

Основные показатели схем выпрямления
|
Схема |
|
|
|
|
|
m |
|
Однофазная мостовая |
0,9 |
1,57 |
1,0 |
1,11 |
1 |
2 |
|
Трехфазная мостовая |
1,35 |
1,045 |
0,815 |
1,045 |
2 |
6 |
I1 – ток в линии на стороне переменного тока;
Sт – мощность трансформатора, Вт;
Uвмакс – максимальное напряжение, прикладываемое к тиристорам;
Rm – сопротивление вторичной обмотки трансформатора (или реактора).
Таким образом, среднее значение напряжения преобразователя в режиме непрерывного тока (внешняя характеристика преобразователя, как источника напряжения) будет:
![]() . (6.16)
. (6.16)
Выпрямленный
ток имеет непрерывный характер, если
индуктивность в цепи выпрямленного
тока достаточно велика
![]() .
.
Индуктивность якорной цепи двигателя постоянного тока независимого возбуждения может быть определена по формуле:
![]() ,
,
где: кL – конструктивный коэффициент; для компенсированных машин принимается (0,1÷0,25), для некомпенсированных (0,5÷0,6);
Uн, Iн, ωн – номинальные напряжение, ток якоря и угловая скорость двигателя;
рп – число пар полюсов.
При конечных значениях индуктивности в цепи выпрямленного тока на условие непрерывности тока оказывают также влияние минимальное значение тока и угол регулирования. Граничное (минимальное) значение тока, при котором ток еще остается непрерывным определяется соотношением [1-6]
![]() .
(6.17)
.
(6.17)
Влияние режима прерывистого тока проявляется в увеличении среднего значения выпрямленного напряжения в зоне прерывистого тока.
Наиболее применяемые силовые схемы тиристорного электропривода постоянного тока (ТП-Д) показаны на рис.6.10. Схемы 6.10а и 6.10б относятся к нереверсивным электроприводам. В этих схемах изменение полярности питающего напряжения и направления тока в якорной цепи невозможно. Механические характеристики нереверсивного привода ТП-Д показаны на рис.6.13.
Если
полагать, что привод работает в режиме
непрерывного тока (при
![]() ),
то механические характеристики будут
иметь вид наклонных прямых параллельных
друг другу, причем ω0
уменьшается по мере уменьшения
выпрямленного напряжения (увеличения
угла α).
),
то механические характеристики будут
иметь вид наклонных прямых параллельных
друг другу, причем ω0
уменьшается по мере уменьшения
выпрямленного напряжения (увеличения
угла α).
Механические характеристики описываются в этом случае следующей формулой, полученной на основе (6.4), (6.16).
![]() (6.18)
(6.18)
П Рис.6.13.
Механические характеристики нереверсивного
привода ТП-Д
При желании уменьшить зону прерывистых токов последовательно с якорем двигателя включают сглаживающий дроссель, величина индуктивности которого может быть определена по формуле:
![]() ,
,
где Idг – требуемое значение граничного тока при ω=0.
Заметим, что механические характеристики нереверсивного привода ТП-Д не переходят ось ординат, т.к. изменение направления тока в нереверсивных схемах невозможно. Следовательно, отсутствует режим рекуперативного торможения. В случае необходимости изменения направления вращения приводного двигателя в нереверсивных приводах по системе ТП-Д изменяют направление тока в обмотке возбуждения двигателя.
