры уже установлены, то нажать ESC. Программа готова к работе. 7. Курсор находится вверху на левой шине.
Перед началом программирования рекомендуется описать входные и вы- ходные переменные.
Для этого необходимо нажать клавишу ESC, вверху появляется строка меню. Выбрать пункт Allocation и затем выбрать «ENTER/Change». Нажать клавишу ВВОД. Появляется окно «Allocation», котором необходимо набрать «0» и нажать ВВОД. Появляется окно входов начиная с I 000. В соответствии с рис. 6.9. ввести краткое описание входов (I 000 SB1). Нажать ВВОД. Кур- сор переходит в позицию, где можно дать пояснение, например, «кнопка stop». Если пояснение не вводится, нажать клавишу ВВОД. Далее процедура повторя- ется для всех входов. По окончании нажать клавишу «ESC». Ввести в окно «Allocation» 200 и нажать ВВОД. Появляется окно выходов начиная с 200. В соответствии с рис. 6.9 ввести краткое описание выходов. При этом выход 200 обозначить КМ1, а выход 201 – КМ2.
По окончании нажать клавишу ESC. Ввести в окно «Allocation» Т0. По- является окно таймеров начиная с Т 000. При описании таймеров используем краткие имена КТ1 и КТ2. После ввода КТ1 нажав ВВОД 2 раза выходим в столбец для установления времени таймера. Вводим цифровое значение 5. То же повторяем для КТ2. По окончании описания нажать клавишу ESC два раза.
Используя табл. 6.4 набрать запрограммированную схему. После набора каждой цепи нажать клавишу <INS>.
51
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
Лабораторная работа № 7
ИССЛЕДОВАНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
Цель работы – изучение принципа построения и исследования автомати- ческой системы управления частотой вращения асинхронного электродвигате- ля.
7.1. Регулирование частоты вращения АЭД
В настоящее время в промышленности используют электропривод как по- стоянного, так и переменного токов. Но благодаря быстрому развитию силовой
полупроводниковой техники наиболее распространенными стали регулируемые электроприводы переменного тока с асинхронными электродвигателями (АЭД). АЭД имеют простую конструкцию, они технологичны, дешевы, изготавлива- ются в больших количествах.
Наиболее распространенными являются два метода регулирования часто- ты вращения АЭД: частотный и векторный.
Частотный метод. Заключается в регулировании частоты вращения маг- нитного поля статора АЭД ω за счет изменения частоты напряжения питания fc его обмоток. Это вытекает из зависимости
ω0 = 2πfс / p ,
где fc – частота напряжения питания обмоток статора; р – число пар полюсов
АЭД.
Частота вращения ротора определяется как
ω = ω0 (1− s) ,
где s – скольжение.
Полное использование АЭД возможно, когда он работает с номинальным магнитным потоком Ф, который обладает геометрическими размерами и физи- ческими свойствами магнитной цепи. Магнитный поток Ф двигателя создает ток намагничивания I0, который пропорционален ЭДС Еs
Es = 4,44ΦfcWcKоб ,
где Wс – количество витков обмотки статора; Коб – обмоточный коэффициент. Приняв K = 4,44WcKоб , получим Es = KФfc , тогда Ф = E / fcK = const , это
значит, что для полного использования АЭД вместе с изменением частоты пи- тания fc необходимо пропорционально ей изменять Es . Если не учитывать со-
противление статора, то получим следующее выражение для потока: Φ = U / fc = const , которое представляет собой пропорциональный закон час-
тотного управления. Механические характеристики АЭД при этом управле- нии приведены на рис. 7.1. При регулировании частоты вращения вверх от но- минальной ωн механическая мощность, которую развивает АЭД при увеличе-
52
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
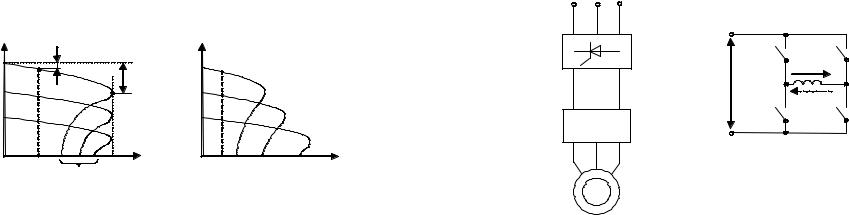
нии частоты, остается постоянной (рис. 7.1, б), а при регулировании вниз – по- стоянным остается момент (рис.7.1, а).
