КП
.docМіністерство освіти і науки молоді та спорту України
ДЕРЖАВНИЙ ВИЩИЙ НАВЧАЛЬНИЙ ЗАКЛАД
«КИЇВСЬКЙ НАЦІОНАЛЬНИЙ ЕКОНОМІЧНИЙ УНІВЕРСИТЕТ ІМЕНІ ВАДИМА ГЕТЬМАНА»
РОМЕНСЬКИЙ КОЛЕДЖ
Спеціальність: 5.091504 «Обслуговування комп’ютерних та інтелектуальних систем та мереж»
Курсовий проект з предмету: Комп’ютерна схемотехніка
Тема: «Цифровий тахометр - годинник »
РК КНЕУ. КП. 5.091504. 010 ПЗ
|
Перевірив викладач Шокота Т. А. |
|
Виконав: студент гр. К 3-1 Юрченко А.В. |
2013
|
Зміст Вступ 1 Загальний розділ 7 1.1 Призначення проектуємого пристрою 7 1.2 Технічні характеристики 13 1.3 Розробка і обґрунтування схеми електричної структурної 14 2 Спеціальний розділ 16 2.1 Вибір і обґрунтування елементної бази 16 2.2 Принцип роботи окремих ВІС з використанням часових діаграм та алгоритмів роботи 20 2.3 Принцип роботи пристрою згідно схеми електричної принципової 30 3 Експлуатаційний розділ 31 3.1 Ініціалізація програмуємих ВІС 31 3.2 Тест перевірки окремих вузлів або пристроїв 28 3.3 Розрахунок надійності пристрою 29 4 Анотація 36 5 Література 37 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Арк |
№ докум |
Підп |
Дата |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Викон. |
Лук’янов В.О. |
|
|
Замок кодовий на основі мікроконтролера AVR |
літ |
лист |
листів |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Перевір |
Шокота Т.А. |
|
|
|
нУ |
|
2 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Гр. К 3-1 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Вступ Комп’ютерна схемотехніка – це науково-технічна дисципліна, яка вивчає теоретичні методи аналізу і синтезу схем комп’ютерів (електронних обчислювальних машин) і засоби їхньої технічної реалізації. Розвиток комп’ютерної схемотехніки є основою удосконалення архітектури комп’ютерів, якісного підвищення їхньої продуктивності та надійності, істотного зменшення масових та габаритних показників. Ідеєю цього курсового проекто є практичне засвоєння накопичених знань, що є узагальненням всієї програми курсу цього предмету. Завдання складається з декількох частин, що охоплюють велику кількість матеріалу, тому для виконання курсового проекту потрібно мати достатню кількість знань і досконало орієнтуватися в предметі “Схемотехніка ЕОМ”. Впровадження мікропроцеcорної і цифрової техніки в пристрої управління промисловими об'єктами вимагає від фахівців самого різного профілю швидкого освоєння цієї галузі знання. У процесі розробки функціональних схем цифрових пристроїв чітко виділяються два характерних етапи. На першому етапі, який можна назвати структурним проектуванням, заданий неформально алгоритм розробник представляє у вигляді послідовності деяких операторів, таких, як отримання результату, рахунок, перетворення коду, передача інформації. При цьому він намагається використовувати обмежений набір загальноприйнятих операторів. При використанні цих операторів, як правило, алгоритм можна представити досить невеликою їх кількістю.. За технічним вимогам як функціональних вузлів схеми можна застосувати або готові блоки в інтегральному виконанні, або, якщо таких мікросхем в наявності немає, синтезувати їх з більш простих елементів. Подібний синтез спочатку проводиться за допомогою алгебри логіки, після чого за отриманими функцій будується еквівалентна схема. Однак, як правило, синтезовані схеми гірше їх аналогів в інтегральному виконанні. До цього призводять такі обставини: більший час затримки, великі габарити, більше споживання енергії. Тому результативного проектування цифрових пристроїв розробник повинен вміти: вибрати найбільш прийнятний варіант вирішення поставленого завдання, працювати з алгеброю логіки, знати основні цифрові елементи і вміти їх застосовувати , по можливості знати найбільш прості й поширені алгоритми