Рекуперация энергии торможения в нереверсивных приводах
Т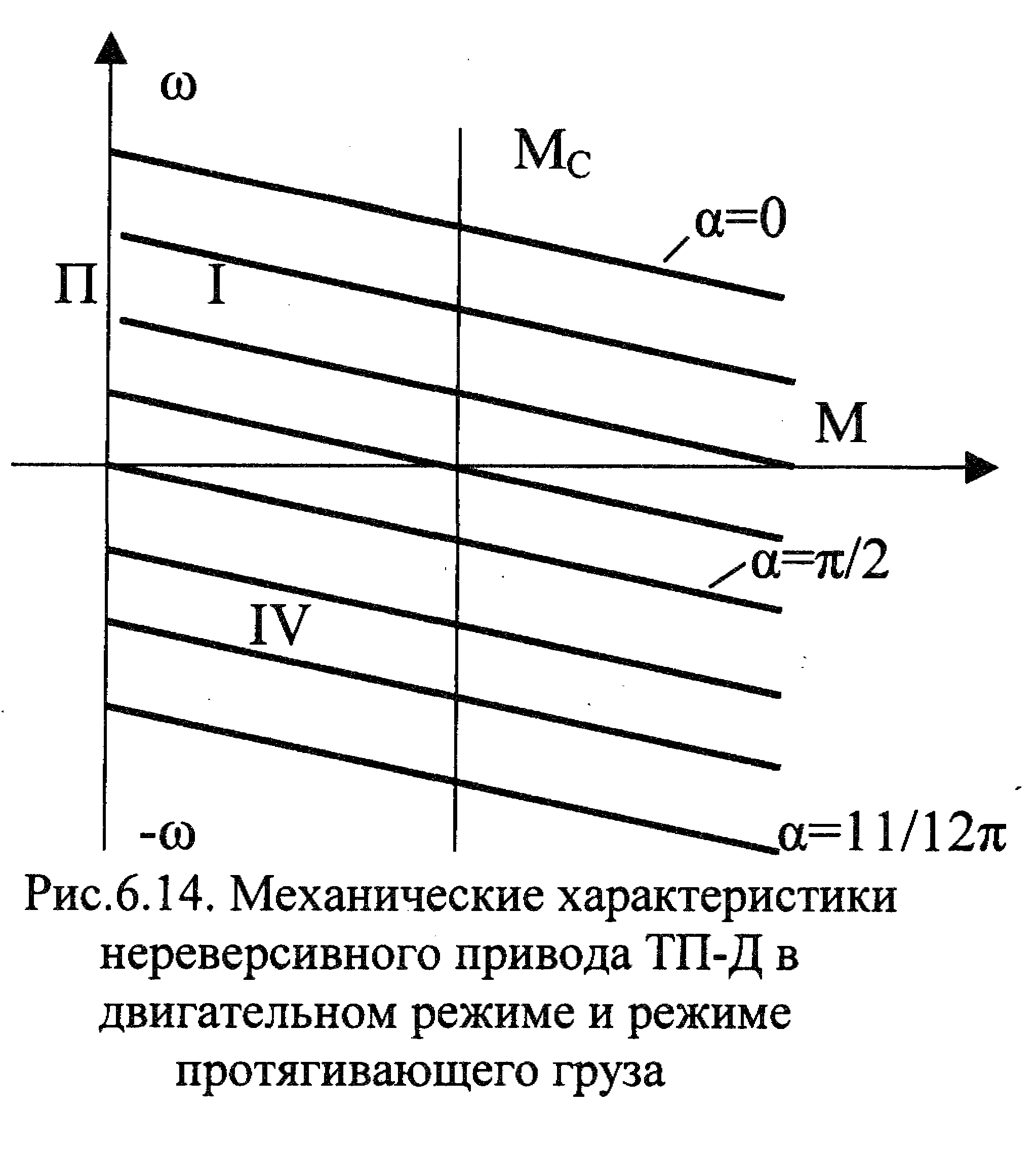 П-Д
возможна при работе привода вIV
квадранте в режиме протягивающего груза
(см.§2.5). Это своеобразный режим
противовключения, который возникает
тогда, когда привод включают в направлении
«вверх», а под действием активного
статического момента (спуск груза)
привод будет вращаться в обратном
направлении. При этом э.д.с. двигателя
Ея
изменит свой знак. Если при этом
нере-версивный преобразователь перевести
в инверторный режим, установив углы
управления тиристорами
П-Д
возможна при работе привода вIV
квадранте в режиме протягивающего груза
(см.§2.5). Это своеобразный режим
противовключения, который возникает
тогда, когда привод включают в направлении
«вверх», а под действием активного
статического момента (спуск груза)
привод будет вращаться в обратном
направлении. При этом э.д.с. двигателя
Ея
изменит свой знак. Если при этом
нере-версивный преобразователь перевести
в инверторный режим, установив углы
управления тиристорами
![]() ,
то под дей-ствием э.д.с. якоря ток бу-дет
протекать против сред-ней э.д.с.
