

Полученная желаемая дпф замкнутого контура тока (см. (17/67))
![]()
имеет входную
переменную – приращение угла отпирания
ТП
![]() ,
которое задает требуемое изменение
тока, а выходную переменную – приращение
за период проводимости Тп
тока
,
которое задает требуемое изменение
тока, а выходную переменную – приращение
за период проводимости Тп
тока
![]() или соответствующую ему величину сигнала
обратной связи по току, выраженную через
угол отпирания ТП -
или соответствующую ему величину сигнала
обратной связи по току, выраженную через
угол отпирания ТП -
![]() .
При пересчете приращения угла отпирания
ТП
.
При пересчете приращения угла отпирания
ТП
![]() в управляющее напряжение ТП Uу
учтем, что диапазон изменения угла от
300
до 1800
является квазилинейным. Примем этот
диапазон
в управляющее напряжение ТП Uу
учтем, что диапазон изменения угла от
300
до 1800
является квазилинейным. Примем этот
диапазон
![]() рад.
В этом диапазоне изменение угла управления
справедливы следующие соотношения.
рад.
В этом диапазоне изменение угла управления
справедливы следующие соотношения.

При Uу=8В,
![]() В.
В.
![]() .
.
В соответствии с (17.63)
![]() .
.
При
![]()
При
![]() ,
при этом
,
при этом
![]() В.
В.
Цена младшего разряда цифрового преобразования в контуре тока
![]() .
.
![]() .
.
Итак, ДПФ замкнутого контура тока принимает вид
![]() .
.
Здесь
![]() ,
так как Т
принято равным Тμ.
,
так как Т
принято равным Тμ.
ДПФ регулятора тока имеет вид (см.17.70)
![]() ,
,
где
![]()
 .
.
Рассмотрим теперь цифровой контур регулирования скорости, структурная схема которого приведена на рис.17.16.
Для контура скорости кС=0,051.
Величине α=0,867рад соответствует код 2047.
При Δα=0,186рад ΔUу=1,19В.

В §17.4 рассматривается два случая синтеза цифрового контура скорости: настройка контура скорости на модульный оптимум (МО); настройка контура скорости на оптимум, подобный симметричному с фильтром на входе (СО).
В первом случае при настройке на МО имеем ДПФ цифрового замкнутого контура скорости (17.78)
![]() ,
,
а ДПФ цифрового регулятора скорости (17.76)
![]() ,
,
где: dТ, d1 и d2 вычисляются по формуле (17.75) и имеют следующие значения

