

6.3. Электроприводы постоянного тока с широтно-импульсным регулированием
Развитие силовой преобразовательной техники, прежде всего силовых транзисторов с изолированным затвором (IGBT – биполярные транзисторы с изолированным затвором) открыло широкие возможности создания регулируемых источников постоянного напряжения (тока), которые находят широкое применение в электроприводах постоянного тока.
Основные достоинства IGB-транзисторов: высокие параметры силовой цепи (напряжение – до 1500В, ток до 500А с возможностью параллельной работы), малая мощность управления; высокая частота переключений – десятки кГц; модульная конструкция, объединяющая транзистор, быстродействующий обратный диод и элементы цепей управления и защиты, - делают эти приборы идеальными ключами, позволяющими с высокой частотой производить коммутацию электрических цепей.
Рис.6.17.
Схема электропривода постоянного тока
с широтно-импульсным регулятором
напряжения Принцип ра-боты привода
с двигателем по-стоянного тока независимого
возбуждения и транзисторным
широтно-им-пульсным регулятором
напряжения уясняется из рассмотрения
схемы рис.6.17.
Принцип ра-боты привода
с двигателем по-стоянного тока независимого
возбуждения и транзисторным
широтно-им-пульсным регулятором
напряжения уясняется из рассмотрения
схемы рис.6.17.
В
этой схеме якорная цепь двигателя
периодически подключается к источнику
питания постоянного тока (неуправляемый
выпрямитель UZ),
имеющего постоянную величину напряжения
UП.
Включение – отключение напряжения
питания осуществляется ключом –
транзистором VT.
Частота коммутаций цепи постоянная,
равная
![]() .
.
Величина
среднего напряжения, поступающего к
якорю двигателя, определяется отношением
времени включенного состояния ключа
tв
ко времени периода коммутаций
![]() ,
как это показано на рис.6.18. Если время
включенного состояния велико и составляет
порядка
,
как это показано на рис.6.18. Если время
включенного состояния велико и составляет
порядка![]() ,
то среднее напряжение, поступающее на
двигатель, будет максимально и составлять
,
то среднее напряжение, поступающее на
двигатель, будет максимально и составлять![]() .
Если уменьшать время включенного
состояния ключаVT,
то среднее значение напряжения будет
уменьшаться (оно пропорционально
заштрихованной площади на рис.6.18,
деленной на время Тк).
.
Если уменьшать время включенного
состояния ключаVT,
то среднее значение напряжения будет
уменьшаться (оно пропорционально
заштрихованной площади на рис.6.18,
деленной на время Тк).