рішення основних завдань. Знання найбільш поширених інженерних прийомів у проектуванні пристроїв дозволить в майбутньому відразу скористатися готовою схемою, не займаючись марною роботою. Необхідно зауважити, що реалізація схеми набагато складніше, ніж просте рішення задачі в алгебрі логіки і наборі отриманої функції з логічних елементів. Насправді навіть, здавалося б, найпростіші елементи, необхідно включати за певною схемою, знати призначення всіх висновків. Необхідно знати, чим різняться елементи в межах серії. Розуміння внутрішньої логіки мікросхеми особливо важливо саме для фахівців з автоматики і промисловій електроніці, оскільки цифрові мікросхеми самого початку створювалися для виконання суворо визначених функцій у складі ЕОМ. В умовах автоматики й радіотехніки вони часто виконують функції, не заплановані в свій час їх розробниками, і грамотне використання мікросхем в цих випадках прямо залежить від розуміння логіки їх роботи. Добре знання тонкощів функціонування схем вузлів стає життєво необхідним при пошуку несправностей, коли потрібно визначити, чи є несправність в даному вузлі або ж на його вхід надходять комбінації сигналів, на які схема вузла не розрахована.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
3 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1 ЗАГАЛЬНИЙ РОЗДІЛ 1.1 Призначення проектуємого пристрою У курсовому проекті прийняті наступні скорочення: БА - буфер адреси; БД - буфер даних; ВІС - велика інтегральна схема; ОС - обчислювальна система; ГТІ - генератор тактових імпульсів; ЗП - запам'ятовуючий пристрій; ІС - інтегральна схема; МС - мікросхема; МА - магістраль адреси; МД - магістраль даних; МК - магістраль керування; МП - мікропроцесор; МПС - мікропроцесорна система; ОЗП - оперативно-запам'ятовуючий пристрій; ПДП - прямий доступ у пам'ять; ПЗП - постійно-запам'ятовуючий пристрій; ЦП - центральний процесор; ПВВ - пристрій введення-виведення; ЕОМ - електронно-обчислювальна машина; ЧТП - читання пам'яті; ЗПП - запис у пам'ять; ПВВ З- запис у пристрої введення/виведення; ППРЕ- підтвердження переривання.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
4 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Даний бортовий прилад призначений для вимірювання частоти обертів колінчастого вала бензинового чотирьохтактного двигуна внутрішнього згорання (основний режим) і відображення поточного часу (додатковий режим). Табло пристрою показує частоту обертання з дискретністю в 1 хв-1 і секунди, хвилини і години. Працює прилад від бортової мережі автомобіля с споживає струм 0,012А. Існує два різновиди цього приладу - цифровий тахометр і тахометр аналоговий. Вони різняться за своїм внутрішнім устроєм і за зовнішнім виглядом, тобто за способом відображення інформації. Цифровий тахометр оснащений електронним монітором, на якому відображаються необхідні дані. Аналоговий тахометр справляється з покладеним на нього функцією за допомогою руху стрілки по розміченому циферблату. .
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
5 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1.2 Технічні характеристики
При проектуванні схеми електричної принципової використано PIC контролер . В цьому розділі докладно викладені технічні дані про контролер PIC16F28.
Технічні характеристики і особливості мікроконтролера PIC16F28:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
6 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
1.3 Розробка і обґрунтування схеми електричної структурної
Вхідний
формувач імпульсів
Рідкокристалічний
індикатор
МК
Кнопки
Стабілізатор
напруги
Дільник
напруги
Формувач імпульсів - генерує електричні імпульси заданої частоти (зазвичай прямокутної форми) для синхронізації різних процесів в цифрових пристроях - ЕОМ, електронних годинниках і таймерах, в мікропроцесорній та іншій цифровій техніці. Тактові імпульси часто використовуються як еталонна частота - рахуючи їх кількість, можна, наприклад, вимірювати часові інтервали.