![]()
Для принятой настройки на МО с учетом найденных выше значений d1, d2, dТ.
![]() (см. формулу 17.77).
(см. формулу 17.77).
Полученной ДПФ цифрового регулятора скорости соответствует ДПФ цифрового замкнутого контура (17.78).
![]() .
.
Как указано в §17.4, в этом случае для реализации в цифровом контуре скорости МО имеем цифровой регулятор скорости, отличный от пропорционального, что усложняет программу регулятора для микропроцессора.
Для составления программы для ЦВМ (микропроцессора) составим рекуррентное уравнение для цифрового контура скорости
![]() .
.
ДПФ замкнутого контура скорости представим в стандартном виде
![]() ,
,
где:
![]()
При отработке
ступенчатого задающего воздействия
![]() получим операторное выражение для ω(z)
и области дискретных переменных z=ерТ
в виде
получим операторное выражение для ω(z)
и области дискретных переменных z=ерТ
в виде
![]() .
.
Для расчета переходного процесса использована методика, изложенная в [21-4].
Рекуррентное уравнение имеет вид
![]() .
(21.2)
.
(21.2)
Начальные условия
![]() .
(21.3)
.
(21.3)
На рис.21.3а представлен
рассчитанный по (21.2) и (21.3) переходный
процесс в цифровом контуре скорости.
Как видно из г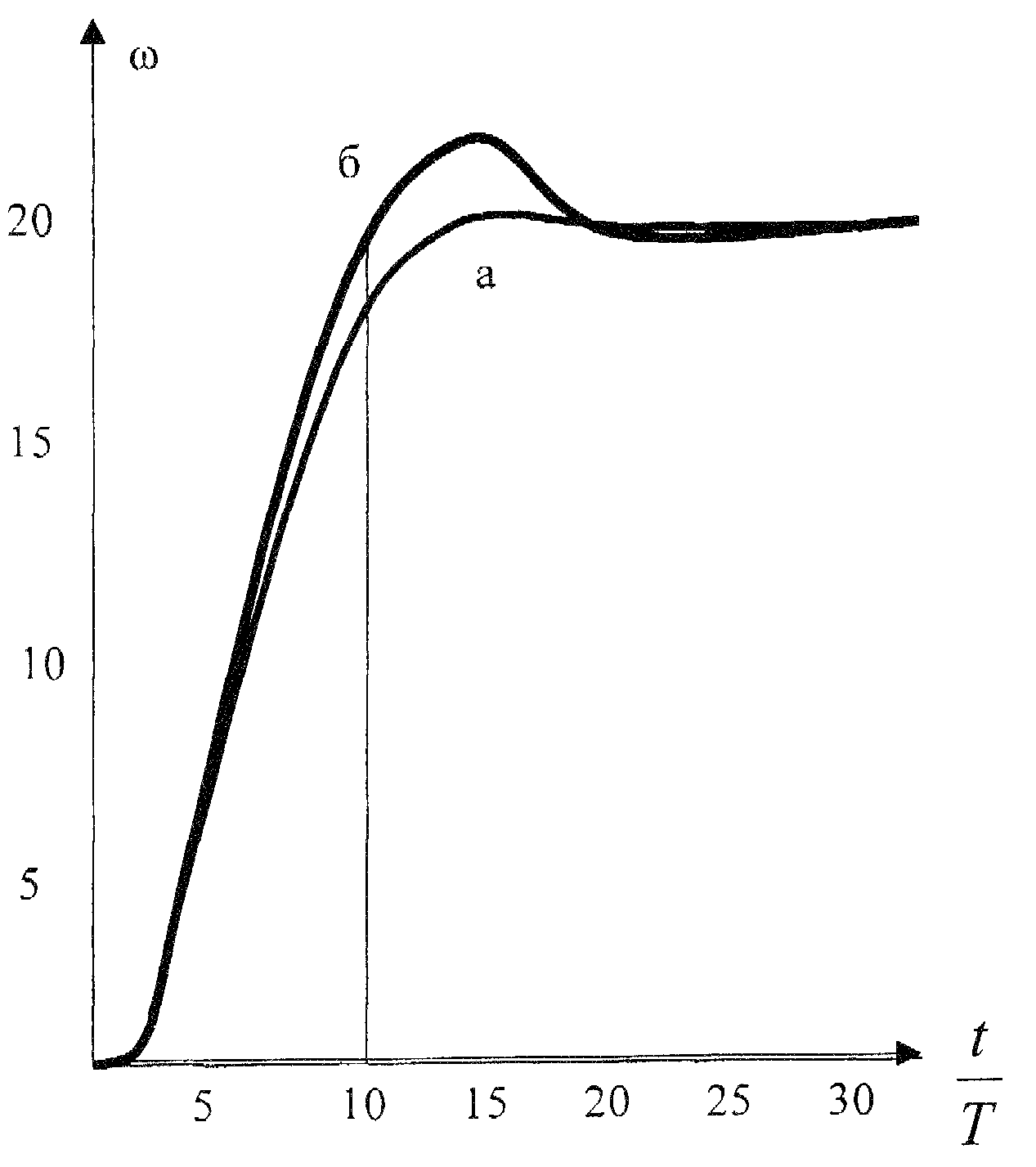 рафика,
время переходного процесса tПП
составляет ≈15Т,
а перерегулирование σ=6%.
рафика,
время переходного процесса tПП
составляет ≈15Т,
а перерегулирование σ=6%.
Как было сказано выше, реализации модульного опти-мума в цифровом контуре ско-рости предполагает использование цифрового регулятора ско-рости, отличного от пропор-ционального. Из выражения (17.76) очевидно, что для полу-чения пропорционального циф-рового регулятора скорости достаточно выполнить условия
Рис.21.3.
Переходные процессы в цифровом контуре
скорости при настройке на модульный
оптимум: а) ДПФ ЦРС
(17.29); б) ДПФ ЦРС (17.31)![]()
![]() .
.
Тогда
![]() (см.17.79).
(см.17.79).
ДПФ замкнутого цифрового контура в этом случае будет иметь вид
![]() .
.
В стандартном для реализации на ЦВМ виде последнее выражение представляется следующим образом
![]() ,
,
где: В=0,097; А1=1,606: А2=0,703.
На
рис.21.3б представлен переходный процесс
в цифровом контуре скорости для этого
случая. Время переходного процесса tПП
составило ≈21Т,
а перерегулирование
![]() 27%.
27%.
Из сопоставления кривых а и б на рис.21.3 ясно, что упрощение ДПФ цифрового регулятора скорости приводит к ухудшению переходного процесса контура.
Перейдем к рассмотрению второго случая синтеза цифрового контура скорости – настройка контура на оптимум, подобный симметричному. В этом случае согласно §17.4 ДПФ цифрового регулятора скорости имеет вид (17.83), а ДПФ замкнутого цифрового контура скорости – вид (17.84).

