16.3. Системы асинхронного электропривода с частотно-токовым управлением
Асинхронные
электроприводы с диапазоном регулирования
скорости до D=100:1
и высокими требованиями к динамике,
когда осуществляются частые пуски,
торможения и реверсы, выполняются как
системы с частотно-токовым управлением.
В таких системах преобразователь частоты
работает в режиме источника тока. Это
достигается применением преобразователей
частоты типа ПЧТ или преобразователей
частоты типа ПЧН, которые охватываются
отрицательной обратной связью по току.
Системы регулирования осуществляет
задание частоты и величины тока статора
в соответствии с заданной скоростью и
нагрузкой на валу двигателя. Фазное
напряжение статора при питании от
источника тока является неконтролируемым
параметром. На рис.16.2 приведена схема
замещения и векторная диаграмма
асинхронного двигателя при питании от
источника тока. Из векторной диаграммы
следует, что при I1=const
с уменьшением скольжения и, следовательно,
момента на валу двигателя, ток
намагничивания Iμ
растет до значения равного I1.
Двигатель переходит в режим насыщения.
Во избежание этого ток статора I1
следует соответствующим образом
регулировать в зависимости от величины
тока
![]() ,
пропорционального моменту двигателя.
,
пропорционального моменту двигателя.


Рис.16.2. Схема замещения и векторная диаграмма при питании асинхронного двигателя от источника тока
При
питании асинхронного двигателя от
источника тока ток статора и потокосцепление
в зазоре
![]() в установившихся режимах работы связаны
следующим соотношением
в установившихся режимах работы связаны
следующим соотношением
 ,
(16.1)
,
(16.1)
где: Lm – индуктивность цепи намагничивания;
Lrl – индуктивность рассеяния обмотки ротора;
![]() -
абсолютное скольжение.
-
абсолютное скольжение.
Поэтому
в системах асинхронного электропривода
с частотно-токовым управлением необходимо
функционально связать ток статора с
величиной абсолютного скольжения в
соответствии с (16.1). Если при этом
механические характеристики двигателя
должны иметь постоянный критический
момент, то потокосцепление
![]() должно быть постоянным. Для этого случая
графическая зависимостьI1=f(sабс)
представлена на рис.16.3.
должно быть постоянным. Для этого случая
графическая зависимостьI1=f(sабс)
представлена на рис.16.3.
Ф ункциональная
схема асинх-ронного электропривода с
частотно-токовым управлением приведена
на рис.16.4. В этой схеме имеется
опти-мизированный контур регулирования
тока статораI1
и разомкнутый канал регулирования
скорости, в котором задается скорость
идеального холостого хода ω0,
соответствующая скорости вращения поля
статора при данной частоте. На входе
контура тока включен функциональный
преобразователь ФП, реализующий
зависимость I1з=f(sабс).
Сигнал абсолютного скольжения
ункциональная
схема асинх-ронного электропривода с
частотно-токовым управлением приведена
на рис.16.4. В этой схеме имеется
опти-мизированный контур регулирования
тока статораI1
и разомкнутый канал регулирования
скорости, в котором задается скорость
идеального холостого хода ω0,
соответствующая скорости вращения поля
статора при данной частоте. На входе
контура тока включен функциональный
преобразователь ФП, реализующий
зависимость I1з=f(sабс).
Сигнал абсолютного скольжения
![]() вычисляется в сумматоре на входе ФП как
вычисляется в сумматоре на входе ФП как![]() .
.