Мікропроце́сор — інтегральна схема, яка виконує функції центрального процесора або спеціалізованого процесора. Стабілізатор напруги - перетворювач електричної енергії, що дозволяє отримати на виході напругу, що знаходиться в заданих межах при великих коливаннях вхідної напруги і опору навантаження. Дільник напруги- електротехнічний пристрій для ділення напруги постійного або змінного струму на частини. Рідкокристалічний індикатор- це електронний пристрій візуального відображення інформації, принцип дії якого ґрунтується на явищі електричного переходу Фредерікса в рідких кристалах. Дисплей складається з довільної кількості кольорових або монохромних точок (пікселів), і джерела світла або відбивача.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
7 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 Спеціальний розділ 2.1 Вибір і обґрунтування елементної бази Тахометер некретичний до вибору застосованих деталей. Резистори і конденсатори можуть мати допуск ±10%. Стабілізатор напруги КР142ЕН5А (пригодний КР142ЕН5В або імпортний 7805) в охолодженні непотрібен. Тринзистор КТ315Б можна замінити на КТ3102 з будь- яким буквенним індексом, стабілітрон КС133А- на КС139А, а КС515А- на КС518А або інший на напругу 15…19 вольт (можливо також застосувати спеціальний автомобільний варистор SIOV S10K14AUTO фірми Siemens Matsushita Components). Світлодіод АЛ307Б або АЛ307БМ (пригодний тільки «червоний»!), працюючий низьковольтним стабістором, можна замінити стабістором КС113А (або КС115А), але при цьому резистор R10 необхідно буде підібрати по робочому струму стабілізації. Конденсатори С1, С2, С4, С5- КМ- 5, КМ- 6; С3, С6- оксидні імпортні. Резистори- МЛТ С2-33. Перемикач SA1- ПД9- 2; Кнопки SB1, SB2- МП12. Модуль- індикатор можна замінити любим іншим з контролером НТ1613. 2.2 Принцип роботи окремих ВІС з використанням часових діаграм та алгоритмів роботи Програма в формі Intel HEX, яку необхідно ввести в контролер DD1. Правильно зібраний із справних деталей приладу в налагодженні не нуждається і починає працювати відразу після подачі живлення. Точність показників приладу залежить від частоти кварцового генератора ZQ1
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
8 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3 Принцип роботи пристрою згідно схеми електричної принципової
Принципова схема тахометра зображена на кресленні. Основа приладу- мікроконтролер DD1 PIC16F628 фірми Microchip. Можливо також використання іншого мікроконтролера цієї фірми, але пожадобиться деякі виправлення програми і плати. Основні вузли приладу: віхідний формувач імпульсів (Резистори R1- R2, стабілітрон VD1 і транзистор VT1); стабілізатор напруги ( стабілітрон VD2, конденсатори C3- C6, мікросхема DA1); рідко кристалічний індикатор (HG1); дільник напруги на резисторі R10 та світлодіоді HL1 для живлення індикатора HG1 ( приблизно 1,7В); органи керування: перемикач SA1 "Режим" для вибору режиму роботи приладу ("Тахометр" - "Часи") та кнопки SB1 "HB" для налаштування часу та SB2 "УВ" для налаштування часу режимі годинника. Контролер встановлюється в вихідне положення автоматично при включенні живлення. При високому рівні на вході MCLR контролер заходиться в робочому стані. Програма передбачає також автоматичний перехід контролера у вихідний стан при зависанні, для цього використовується вмонтований сторожовий таймер. В приладі використовується дисятирозрядний жидкокристалічний модуль індекатор, оснащений контролером HT1613 фірми Holtek з послідовною загрузкою інформації по лінії DI і синхронізацією по лінії CLK. Інформацію подають на вхід DI ( вивід 4), вона фіксується по спаду тактуючих імпульсів на вході CLK ( вивід 3)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
10 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
11 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Таблиця 1.2.1 - Параметри зовнішнього тактового сигналу
Параметри Vcc=2,7...6,0
В
Vcc=4,0...6,0
В Од.вим. Мін. Макс. Мін. Макс. Частота
кварца 0 4 0 16 МГц Перехід
тактової частоти 250
62,5
нс Тривалість
“1” 40
16,7
нс Тривалість
“0” 40
16,7
нс Тривалість
фронта
10
4,15 нс
Таблиця 1.2.2 - Характеристика по постійній напрузі і струмові
Параметри Умови Мін. Тип.