Из рис.6.18 следует, что среднее напряжение широтно-импульсного регулятора равно
![]() .
(6.22)
.
(6.22)
Величину
![]() называют скважностью импульсов.
называют скважностью импульсов.

П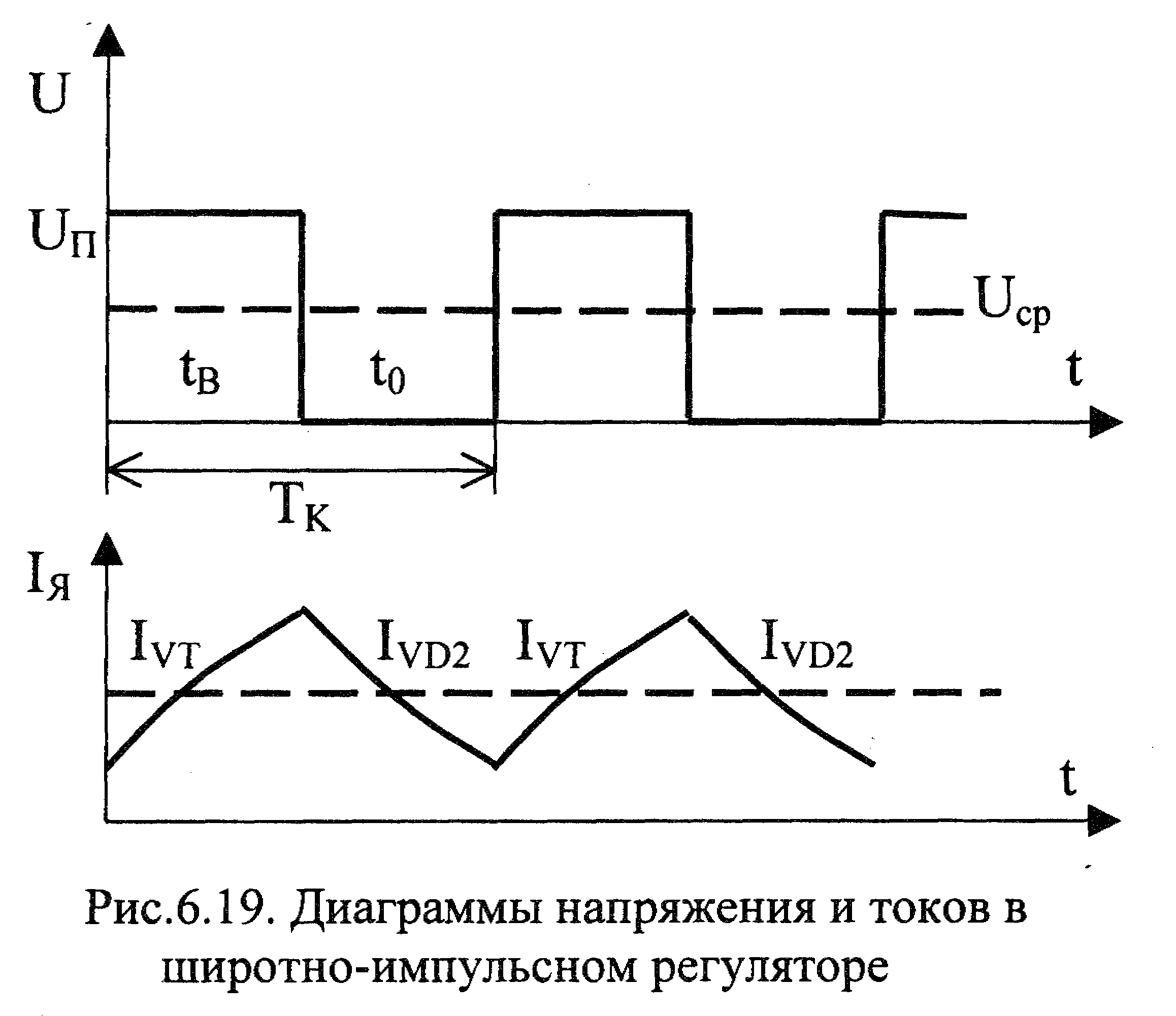 ри
размыкании ключаVT
ток в якорной цепи двигателя прекратится
мгновенно не может, т.к. цепь якоря
обладает значительной ин-дуктивностью.
Поэтому после отключения VT
ток будет под действием э.д.с. самоиндукции
обмотки якоря протекать через шунтирующий
диод VD2.
Переход тока якоря от транзистора VT
к диоду VD2
иллюстрируется ди-аграммами,
представлен-ными на рис.6.19. Вели-чина
пульсаций тока зави-сит от частоты
коммутаций ωк
– чем выше
частота, тем меньше амплитуда пульсаций.
В настоящее время широтно-импульсные
регуляторы (ШИР) проектируются с частотой
2-10кГц и более. При высоких частотах
амплитуды пульсаций тока будут
незначительными и существенно меньше,
чем при использовании тиристорных
преобразователей с импульсно-фазовым
управлением, питающихся от промышленной
сети напряжением частотой 50Гц.
ри
размыкании ключаVT
ток в якорной цепи двигателя прекратится
мгновенно не может, т.к. цепь якоря
обладает значительной ин-дуктивностью.
Поэтому после отключения VT
ток будет под действием э.д.с. самоиндукции
обмотки якоря протекать через шунтирующий
диод VD2.
Переход тока якоря от транзистора VT
к диоду VD2
иллюстрируется ди-аграммами,
представлен-ными на рис.6.19. Вели-чина
пульсаций тока зави-сит от частоты
коммутаций ωк
– чем выше
частота, тем меньше амплитуда пульсаций.
В настоящее время широтно-импульсные
регуляторы (ШИР) проектируются с частотой
2-10кГц и более. При высоких частотах
амплитуды пульсаций тока будут
незначительными и существенно меньше,
чем при использовании тиристорных
преобразователей с импульсно-фазовым
управлением, питающихся от промышленной
сети напряжением частотой 50Гц.
Среднее
напряжение, поступающее на якорную цепь
двигателя, будет равно
![]() и, следовательно, механические
характеристики электропривода в данной
схеме будут описываться выражением
и, следовательно, механические
характеристики электропривода в данной
схеме будут описываться выражением
![]() .
.
Заметим, что величина скважности γ может изменяться от 0 до 0,95. Величина Uп зависит от схемы выпрямления. При достаточно мощном фильтровом конденсаторе она приближается к амплитудному значению линейного напряжения переменного тока.
Механические характеристики нереверсивного привода постоянного тока независимого возбуждения с ШИР регулятором напряжения аналогичны характеристикам на рис.6.13.