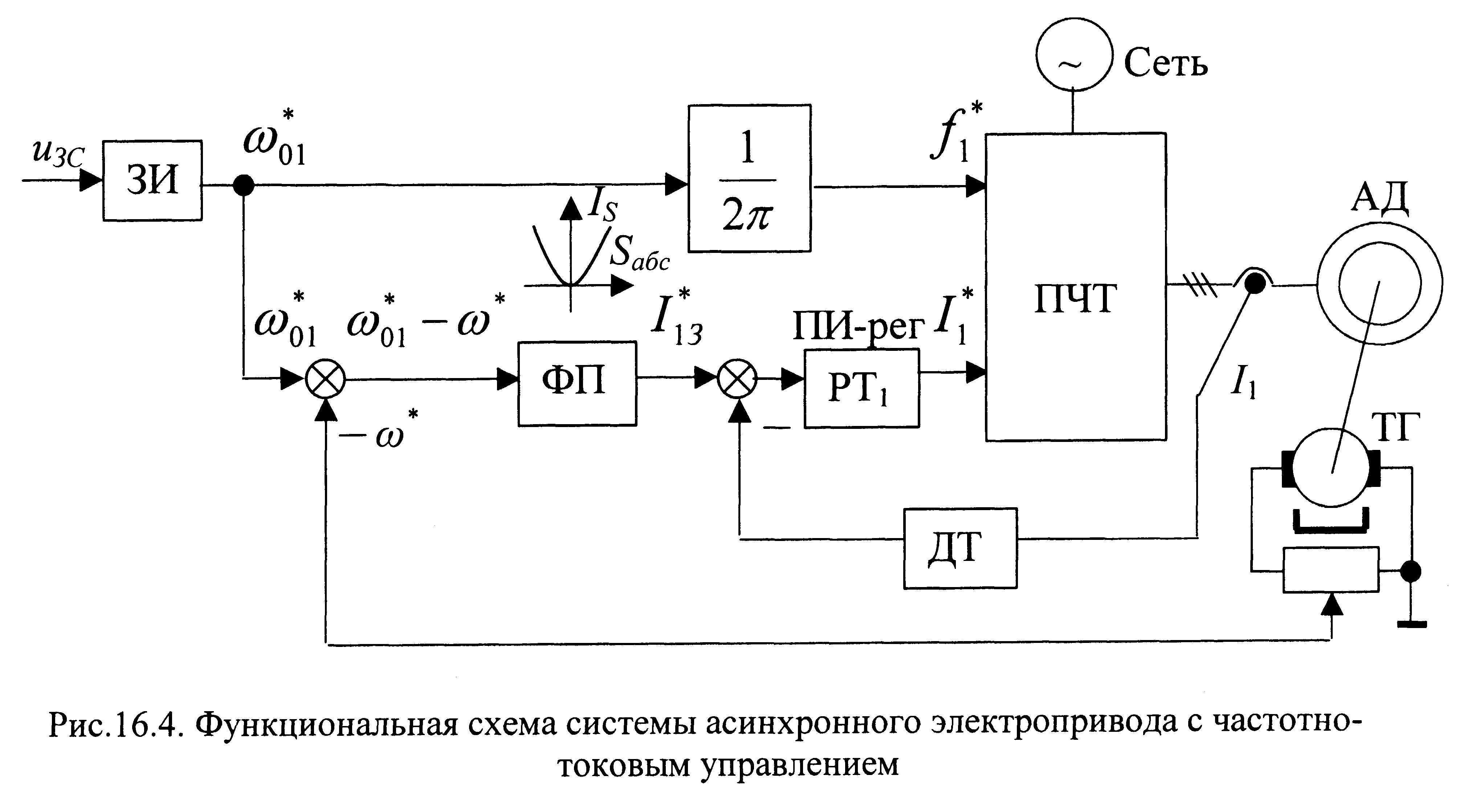
Жесткость механических характеристик в системе электропривода по схеме рис.16.4 близка к жесткости естественной механической характеристики асинхронного двигателя. Поэтому достижимый диапазон регулирования скорости в этой системе может составить примерно D=20:1.