преобразователя, и энергия торможения
бу-дет отдаваться в питающую сеть.
Механические харак-теристики,
соответствую-щие этому режиму, показаны
на рис.6.14.
,
то под дей-ствием э.д.с. якоря ток бу-дет
протекать против сред-ней э.д.с.
преобразователя, и энергия торможения
бу-дет отдаваться в питающую сеть.
Механические харак-теристики,
соответствую-щие этому режиму, показаны
на рис.6.14.
Для того, чтобы получить электропривод, работающий во всех четырех квадрантах поля М-ω, необходимо использование реверсивного тиристорного преобразователя, обеспечивающего протекание тока якоря в обоих направлениях. Реверсивные тиристорные преобразователи содержат две группы тиристоров, включенные встречно-параллельно друг другу.
Наиболее распространенная схема реверсивного тиристорного электропривода показана на рис.6.10в. В этой схеме два тиристорных преобразователя UZ(B) и UZ(H), собранные каждый по трехфазной мостовой схеме, включены параллельно друг другу с противоположной полярностью на стороне выпрямленного тока. Подавать опирающие импульсы одновременно на обе группы тиристоров нельзя, т.к. произойдет короткое замыкание. Поэтому в данной схеме может работать только одна группа тиристоров UZ(B) или UZ(H); другая группа должна быть закрыта (отпирающие импульсы сняты). Такая реверсивная схема называется схемой с раздельным управлением группами тиристоров.
При раздельном управлении включается только та группа тиристоров, которая в данный момент должна проводить ток. Выбор этой группы зависит от направления движения привода («вперед» или «назад») и от режима работы: двигательный режим или рекуперативного торможения. В соответствии с этим выбор нужной группы вентилей можно представить в виде таблицы.
Таблица 6.2.
|
Направление движения |
Двигательный |
Тормозной |
|
Вперед |
UZ(B) |
UZ(H) |
|
Назад |
UZ(H) |
UZ(B) |
 Режим
работы
Режим
работы
В системах управления выбор и включение нужной группы тиристоров производится автоматически посредством логического переключающего устройства ЛПУ, принцип построения которого показан на рис.6.15.
Примем
направление тока якоря при работе
«вперед» в двигательном режиме за
положительное. При положительном сигнале
задания скорости ωзад,
соответствующем движению вперед, и
сигнале ошибки по скорости, которая в
двигательном режиме также будет
![]() ,
сигнал, поступающий на ЛПУ от регулятора
тока, будет иметь знак (+). В соответствии
с этим ЛПУ включит электронный ключ
К(В), который подает отпирающие импульсы
на тиристорную группуUZ(B).
Угол управления αВ
устанавливается системой автоматического
регулирования в соответствии с сигналом
выхода регулятора тока РТ. Обе СИФУ (В)
и (Н) работают согласованно – так, что
сумма углов
,
сигнал, поступающий на ЛПУ от регулятора
тока, будет иметь знак (+). В соответствии
с этим ЛПУ включит электронный ключ
К(В), который подает отпирающие импульсы
на тиристорную группуUZ(B).
Угол управления αВ
устанавливается системой автоматического
регулирования в соответствии с сигналом
выхода регулятора тока РТ. Обе СИФУ (В)
и (Н) работают согласованно – так, что
сумма углов
![]() .
(6.19)
.
(6.19)

Таким
образом, на тиристорную группу, работающую
в выпрямительном режиме, подаются
отпирающие импульсы с углом
![]() .