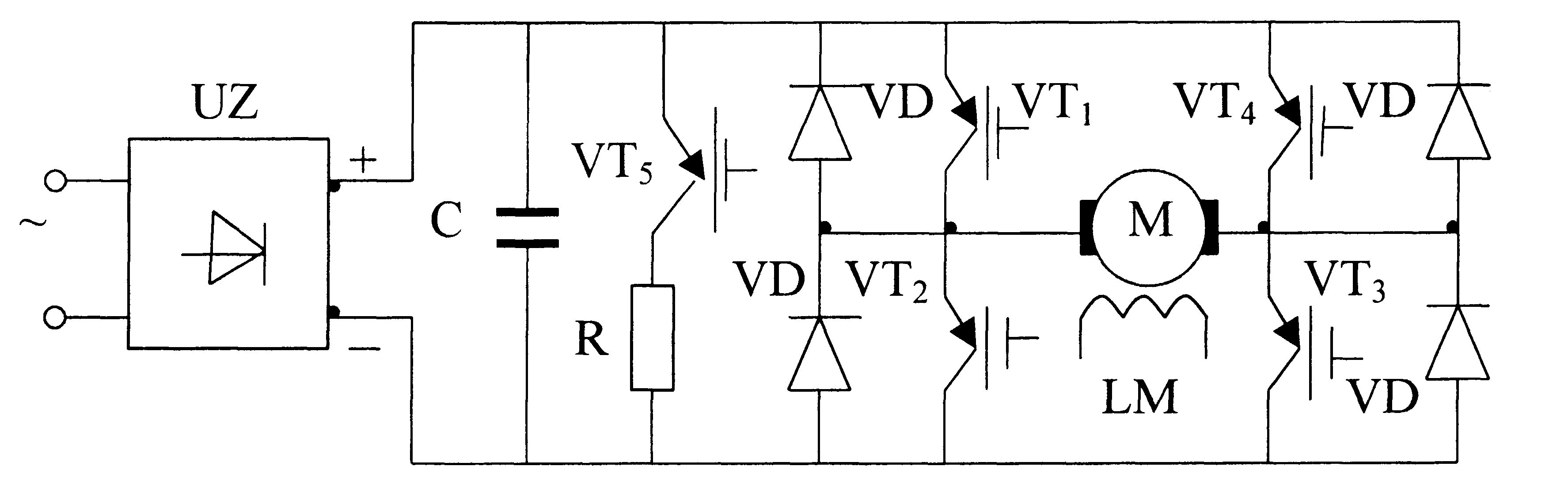
Рис.6.20. Схема реверсивного электропривода постоянного тока с широтно-импульсным регулятором напряжения
Важным достоинством схем с широтно-импульсным регулированием напряжения является то, что на входе преобразователя устанавливается неуправляемый выпрямитель, вследствие чего его cosφ1 (по первой гармонике) близок к единице, а коэффициент мощности будет не ниже 0,95.
Для реализации реверсивного привода с ШИР-регулятором напряжения используется мостовая схема включения силовых транзисторных ключей, показанная на рис.6.20. В этой схеме якорь двигателя включен в диагональ моста ключей VT1÷VT4. Протекание тока в одном направлении происходит через транзисторные ключи VT1-VT3, в другом – через ключи VT2-VT4. Для обеспечения непрерывности тока служат диоды VD.
 Широтно-импуль-сное
регулирование напряжения может в данной
схеме про-изводиться двумя способами:
первый аналогичен рассмо-тренному для
нере-версивных схем (рис.6.18), второй
предусматривает двуполярную ком-мутацию
за время каждого периода заданной
тактовой частоты (рис.6.21). В последнем
случае в течение времени tв
включены
ключи VT1 и
VT3,
а в течение времени (Тк-tв)
включены ключи VT2
и VT4.
Среднее напряжение на нагрузке (якорной
цепи двигателя) будет пропорционально
разности заштрихованных площадей. Когда
Широтно-импуль-сное
регулирование напряжения может в данной
схеме про-изводиться двумя способами:
первый аналогичен рассмо-тренному для
нере-версивных схем (рис.6.18), второй
предусматривает двуполярную ком-мутацию
за время каждого периода заданной
тактовой частоты (рис.6.21). В последнем
случае в течение времени tв
включены
ключи VT1 и
VT3,
а в течение времени (Тк-tв)
включены ключи VT2
и VT4.
Среднее напряжение на нагрузке (якорной
цепи двигателя) будет пропорционально
разности заштрихованных площадей. Когда
![]() напряжение положительно, когда
напряжение положительно, когда![]() оно равно нулю; когда
оно равно нулю; когда![]() среднее напряжение отрицательно.
Недостатком данного алгоритма ШИР
является необходимость предусматривать
некоторую паузу при переключении ключей.
среднее напряжение отрицательно.
Недостатком данного алгоритма ШИР
является необходимость предусматривать
некоторую паузу при переключении ключей.
Величина среднего напряжения при двухполярной коммутации будет:
![]() ,
,
где:
![]() - отношение времени включенного состояния
ключей TV1-TV3
ко времени периода.
- отношение времени включенного состояния
ключей TV1-TV3
ко времени периода.
Применяется также комбинированный алгоритм коммутации, когда при значениях U<0,5Uп производится двуполярная коммутация, а при U>0,5Uп – однополярная, или когда на части периода Тк открыты ключи VT2-VT4, на части все ключи закрыты.
В схемах с широтно-импульсными регуляторами и нерегулируемым источником постоянного тока режим рекуперативного торможения невозможен. Поэтому для приводов небольших мощностей используется режим противовключения с ограничением тока якоря величиной скважности. Энергия торможения расходуется в якорной цепи двигателя, вызывая нагрев обмоток. Возможен режим динамического торможения, когда якорная цепь двигателя замыкается на тормозной резистор R через транзисторный ключ VT5.