

15.3 Синтез контура скорости, настроенного на мо
Если требуется, что система регулирования скорости имела диапазон регулирования скорости до D=50:1 и сравнительно невысокую точность, то целесообразно контур скорости настраивать на МО, так как в этом случае электропривод будет иметь хорошие динамические показатели качества.
В контуре скорости объектом регулирования является механическая часть электропривода, представляющая собой интергирующее звено с передаточной функцией
![]() .
(15.6)
.
(15.6)
Звеном с малой некомпенсируемой постоянной времени является контур тока, имеющий передаточную функцию второго порядка
![]() .
(15.7)
.
(15.7)
Р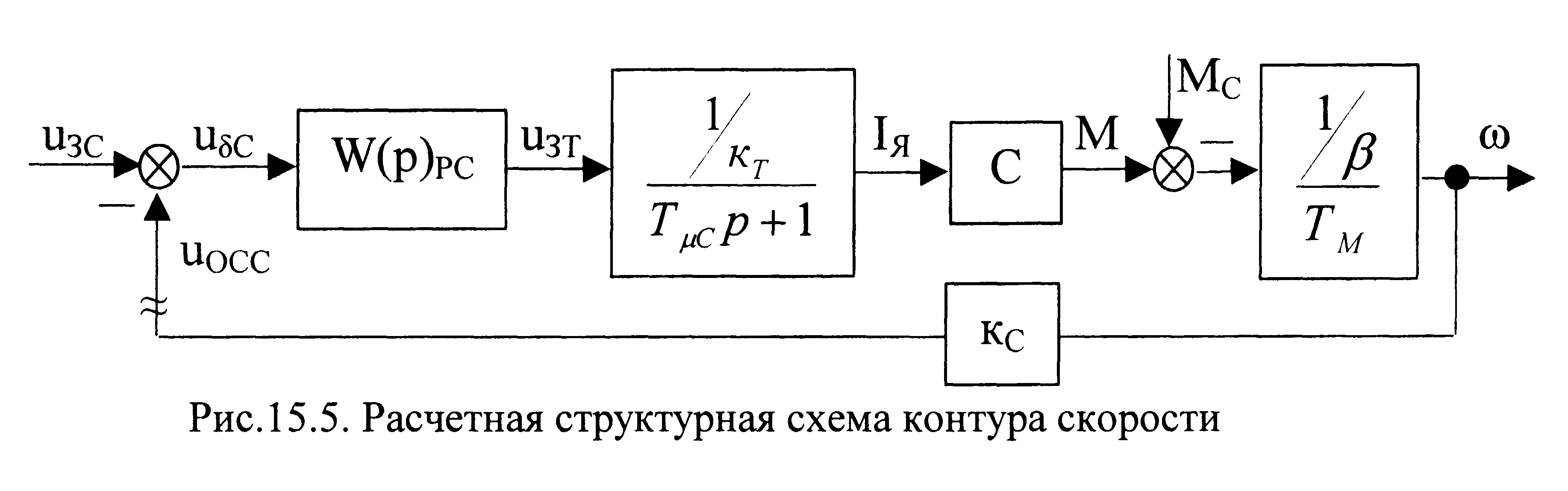 асчетная
структурная схема контура скорости
приведена на рис.15.5. Для упрощения
решения задачи синтеза контура скорости
следу-ет пони-зить поря-док пере-даточной
функции контура тока и счи-тать, что
контур тока имеет передаточную функцию
асчетная
структурная схема контура скорости
приведена на рис.15.5. Для упрощения
решения задачи синтеза контура скорости
следу-ет пони-зить поря-док пере-даточной
функции контура тока и счи-тать, что
контур тока имеет передаточную функцию
![]() ,
(15.8)
,
(15.8)
то есть ТС=амТТТ – некомпенсируемая постоянная времени контура скорости.
При этом полная передаточная функция контура тока и упрощенная эквивалентны по времени переходного процесса tпп.
Разомкнутый контур скорости, настроенный на МО, должен иметь передаточную функцию
![]() ,
,
где: амС=1:6 – коэффициент настройки на модульный оптимум контура скорости; амС=2 - стандартный коэффициент настройки на МО.
Передаточная функция регулятора скорости при настройке контура скорости на МО находится, если приравнять W(р)ркс =W(р)ркс мо.
![]() .
.