Макс. Од. вим Вхідна
напруга низького рівня (Крім
XTAL1) -0,5 -
0,3Vcc B Вхідна
напруга високого рівня (Крім
XTAL1
і RESET) 0,7Vcc -
Vcc+0,5 B Вхідна
напруга високого рівня XTAL1
і RESET 0,7Vcc -
Vcc+0,5 B Вихідна
напруга низького рівня (Порти
B
і D) Lоl=25mA,
Vcc=5B Lol=15mA,
Vcc=3B - - 0,5
B Вихідна
напруга високого рівня (Порти
B
і D) L0H=-3mA,
Vcc=5B L0H=-3mA,
Vcc=3B Vcc-0,5 - - В Вихідний
струм
(Порти В і D) Vcc=5V,
V0H=4,5V
Vcc=3V,
V0H=2,7V - 4 - мА Поглинаючий
струм
(Порти В і D) Vcc=5V,
Vol=0,5V
Vcc=3V,
Vol=0,3V - 28 11 - мА |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
12 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Контролер встановлюється в вихідне положення автоматично при включенні живлення. При високому рівні на вході MCLR контролер заходиться в робочому стані. Програма передбачає також автоматичний перехід контролера у вихідний стан при зависанні, для цього використовується вмонтований сторожовий таймер. В приладі використовується дисятирозрядний жидкокристалічний модуль індекатор, оснащений контролером HT1613 фірми Holtek з послідовною загрузкою інформації по лінії DI і синхронізацією по лінії CLK. Інформацію подають
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
13 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
14 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 010. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
15 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
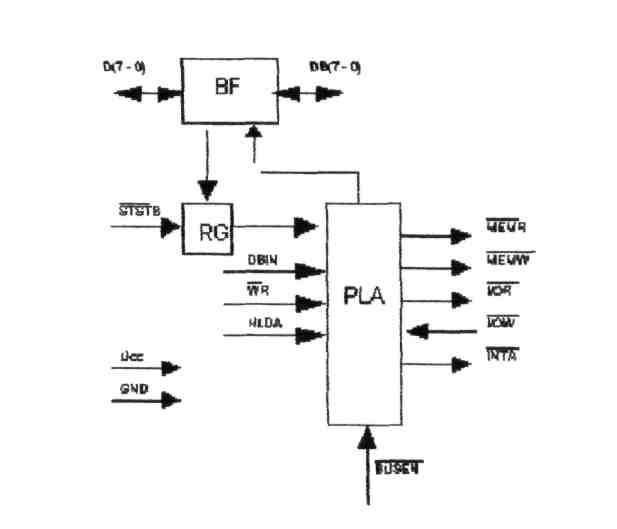
2 Спеціальний розділ 2.1 Вибір і обґрунтування елементної бази Системний контролер і шинний формувач КР580ВК28. Системний контролер і шинний формувач КР580ВК28 призначено для фіксації слова-стану МП, вироблення системних керуючих сигналів, буферизації шини даних МП і керування напрямком передачі даних. Структурна схема системного контролера і шинного формувача (СКФ) приведена на рис. 2.1.1. До складу СКФ входять: шинний формувач-підсилювач (BF), що забезпечує збільшення навантажувальної здатності системної інформаційної шини; регістр (RG) для запису і збереження слова-стану МП; комбінаційна схема (PLA) для формування вихідних керуючих сигналів.
Рисунок 2.1.1 - Структурна схема системного контролера і шинного формувача (СКФ). Призначення вхідних, вихідних, вихідних і керуючих сигналів СКФ приведені при описі виводів мікросхеми в табл. 2.1.1.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
16 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Таблиця 2.1.1 - Опис виводів СКФ
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
17 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
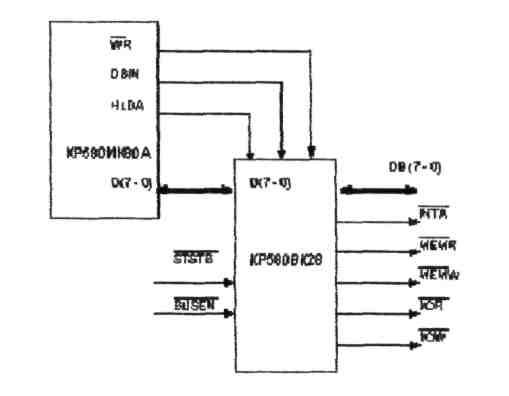
Підключення СКФ до МП наведено на рисунку 2.1.2.