w, S |
Sн |
w |
|
|
|
w0 |
w0 |
|
|
||
Sк |
|
|
|||
wн |
w’0 |
f6 < f5 |
|
||
w’0 |
f1 = fнам |
|
|||
wu0 |
wu0 |
f5 < f4 |
|||
f2 < f1 |
|||||
|
|
|
|
||
|
f3 < f2 |
|
|
f = f4 |
|
Мн |
М |
Мн Мп Мп1 |
Мп2 |
М |
|
Мк |
|
||||
|
Мп |
б |
|
|
|
|
а |
|
|
||
Рис.7.1. Механические характеристики АЭД
Для получения переменного напряжения, регулируемого по амплитуде и по частоте, используют статические преобразователи, которые содержат управ- ляемый выпрямитель и инвертор (рис. 7.2, а). В выпрямителе напряжение пере- менного тока сети питания Uс постоянной частоты fc преобразуется в напряже- ние постоянного тока Ud, величина которого может изменяться. В инверторе
напряжение постоянного тока преобразуется в напряжение переменного тока U2 необходимой частоты.
Таким образом, напряжение регулируется в выпрямителе, а частота в ин- верторе.
Инвертор представляет собой набор полупроводниковых ключей- переключателей (VT1-VT4), которые коммутируют обмотки двигателя. На рис. 7.2, б показана схема однофазного инвертора, нагрузкой которого является одна из трех обмоток АЭД. Направление тока в обмотке меняется посредством клю- чей, которые работают попарно. При работе ключей VT1 и VT4 по обмотке те- чет ток, направление которого показано сплошной стрелкой. При работе клю- чей VT2 и VT3 ток меняет направление на противоположное (пунктирная стрелка).
53
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
|
Uc = const |
|
|
|
fc = const |
|
|
|
УВ |
VT1 |
VT2 |
+ |
− Ud |
Ud |
|
|
f = 0 |
VT3 |
VT4 |
|
И |
||
|
|
|
|
|
f2 = var |
|
|
|
U2 = var |
б |
|
|
M |
|
|
|
|
|
а
Рис. 7.2. Принцип частотного управления
Схема трехфазного инвертора состоит из трех рассмотренных схем. Рабо- та ключей строго согласована по времени, чтобы напряжения на отдельных об- мотках были смещены по фазе на 120 градусов.
При частотном управлении АЭД магнитный поток двигателя в переход- ном процессе не остается постоянным, поэтому возможны колебания электро- магнитного момента и частоты вращения. Чтобы избежать этого, используют векторное управление, в котором в качестве регулируемых величин выступают пространственные векторы электромагнитных величин АЭД.
Векторное управление. Основывается на пространственной ориентации вектора напряжения и преобразовании неподвижной трехфазной системы в двухфазную систему, которая вращается. Исходной информацией для осущест- вления векторного управления являются мгновенные значения токов, частота вращения вала ротора, модуль и угол магнитного потока (рис. 7.3).
54
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com

|
|
|
|
|
|
|
|
|
ψ |
РП |
|
РТ1 |
U1α |
|
U1x |
UA |
|
− |
|
− |
|
ПФ2 UВ |
|
|||
|
|
− |
БПК2 |
ПЧ |
||||
ω |
÷ |
|
РТ2 |
U1β |
|
U1y |
UС |
|
РС |
|
|
|
|
|
|
||
− |
|
|
− |
− |
|
|
|
|
БК |
|
|
i1α |
|
|
i1x |
|
|
|
|
|
i1β |
БПК1 |
ПФ1 |
|
|
|
|
|
|
|
|
|
i1y |
|
|
|
|
|
|
ТА |
|
наблюда |
|
|
|
|
|
|
|
|
тель |
|
|
|
|
|ψ| |
БВМ |
|
|
|
|
|
|
|
|
|
|
|
|
АЭД |
|
|
|
|
|
|
|
|
|
|
Рис. 7.3. Структурная схема преобразователя частоты с векторным
бездатчиковым управлением
Система векторного управления состоит из двух каналов управления: мо- дуля вектора потокосцепления ротора ψ и частоты вращения ротора ω . Двух- канальная система управления позволяет осуществить независимое регулиро-
вание модулем вектора потокосцепления и частотой вращения при сохранении прямой пропорциональности между моментом АЭД и составляющей намагни- чивающей силы статора.