Следовательно, регулятор скорости должен иметь передаточную функцию
![]() .
(15.9)
.
(15.9)
Таким образом, для настройки контура скорости на МО следует применять П-регулятор с коэффициентом усиления Крс (15.9).
Передаточные функции контура скорости по задающему воздействию при настройке на МО имеют следующие выражения
![]() ,
(15.10)
,
(15.10)
г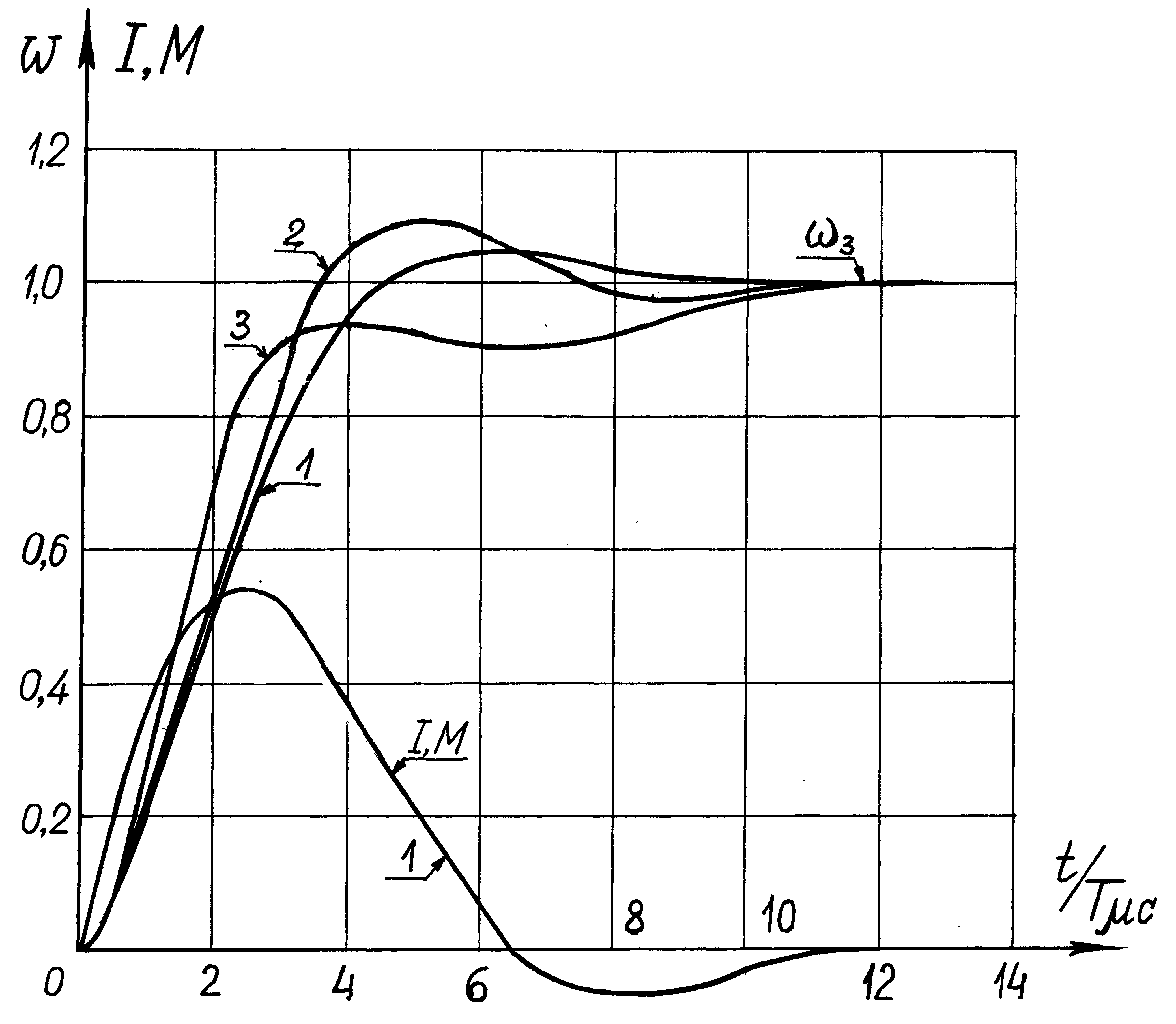 де:
де:
![]() – характеристический полином второй
степени передаточной функции контура
скорости, настроенного на МО,
– характеристический полином второй
степени передаточной функции контура
скорости, настроенного на МО,
![]() (15.11)
(15.11)
![]() .(15.12)
.(15.12)
Передаточные функции (15.11), (15.12) отличаются только масштабными коэффициентами.