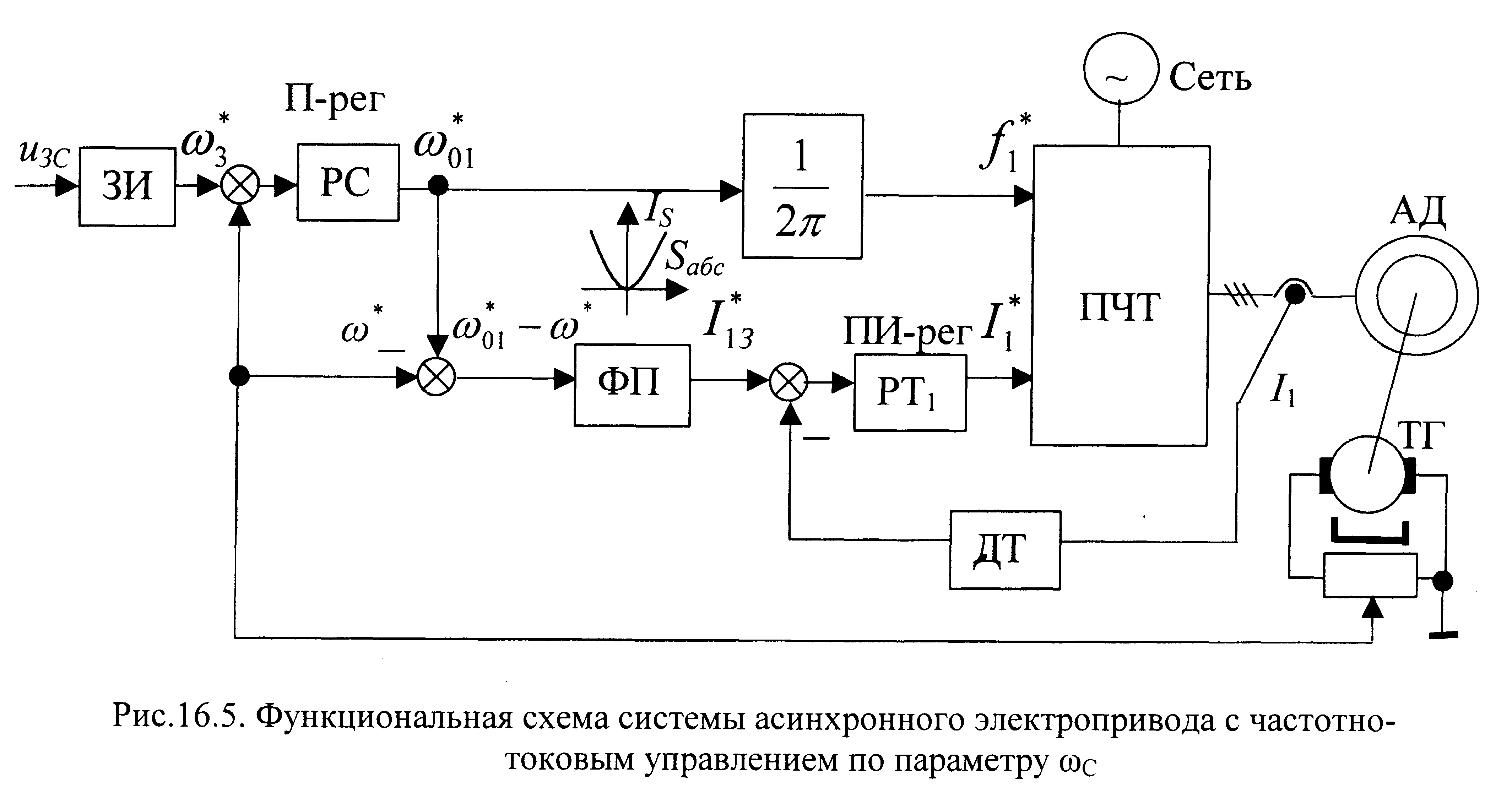
При
необходимости получения большого
диапазона регулирования следует внести
в систему замкнутый контур регулирования
скорости, как это показано на функциональной
схеме рис.16.5. Данная система управления
является двухканальной и содержит
контур скорости и контур тока, которые
настраиваются на модульный оптимум. На
выходе регулятора скорости формируется
сигнал, пропорциональный частоте питания
f1
и скорости вращения поля статора. Вычитая
из этого сигнала значение действительной
скорости
![]() ,
формируется сигнал, пропорциональный
абсолютному скольжению, который подается
на вход ФП. Функциональный преобразователь
в соответствии с зависимостью указанной
на рис.16.3 вырабатывает сигнал задания
тока статора, который подается на вход
контура тока, имеющего ПИ-регулятор.
Частотно-токовое управление может
применяться только для однодвигательных
электроприводов.
,
формируется сигнал, пропорциональный
абсолютному скольжению, который подается
на вход ФП. Функциональный преобразователь
в соответствии с зависимостью указанной
на рис.16.3 вырабатывает сигнал задания
тока статора, который подается на вход
контура тока, имеющего ПИ-регулятор.
Частотно-токовое управление может
применяться только для однодвигательных
электроприводов.