Для измерения текущих значений тока используют специальные датчики. Измерение вектора магнитного потока обычно осуществляется датчиками Хол- ла в воздушном зазоре АЭД, но это не всегда возможно. Поэтому в схеме рис. 7.3 для расчета вектора потокосцепления использован специальный блок «на- блюдатель», который выполняет его моделирование на основе значений проек- ций векторов тока и напряжения.
Блоки преобразования фазы осуществляют преобразование трехфазной системы координат в двухфазную (ПФ1) и наоборот (ПФ2). В канал регулиро-
вания потока РП введён зависимый контур регулирования тока намагничивания і1х с регулятором РТ1. В контур регулирования скорости (РС) для получения
возможности регулирования момента в режимах ослабления поля введён блок деления и предусмотрен зависимый контур регулирования активного тока с ре- гулятором РТ2. Блок компенсации БК осуществляет развязку каналов РС и РП. Тригонометрический анализатор ТА высчитывает фазу вектора магнитного по- тока в данный момент. Блок БПК1 выполняет поворот вектора намагничиваю- щей силы статора на угол, равный мгновенной фазе вектора потокосцепления ротора в осях αβ относительно неподвижных осей ху. Блок БПК2 осуществляет преобразование составляющих напряжения статора U1α , U1β жестко связанных
55
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
с вектором потокосцепления ротора в составляющие U1x и U1y неподвижных осей. Блок БВМ выделяет модуль вектора потокосцепления Y .
Трехфазная система переменных напряжений UA, UB, UC используется для
управления амплитудой и частотой выходного напряжения преобразователя частоты (ПЧ).
Векторное управление без датчиков обратной связи по скорости позволяет обеспечить динамические погрешности, характерные для привода с обратной связью. Однако управление моментом при погрешностях регулирования <1% невозможно без обратной связи по частоте вращения.
7.2. Измерительные преобразователи частоты вращения
Для измерения частоты вращения используют тахометры, в качестве кото- рых используют тахогенераторы (ТГ) аналоговые и цифровые.
Аналоговые тахогенераторы представляют собой электрические микро- машины переменного или постоянного токов (рис. 7.4).
|
|
Статор |
|
ω |
R |
Uвых |
|
L |
Uн |
||
BR |
|||
|
|
Uвых |
|
|
|
ω |
|
|
|
Ротор |
U 
α
Zн
β
 Uвых
Uвых
а |
б |
в |
Рис. 7.4. Тахогенераторы постоянного (а, б) и переменного (в) токов
Тахогенераторы постоянного тока имеют независимое возбуждение или возбуждаются от постоянных магнитов (рис. 7.4, а). Входная величина ТГ – уг- ловая скорость ω , выходная – напряжение Uвых, которое определяется по со- противлению нагрузки.
Статическая характеристика (рис. 7.4, б) ТГ постоянного тока есть зави-
симость
Uвых = |
KΦ |
щ= Kтг × щ, |
1+ R / R |
||
|
тг н |
|
где Kтг – коэффициент передачи ТГ; K – конструктивная постоянная; Ф – маг- нитный поток возбуждения; Rтг – сопротивление якорной обмотки ТГ.
ТГ переменного тока выполнен на базе асинхронной двухфазной машины (рис. 7.4, в). На статоре размещены две взаимно перпендикулярные обмотки: обмотка возбуждения, размещенная по оси α , и рабочая обмотка, размещенная по оси β . Выходное напряжение ТГ переменного тока практически линейно за- висит от угловой скорости. В современных системах автоматизированного
электропривода с большим диапазоном регулируемой скорости и цифровым управлением используют цифровые тахогенераторы (ЦТГ). Как правило, это
56
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
фотоэлектрический импульсный датчик, принцип работы которого рассмотрен в работе 3.