Рисунок 2.1.2 - Схема підключення СКФ до МП По сигналу STSTB, що виробляється ГТІ, відбувається запис слова-стану в регістр збереження, а потім видача його на комбінаційну схему, що формує керуючі сигнали. Буферні регістри КР580ИР82 і КР580ИР83. Буферні регістри КР580ИР82 і КР580ИР83 являють собою 8-розрядні паралельні регістри з тристабільними виходами. Вони використовуються для реалізації схем фіксації, буферизації і мульти-плексування в мікропроцесорних системах на базі МП КР580ИК80А та К1810ВМ86. На виходах мікросхеми КР580ИР82 генеруються не інвертовані вхідні дані, а на виходах мікросхеми КР580ИР83 - інвертовані. Запис вхідних даних у буферні регістри виробляється при переході сигналу STB с Н-рівня в L-рівень. При Н-рівні сигналу ОЕ виходи буферних регістрів знаходяться у високоімпедансному стані.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
18 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
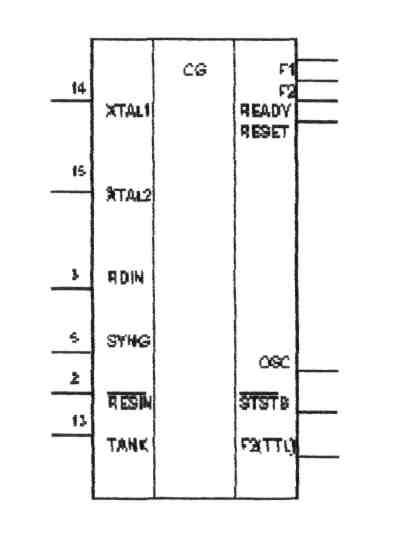
Генератор тактових сигналів КР580ГФ24. Мікропроцесорна інтегральна мікросхема КР580ГФ24 використовується як генератор тактових синхросерій F1 і F2 для мікропроцесора КР580ИК80А. Крім того, генератор виробляє сигнали початкової установки мікропроцесора RESET і готовності READY, які синхронізовані тактовими імпульсами, і строб STSTB, використовуваний для фіксації слова станів у системному контролері. На рисунку 2.1.2 приведене умовне позначення генератора тактових сигналів КР580ГФ24 на електричній схемі.
Рисунок 2.1.2 - Позначення КР580ГФ24 на схемі електричній принциповій. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
19 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
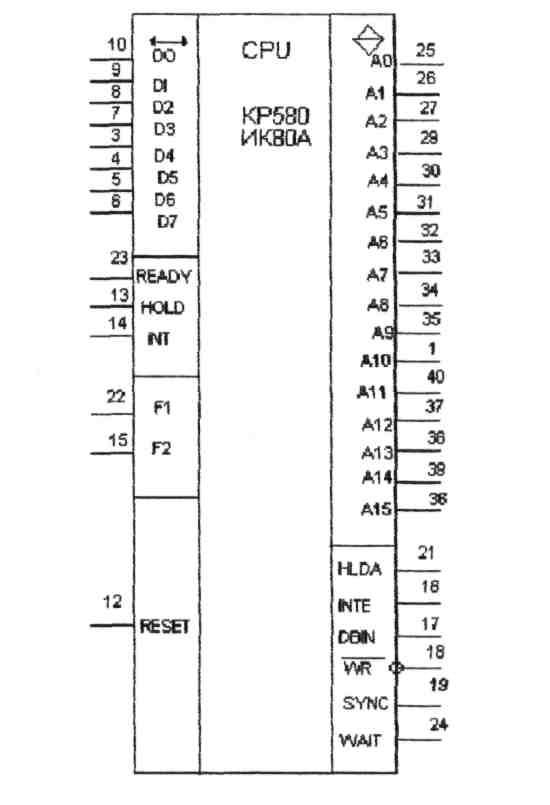
2.2 Принцип роботи окремих ВІС з використанням часових діаграм В серії К580 процесор разом з пристроєм керування реалізований у вигляді окремої ВІС і має фіксовані розрядність і систему команд, "зашиту" у ВІС МП. Схематичне зображення і позначення на електричній схемі приведене рисунку 2.2.1.
Рисунок 2.2.1 - Позначення мікропроцесора КР580ВМ80А на електричній схемі. Функціональне призначення виводів МП КР580ВМ80А приведено в таблиці 2.2.1.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
20 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Таблиця 2.2.1. Функціональне призначення виводів МП.