У
Рис.15.6.
Переходные процессы, отработки
ступенчатого задания uЗС
при настройке контура скорости на МО 1
– малое некомпенсируемое апериодическое
звено; 2
– малое некомпенсируемое высокочастотное
колебательное звено 3
– с учетом э.д.с.двигателя
При ступенчатом
сигнале uзс-![]() ,
Iуст=0,
Муст=0.
,
Iуст=0,
Муст=0.
Графики переходных процессов отработки ступенчатого задания скорости приведены на рис.15.6.
Передаточная функция скорости по ошибке при отработке сигнала задания имеет вид
![]() .
(15.13)
.
(15.13)
Числитель
передаточной функции по ошибке
![]() содержит сомножителем операторр
в первой степени. Следовательно, контур
скорости имеет астатизм первого порядка
относительно сигнала задания скорости.
Установившийся сигнал ошибки регулирования
скорости при р0
находится
из соотношения
содержит сомножителем операторр
в первой степени. Следовательно, контур
скорости имеет астатизм первого порядка
относительно сигнала задания скорости.
Установившийся сигнал ошибки регулирования
скорости при р0
находится
из соотношения
![]() .
(15.14)
.
(15.14)
При отработке ступенчатого сигнала задания скорости установившаяся ошибка uуст=0. Следовательно, в установившемся режиме при отработке ступенчатого сигнала задания скорости uзC(р)=uзC. Поэтому коэффициент обратной связи по скорости рассчитывается из соотношения
![]() .
(15.15)
.
(15.15)
где: uзCмакс=8В – для серийных операционных усилителей с учетом возможных перерегулирований.
Передаточные функции контура скорости, по возмущению от момента сопротивления при настройке на МО имеют следующие выражения
![]() ,
(15.16)
,
(15.16)
![]() ,
(15.17)
,
(15.17)
![]() .
(15.18)
.
(15.18)
Передаточные
функции (15.17), (15.18) отличаются только
масштабом и подобны передаточным
функциям по задающему воздействию
![]() .
.
Из передаточной функции (15.16) следует, что контур скорости при настройке но МО имеет астатизм нулевого порядка по входу Мс, и установившееся отклонение скорости от ступенчатого воздействия момента сопротивления при р0 равно
![]() .
(15.19)
.
(15.19)
Соответственно модуль жесткости механической характеристики при настройке контура скорости на МО определяется соотношением
![]() .
.
Уравнение механической характеристики системы регулировани скорости при настройке контура скорости на МО
![]() .
(15.20)
.
(15.20)
Статизм по моменту сопротивления при настройке системы регулирования скорости на МО вычисляется из соотношения
![]() ,
,
где:
![]() – заданная скорость электропривода.
– заданная скорость электропривода.
С амый
большой статизм система имеет на нижней
характеристике диапазона ре-гулирования.
Величину этого статизма обычно указывают
в технических данных системы электропривода.
Поэтому с точки зрения возможного
диапазона регулирования ско-рости
система с настройкой на МО имеет
сравнительно низкие показатели и
соотве-тственно ограниченное при-менение.
амый
большой статизм система имеет на нижней
характеристике диапазона ре-гулирования.
Величину этого статизма обычно указывают
в технических данных системы электропривода.
Поэтому с точки зрения возможного
диапазона регулирования ско-рости
система с настройкой на МО имеет
сравнительно низкие показатели и
соотве-тственно ограниченное при-менение.
Н
Рис.15.7.
Переходные процессы компенсации
возмущения на МС
при настройке контура скорости на МО![]() ,
то есть контур тока взят без упрощений,
когда
,
то есть контур тока взят без упрощений,
когда
 .
.
Из этих графиков видно, что в реальной системе перерегулирование и время переходного процесса увеличиваются по сравнению с упрощенным вариантом. Если к тому же в расчетах учесть влияние внутренней обратной связи по э.д.с. в электродвигателе, то переходные процессы будут еще больше отличатся от идеальных, как показано на рис.15.6.