7.3. Характеристика установки и методика выполнения работы
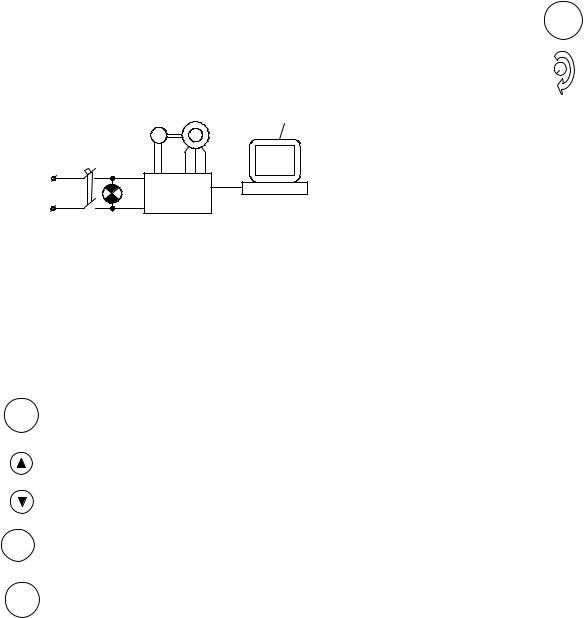
В работе исследуется электропривод с асинхронным электродвигателем, который содержит короткозамкнутый ротор и инвертор TOSHIBA с векторным управлением (рис. 7.5).
BR |
M |
ПК |
|
|
QF |
|
|
220В, |
HL |
Toshiba |
|
50 Гц |
|||
|
|
Рис.7.5. Схема лабораторной установки
Инвертор получает питание от сети переменного тока через выключатель QF, о чём сигнализирует лампочка НL. К инвертору подключён трёхфазный АЭД М, частота вращения которого измеряется аналоговым тахогенератором ВR. Управление инвертором осуществляется с панели управления инвертора или с персонального компьютера ПК, который подключен к инвертору через интерфейс. Назначение и функции элементов панели инвертора приведены в таблице 7.1.
|
|
|
|
Таблица7.1 |
|
Назначение и функции элементов панели инвертора |
|||||
Символьное обозна- |
Назначение элемента |
Функция |
|
||
чение элемента |
панели |
|
|
|
|
|
Кнопка управления |
Осуществляет |
|
переклю- |
|
МON |
(контрольная кнопка) |
чение режимов |
управле- |
|
|
|
ния (рабочий, установки |
|
|||
|
|
|
|||
|
|
параметров, статусный) |
|
||
|
Кнопка «вверх» Up |
Выбор параметра |
|
||
|
|
|
|
||
|
Кнопка «вниз» Down |
Выбор параметра |
|||
|
|
|
|
||
|
Кнопка «ПУСК» |
Если нажать кнопку при |
|||
RUN |
|
включенной |
|
лампе |
|
|
«ПУСК», |
произойдёт |
|
||
|
|
|
|||
|
|
старт двигателя |
|
|
|
|
Кнопка «СТОП» |
Если нажать кнопку при |
|
||
STOP |
|
включенной лампе, двига- |
|
||
|
|
тель плавно остановится |
|
||
|
|
|
|
|
|
|
57 |
|
|
|
|
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2 |
|||||
|
Кнопка «ВВОД» |
Читает и записывает час- |
|
ENT |
(Enter) |
тоту и значение параметра |
|
|
|
|
|
|
Регулятор частоты |
Позволяет настроить час- |
|
|
(потенциометр) |
тоту, если инвертор нахо- |
|
|
|
дится в режиме использо- |
|
|
|
вания потенциометра |
|
PRG |
Индикатор PRG |
Горит, когда инвертор на- |
|
(программирование) |
ходится в режиме уста- |
||
|
|||
|
|
новки параметров |
|
RUN |
Индикатор «ПУСК» |
Мигает, если инвертор |
|
RUN |
работает |
||
|
Назначение элементов панели управления инвертора приведено в таблице. На панели есть светодиодный дисплей, на котором показана выходная частота инвертора, аварийные ситуации (прекращение "С", перегрузка "L", перенапря- жение "Р", перегрев "Н"), состояние инвертора и значения параметров.