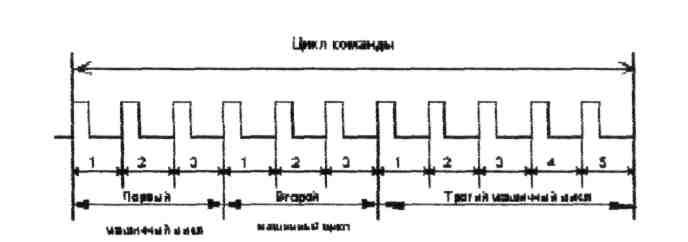
Цикл команд МП складається з машинних циклів, число яких для різних команд неоднакове і коливається в межах від одного до трьох. Машинний цикл потрібно кожного разу, коли ЦП звертається до пам'яті чи до порту вводу/виводу. На кожен байт обраної команди приділяється один машинний цикл, що містить три-п'ять тактів. На рис. 2.2.2 показаний цикл команди з трьома звертаннями до пам'яті, що складається з трьох машинних циклів.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
21 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
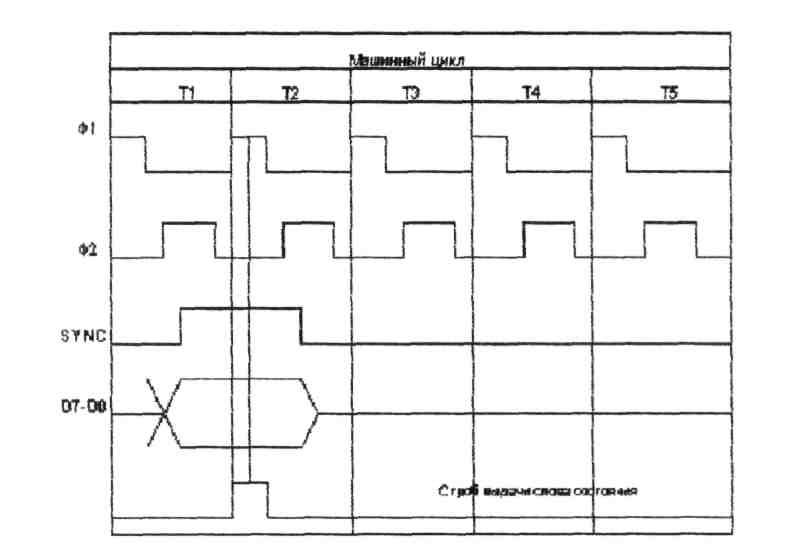
Рисунок 2.2.2 - Цикли і стани МП Спочатку кожного машинного циклу ЦП видає на шину даних вісім розрядів інформації, що характеризує стан внутрішніх вузлів МП. Ця інформація знаходиться на шині даних протягом дії сигналу SYNC, що завжди з'являється в першому такті будь-якого машинного циклу. Інформація про стан МП по сигналу стробу видачі слова стану записується в спеціальний зовнішній регістр стану і зберігається в ньому до появи наступного стробу, тобто протягом усього часу машинного циклу, що залишився. Строб видачі слова стану формується поза МП логічним перемножуванням сигналів Ф1 і SYNC, як показано на рисунку 2.2.3. Таким чином, шина даних протягом короткого проміжку часу використовується для видачі і запису в зовнішній регістр слова стану внутрішніх вузлів МП, в інший час – за своїм прямим призначенням.
Рисунок 2.2.3 - Видача слова стану внутрішніх вузлів МП |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
22 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Здавалося б природним для видачі інформації про стан МП використовувати додаткові висновки, аналогічні тим, що використовуються для видачі сигналів WR, DBIN, SYNC і ін., однак припустиме число виводів, що підключаються до одного кристала ІМС, дуже обмежено. Штучне мультиплексування шини даних дозволяє зменшити число виводів МП. Інформація про стан внутрішніх вузлів МП показує, які дії будуть виконуватися протягом поточного машинного циклу. Існує 10 різновидів машинних циклів і відповідних їм різних слів стану МП, приведених у табл. 2.2.2, де кожен розряд слова формує відповідний сигнал. Назви і призначення цих сигналів зазначені в табл. 2.2.З. Таблиця 2.2.2. Значення розрядів слова стану МП для різних машинних циклів.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
23 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Таблиця 2.2.3. Призначення розрядів слова стану МП.
Формування керуючих сигналів. Взаємодія МП із пам'яттю і пристроями введення-виведення здійснюється по сигналах шини керування. Частина сигналів надходить на цю шину безпосередньо. Інша частина сигналів, такі як I/OR, I/OW, MEMR, MEMW, формується відповідно до інформації, збереженої в регістрі слова стану fPSWY. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
24 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3 Експлуатаційний розділ 3.1 Ініціалізація програмуємих ВІС Програма ініціалізації мікросхем виконує налагодження портів вводу-виводу мікросхем та встановлює параметри дільника та входів мікросхеми по яким буде виконуватися переривання. Також налагоджуються переривання по таймеру. Всі інші переривання забороняються. Програму тестування та програму ініціалізації ВІС приведено в пункті 3.2. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
25 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.2 Тест перевірки окремих вузлів або пристрою Тест-програма перевірки роботи модуля процесора написана мовою асемблера МП 8080. ORG 0000Н; Початок MVI А, 90Н; Програмування OUT 08Н; ПШ IN 05H; Читання інф. з порту А STA 0800Н; Запис у комірку пам'яті XRA А; Очищення А LXI Н,0800Н; Початок ОЗП MVI А,55Н; в А 01010101 Ml: MOV М, А; Записати в пам'ять INX Н; На наступний адресу ОЗП MOV C, А; Зберегти А MOV A, H; Значення Н в А CPI 1 OH; Кінець ОЗП MOV A, C; JNZ Ml; Якщо ні, йти на Ml LXI H,0800H; Початок ОЗП М2: CMP M; JNZ M3; Указати на помилку INХ Н; Збільшити адресу MOV С,А; MOV А,Н; СРІ ІОН; Кінець ОЗП MOV А,С; JNZ М2; Якщо ні, йти на М2 HLT Кінець програми
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
26 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Таблиця 3.2.1 - Тест-таблиця для налагодження МП модуля в покроковому режимі.
