Samoylova / vika_12a
.docx
To get started, select MATLAB Help or Demos from the Help menu.
>> To get started, select MATLAB Help or Demos from the Help menu.
clear all
format long
disp('Решаем пример 12a')
nf = 10; % число интервалов разбиения
syms x y Dy D2y % описали символические переменные
Решаем пример 12a
F=2*Dy^2+2*y^2+y*cos(x)-5*x;% подинтегральная функция
x1=0; y1=2; x2=2; y2=2;
fprintf('Подынтегральная функция: F=%s\n',char(F))
fprintf('Граничные условия: y(%d)=%d; y(%d)=%d\n',x1,y1,x2,y2)
dFdy = diff(F,y);
dFdy1 = diff(F,Dy);
d_dFdy1_dx = diff(dFdy1,x);
d_dFdy1_dy = diff(dFdy1,y);
d_dFdy1_dy1 = diff(dFdy1,Dy); % d(dF/dy')/dy'
dFy1dx = d_dFdy1_dx + d_dFdy1_dy*Dy + d_dFdy1_dy1*D2y;
Euler = simple(dFdy-dFy1dx);
deqEuler = [ char(Euler) '=0' ]; % составили уравнение
Sol = dsolve(deqEuler,'x'); % решаем уравнение Эйлера
if length(Sol)~=1 % решений нет или более одного
error('Нет решений или более одного решения!');
end
SolLeft = subs(Sol,x,sym(x1));
SolRight = subs(Sol,x,sym(x2));
EqLeft = [char(SolLeft) '=' char(sym(y1))];
EqRight = [char(SolRight) '=' char(sym(y2))];
Con = solve(EqLeft,EqRight); % решаем систему
C1 = Con.C1;
C2 = Con.C2;
Sol1a = vpa(eval(Sol),14);
xpl = linspace(x1,x2);
y1a = subs(Sol1a,x,xpl);
Подынтегральная функция: F=2*Dy^2+2*y^2+y*cos(x)-5*x
Граничные условия: y(0)=2; y(2)=2
syms xim1 xi xip1 yim1 yi yip1
dx = sym((x2-x1)/nf)
dFdyP = subs ( dFdy, {x,y,Dy}, {(xim1+xi)/2, (yim1+yi)/2, (yi-yim1)/dx});
dFdyN = subs ( dFdy, {x,y,Dy}, {(xi+xip1)/2,(yi+yip1)/2,(yip1-yi)/dx});
dFdy1P = subs ( dFdy1, {x,y,Dy}, {(xim1+xi)/2,(yim1+yi)/2,(yi-yim1)/dx});
dFdy1N = subs ( dFdy1, {x,y,Dy}, {(xi+xip1)/2,(yi+yip1)/2,(yip1-yi)/dx});
EqF = simple((dFdyN+dFdyP)/2-(dFdy1N-dFdy1P)/dx)
dx =
1/5
EqF =
202*yi-99*yip1+1/2*cos(1/2*xi+1/2*xip1)-99*yim1+1/2*cos(1/2*xim1+1/2*xi)
neq = nf-1 % количество уравнений
edx = eval(dx) % шаг сетки
xiC=[x1+edx:(x2-x1-2*edx)/neq:x2-edx]'; % текущая точка
xiP=xiC-edx;
xiN=xiC+edx; % предыдущая и последующая точки
e0 = subs(EqF,{xim1,xi,xip1,yim1,yi,yip1},{xiP,xiC,xiN,0,0,0} ); % своб. члены
e0 = ones(neq,1).*e0; % если скаляр, сделали вектором
eiP = subs ( EqF, {xim1,xi,xip1,yim1,yi,yip1}, {xiP,xiC,xiN,1,0,0} ) - e0;
eiC = subs ( EqF, {xim1,xi,xip1,yim1,yi,yip1}, {xiP,xiC,xiN,0,1,0} ) - e0;
eiN = subs ( EqF, {xim1,xi,xip1,yim1,yi,yip1}, {xiP,xiC,xiN,0,0,1} ) - e0;
b = -eval(e0); % правые части
A = diag(eval(eiC)) + diag(eval(eiN(1:neq-1)),1) + diag(eval(eiP(2:neq)),-1);
b(1) = b(1)-eiP(1)*y1; % учли граничные условия
b(neq) = b(neq)-eiN(1)*y2;
y = A\b; % решаем систему
x12a = linspace(x1,x2,nf+1); % абсциссы
y12a = zeros(nf+1,1);
y12a(2:nf) = y; % решение
y12a(1) = y1;
y12a(nf+1) = y2; % граничные условия
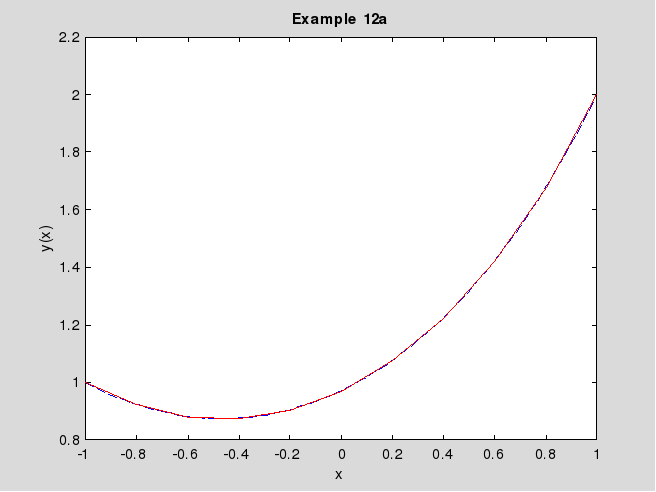
plot(xpl,y1a,'--b',x12a,y12a,'-r')
title ( '\bfExample 12a' ) % заголовок
xlabel('x')
ylabel('y(x)') % ось OY