Инвертор позволяет осуществлять запуск и остановку двигателя с панели и посредством внешних сигналов на входные терминалы, изменение частоты потенциометром, обеспечить необходимый темп разгона и замедления в грани- цах времени от 0,1 до 3000 с.
Для исследования инвертора необходимо получить у преподавателя диа- грамму изменения частоты вращения вала двигателя, определить последова- тельность действий по программированию инвертора с ПК и, после проверки программы преподавателем, выполнить исследование.
Содержание отчета
1. Дать краткое описание цели работы, основных теоретических положе- ний. 2. Начертить структурные схемы методов управления частотой вращения вала АЭД, задаваемую преподавателем диаграмму изменения частоты враще- ния, последовательность действий по программированию инвертора посредст- вом ПК и экспериментальную диаграмму.
58
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2
PDF created with pdfFactory Pro trial version www.pdffactory.com
МЕТОДИКА РАБОТЫ С УПРАВЛЯЮЩЕЙ |
2 – экспорт данных (один параметр) из компьютера в ПЧ и их запись в его |
|
ПРОГРАММОЙ ИНВЕРТОРА |
память; |
|
|
3 |
– импорт выделенных данных (нескольких параметров) из памяти ПЧ в |
Включить компьютер и подать напряжение на преобразователь частоты |
компьютер; |
|
(ПЧ), переведя автоматический выключатель, расположенный на лицевой пане- |
4 |
– экспорт выделенных данных (нескольких параметров) из компьютера в |
ли стенда, в положение «1 ВКЛ». |
ПЧ и их запись в его память; |
|
Ознакомиться с методикой работы управляющей программой инвертора. |
5 |
– сравнение выделенных параметров; |
Для этого на вкладке «Программы» выбрать «PCM001Z». В появившемся окне |
6 |
– переход к режиму осциллографа. |
программы указать тип и модификацию ПЧ, выбрать английский язык и нажать |
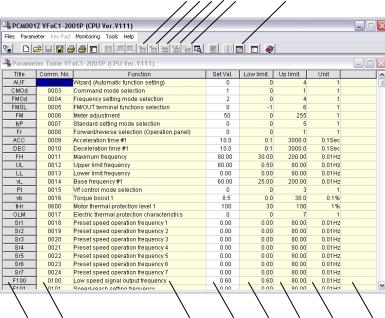
Таблица параметров имеет следующие поля: |
|
кнопку «ОК». В результате на экране отобразится диалоговое окно программы |
7 |
– обозначение настраиваемого параметра ПЧ; |
с таблицей параметров ПЧ, которые могут быть изменены в целях его соответ- |
8 |
–порядковый номер параметра; |
ствия условиям технологического процесса. Диалоговое окно представлено на |
9 |
– наименование настраиваемого параметра ПЧ; |
рис.1. |
|
10 – установленное (измененное) значение выбранного параметра (белый |
|
|
столбец); |
1 2 3 4 5 |
6 |
11, 12 – наименьшее и наибольшее значение величины, задаваемого пара- |
метра ПЧ соответственно; 13 – минимально возможный шаг изменения переменной задаваемого па-
раметра ПЧ и единицы ее измерения; 14 – отметка об изменении переменной параметра ПЧ. При внесении из-
менении в значение переменной выбранного параметра ПЧ появляется надпись
«Changed».
Работа с осциллографом осуществляется следующим образом. При нажа- тии на кнопку 6 (рис. 1) открывается диалоговое окно осциллографа (рис. 2).
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
Рис.1
На панели управления диалогового окна размещен ряд кнопок со следую- щим назначением:
1 – импорт всех данных из памяти ПЧ в компьютер;
59 |
60 |
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2 |
Автоматика, автоматизация и АСУТП / Автоматика и АПП (лабораторные работы) ‘09 v.1.5.2 |
PDF created with pdfFactory Pro trial version www.pdffactory.com