Хоча модуль і здається простим, наявність у ньому тісного взаємозв'язку між апаратними засобами і програмним забезпеченням приводить до того, що навіть незначна несправність у апаратурі або в програмному забезпеченні приводить до непрацездатності мікро-ЕОМ. Почати налагодження мікро-ЕОМ доцільно з перевірки омметром усіх зв'язків на монтажній платі й усунення виявлених дефектів монтажу. З особливою старанністю варто перевірити наявність |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
27 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
електричних зв'язків між виводами живлення мікросхем і контактами джерела живлення. Щупами омметра необхідно торкатися безпосередньо виводів мікросхем - це допоможе знайти дефекти пайки. Потім перевіряють наявність живлячої напруги на виводах мікропроцесора і на інших мікросхемах модуля. Наступний етап - перевірка схеми формування синхроімпульсів. Для цього буде потрібно осцилограф. Переконавши в наявності синхроімпульсів Ф1 і Ф2 на виводах мікропроцесора, переходять до перевірки функціонування блоку центрального процесора при постійно діючій на шині даних команді NOP (00Н). Код команди 00 примусово подають на шину даних за допомогою перемичок. При цьому на адресній шині повинний відбуватися послідовний перебір всіх адрес, який можна проконтролювати за допомогою осцилографа. Сигнали на адресній шині в цьому випадку мають форму симетричних прямокутних імпульсів, причому частота імпульсів зменшується вдвічі при збільшенні номера розряду на одиницю. При правильній роботі команди NOP переходять до перевірки інших блоків мікро-ЕОМ. Для цього вивід 3 мікросхеми DD2 з'єднують із загальним проводом і переконуються в наявності високого рівня на виводі 24 мікропроцесора, що свідчить про перебування його в стані очікування. Натиснувши на кнопку «УСТ» перевіряють на всіх лініях шини адреси нульового рівня, а на лініях шини даних двійкового коду 0011 1110, записаного в нульовому осередку (мікросхема ПЗП). Вставляють у панельку мікросхему ПЗП. Збирають на окремій платі вузол, за допомогою якого перевіряють поциклове виконання тест-програми мікропроцесором. При однократному натисканні на |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
28 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
кнопку «КРОК» мікропроцесор переходить у стан очікування, що дозволяє на індикаторах логічного пробника контролювати читання з ПЗП кодів і їх виконання. Для виключення впливу сигналу переривання провід від виводу 14 мікропроцесора DD1 відключають. Натиснувши на кнопку «УСТ» і послідовно натискаючи кнопку «КРОК», контролюють виконання перших команд Тест-програми відповідно до Тест-таблиці 3.2.1 При виявленні невідповідностей варто перевірити чи нема замикання між лініями шини адреси, або шини даних, або іншими сигнальними лініями. Після усунення виявлених несправностей, домігшись виконання перших команд тесту в кроковому режимі, додатковий вузол відключають. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
29 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3 Принцип роботи пристрою згідно схеми електричної принципової Блок процесора містить у собі МП ВІС D3, генератор тактових імпульсів D2, системний контролер D6, підсилювачі MA D4 і D5, підсилювач сигналів МП ВІС D7. Клавіша SB1 служить для подачі сигналу початкової установки МП ВІС, тривалість якого визначається ланцюгом R2, С2. Діод VD1 дозволяє здійснити швидкий розряд С2 навіть при короткочасному зникненні живлячої напруги. Ланцюг СІ, BQ1 задає частоту генератора тактових імпульсів. Набори резисторів Е1 ...ЕЗ служать для узгодження сигналів МА і МД. Виходи IMC D4, D5, D6 переводяться в третій стан при захопленні магістралей по сигналу КГЕК, що виробляється елементом D1. Резистор забезпечує високий рівень на вході D1 при відсутності в системі модуля з контролером ПДП, що виробляє сигнал BUSEN. Блок запам'ятовуючих пристроїв містить ПЗП і схему дешифрації адреси. Дешифратор адреси формує сигнали вибірки CS1 для ПЗП в такому вигляді: ПЗП з 0000Н по 07FFH. Блок дешифрації адреси ПВВ видає вісім стробіруючих імпульсів низького рівня для регістрів введення і виведення мікро-ЕОМ. Формування здійснює ПЗП D30, що дешифрує чотири молодших розряди МА і сигнал запису в ПВВ. ПЗП відмикається по сигналу з логічної схеми D27...D29. Елементом D27 схеми виконується дешифрація інших розрядів адреси, а елемент D28 служить для одержання сигналу звертання до ПВВ (читання чи запису). Для заборони роботи ПВВ мікро-ЕОМ під час циклів заборони роботи ПВВ мікро-ЕОМ під час циклів ПДП служить сигнал BUSEN. За допомогою перемикача SA4 можна також відключати ПВВ мікро-ЕОМ. Імпульс, що відмикає, для ПЗП D30 формується елементом D29 при надходженні на його входи високих рівнів. Резисторна матриця служить навантаженням виходів з відкритим колектором ПЗП, а резистори R18. R19 формують високі рівні. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