где:
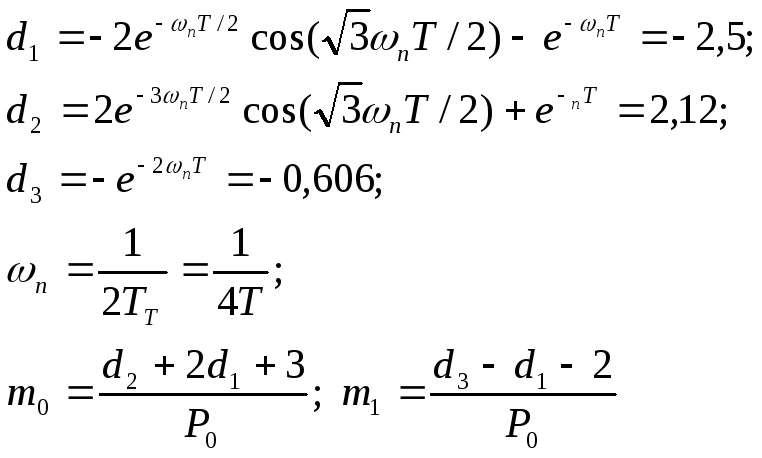
Подставляя найденные значения d1, d2, d3 в выражения для Wцрс(z) и Wзкс(z), получим следующие ДПФ цифрового регулятора скорости

Для составления программы для ЦВМ приведем рекуррентное уравнение для цифрового контура скорости, для чего Wцкс(z) представим в стандартном виде
![]() ,
,
где: А1=d1=-2,50; А2=d2=2,12; А3=-0,606; В1=0,12; В2=-0,106.
Рекуррентное уравнение в случае отработки ступенчатого воздействия запишется в виде
![]() (21.4)
(21.4)
с начальными условиями
![]() .
(21.5)
.
(21.5)
На рис.21.4а представлен
график переходного процесса в цифровом
контуре скорости, рассчитанные по (21.4)
и (21.5).
Как видно
из графика, переходный процесс имеет
колебательный характер, время переходного
процесса tПП
составило ≈41Т,
а перерегулирование
![]() 57%.
57%.
Как отмечается в
разделе 17.4, реализация цифрового
регулятора скорости с ДПФ (17.83) вызывает
определенные трудности. Если выполнить
условие
![]() ,
то в соответствии с этим
,
то в соответствии с этим
![]() ,
,
а ДПФ замкнутого цифрового контура скорости примет вид
![]() .
.
На рис.21.4б представлен
переходный процесс в замкнутом контуре
скорости в этом случае. Как видно из
графика характер переходного процесса
изменился. Время переходного процесса
tПП
составило
≈41Т,
а перерегулирование
![]() 10%.
10%.
И
Рис.21.4.
Переходные процессы в цифровом контуре
скорости при настройке на симметричный
оптимум: а) ДПФ ЦРС (17.35); б) ДПФ ЦРС
(17.37) з
сопоставления кри-вых а и в рис.21.4 видно,
что упрощение ДПФ цифрового регулятора
скорости и в этом случае приводит к
увеличению времени пере-ходного процесса
в контуре. При синтезе ЦРС необ-ходимо
провести модели-рование динамики контура
на персональном компью-тере и подобрать
приемлемые значения коэффици-ентов
ДПФ, а также пе-ресчитать величину
задания, чтобы не изменилось уста-новившееся
значение выходной величины.
з
сопоставления кри-вых а и в рис.21.4 видно,
что упрощение ДПФ цифрового регулятора
скорости и в этом случае приводит к
увеличению времени пере-ходного процесса
в контуре. При синтезе ЦРС необ-ходимо
провести модели-рование динамики контура
на персональном компью-тере и подобрать
приемлемые значения коэффици-ентов
ДПФ, а также пе-ресчитать величину
задания, чтобы не изменилось уста-новившееся
значение выходной величины.