При этом СИФУ(Н) вырабатывает импульсы
управления с углом
.
При этом СИФУ(Н) вырабатывает импульсы
управления с углом![]() (с запасом по углу в диапазоне
(с запасом по углу в диапазоне![]() ),
т.е. углом управления, соответствующем
инверторному режиму работы преобразователяUZ(H).
Однако, поскольку электронный ключ К(Н)
разомкнут, импульсы управления на
тиристоры группы UZ(H)
не поступают. Преобразователь UZ(H)
закрыт, но подготовлен к работе в
инверторном режиме.
),
т.е. углом управления, соответствующем
инверторному режиму работы преобразователяUZ(H).
Однако, поскольку электронный ключ К(Н)
разомкнут, импульсы управления на
тиристоры группы UZ(H)
не поступают. Преобразователь UZ(H)
закрыт, но подготовлен к работе в
инверторном режиме.
Т акой
принцип согласованного управления,
определяемый (6.19) позволяет согласовать
механические характеристики привода
в двигательном и в тормозном режимах,
что показано на рис.6.16.
акой
принцип согласованного управления,
определяемый (6.19) позволяет согласовать
механические характеристики привода
в двигательном и в тормозном режимах,
что показано на рис.6.16.
При необхо-димости торможе-ния привода уме-ньшается сигнал за-дания скорости ωзад. Ошибка по скорости меняет знак (ωзад-ω)<0, и на входе ЛПУ знак сигнала изменяется с (+) на (-), в соответствии с чем отключается контакт К(В) и вклю-чается контакт К(Н). Однако вклю-чение контакта К(Н) происходит не сразу, а с некоторой выдержкой времени, которая необходима, чтобы ток якоря уменьшился до нуля и тиристоры UZ(B) восстановили запирающие свойства. Спадание тока до нуля контролируется датчиком тока ДТ и нуль-органом НО (в других схемах для этой цели используются датчики проводимости вентилей ДПВ).
Когда ток спадет до нуля и по прошествии некоторой выдержки времени, включается ключ К(Н) и вступает в работу преобразователь UZ(H), уже подготовленный к работе в инверторном режиме. Привод переходит в режим рекуперативного торможения. Общее время переключения тиристорных групп составляет 5-10 миллисекунд, что является в большинстве случаев допустимым для обеспечения высокого качества управления.
При
работе в двигательном режиме в направлении
«назад» знак задания скорости отрицателен,
а абсолютное значение ошибки по скорости
![]() положительно, поэтому на вход ЛПУ
поступает отрицательный сигнал, и
включается ключ К(Н). Работает
преобразовательUZ(H)
в выпрямительном режиме. Логические
правила работы ЛПУ иллюстрируются
следующей таблицей.
положительно, поэтому на вход ЛПУ
поступает отрицательный сигнал, и
включается ключ К(Н). Работает
преобразовательUZ(H)
в выпрямительном режиме. Логические
правила работы ЛПУ иллюстрируются
следующей таблицей.
Таблица 6.3.
|
Знак ωзад |
Знак
|
Знак на входе ЛПУ |
Включен ключ |
Работает преобразователь |
Режим работы привода |
|
+ |
+ |
+ |
К(В) |
UZ(B) |
Двигательный |
|
+ |
- |
- |
К(Н) |
UZ(H) |
Тормозной |
|
- |
+ |
- |
К(Н) |
UZ(H) |
Двигательный |
|
- |
- |
+ |
К(В) |
UZ(B) |
Тормозной |
Находят применение также и другие схемы ЛПУ [1-6]. Механические характеристики реверсивного привода ТП-Д с раз-дельным управлением показаны на рис.6.16. При непрерывном токе якоря они описываются уравнением (6.18).
В режиме прерывистых токов в области малых значений момента линейность характеристик нарушается. В современных замкнутых по току и скорости системах регулирования, благодаря применению адаптивных регуляторов, удается линеаризовать механические характеристики и при малых значениях момента.