30 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3.3 Розрахунок надійності пристрою Надійність – властивість пристрою виконувати задані функції в заданих режимах і умовах застосування, обслуговування, ремонту, збереження, транспортування на протязі необхідного інтервалу часу. Показники надійності:
Безвідмовність – властивість безупинно зберігати працездатність до граничного стану, після настання, якого подальша експлуатація виробу економічно недоцільна. Ремонтопридатність – пристосованість пристрою до попередження відмовлень, до можливості виявлення та усунення несправностей шляхом проведення ремонту і технічного обслуговування. До термінів ремонтопридатності відносяться: відмовлення, збереження. Відмовлення – подія, що полягає в повній або частковій утраті працездатності пристрою. Відмовлення бувають: Раптові (катастрофічні) – стрибкоподібна зміна параметрів робочого виробу. Поступові (параметричні) – постійна зміна одного або декількох параметрів з часом, що виходять за припустимі межі. Збереження – термін, протягом якого при дотриманні режимів збереження виріб зберігає працездатний стан.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
31 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Розрахунок надійності поділяється на три розділи:
Виконання розрахунків проходить наступним чином: 1. Інтенсивність відмовлення всіх елементів визначається за формулою:
де: ni – кількість елементів у схемі; i – інтенсивність відмовлень і-го елемента; m – кількість типів елементів. При розрахунку також потрібно враховувати інтенсивність відмовлень через пайки радіоелементів на друкованій платі. Інтенсивність відмовлень елементів розраховуємо за формулою:
де: о – інтенсивність відмовлень елементів у режимі номінального навантаження; Кe – експлуатаційний коефіцієнт; Кр – коефіцієнт навантаження. Усі ці параметри беруться з довідника з розрахунку надійності. 2. Ймовірністю безвідмовної роботи називається ймовірність того, що за певних умов експлуатації в заданому інтервалі часу не відбудеться жодного відмовлення.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
32 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ймовірність безвідмовної роботи визначається за формулою:
де:
t – час, (год). За результатами розрахунків складається таблиця і графік. 3. Середній наробіток до першого відмовлення – це час роботи пристрою до першої відмови. Середній наробіток на відмовлення визначається за формулою:
Розрахунок надійності пристрою приведено далі.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
33 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
34 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
35 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Анотація В курсовому проекті розроблена схема електрична принципова процесорного модуля з використанням мікропроцесора КР580ВМ80А. В роботі використана велика кількість схем, що дозволяють розглянути кожну частину пристрою окремо, а також програма перевірки процесорного модуля, що дає можливість перевірити правильність роботи процесорного модуля. В роботі представлено розрахунок надійності пристрою. Виконання даної курсового проекту змусило повторити та закріпити вивчений протягом навчального року матеріал з предмету «Мікропроцесорні системи», а також звернутися до додаткової літератури та вивчити багато нового. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
36 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Література
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
РК КНЕУ. КП. 5.091504. 009. ПЗ |
Аркуш
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
37 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Змін |
Аркуш |
№ документа |
Підпис |
Дата |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||