

2.4.3. Мостовые измерительные схемы с логометрами
Измерительную цепь с мостовой схемой и логометром представлена на рисунке(рис.2.6).
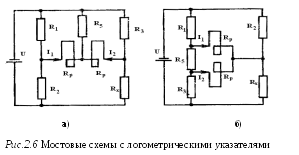
где: R1, R2, R3, RX — сопротивления плеч моста, причем последнее плечо — измерительное; RP — сопротивление рамок логометра, R5—сопротивление полудиагонали.
Отклонение подвижной системы логометра является функцией отношения сила токов в рамках, т.е.
![]() .
.
Но отношение сил токов зависит от параметров схемы
![]()
или, если положить R1=R3,
![]() .
.
По формуле при заданных значениях сопротивлений моста можно найти отношения сил токов в рамках логометра, а следовательно, и угол отклонения подвижной системы.
В приборах с логометрическими указателями сопротивление полудиагонали R5 обычно выбирают из условий компенсации температурных погрешностей, вызванных влиянием температуры T окружающей среды на рамки логометра. Сопротивление R5 в этом случае выполняется из двух частей: R5=R5’+RT первое из которых с нулевым температурным коэффициентом, а второе — с положительным температурным коэффициентом, например, медное.
Выберем величину сопротивления RT из условия независимости отношения токов от температуры T окружающей среды.
Положим, что
![]() ,
,
где α −температурный коэффициент сопротивлений.
Подставляя значения RP и RT и считая, что остальные сопротивления не зависят от температуры окружающей среды, получим
![]() ,
,
где
![]()
Если параметры моста выбрать из условия
![]() ,
,
то отношение токов не будет зависеть от температуры T окружающей среды. В самом деле, исключая, например, B1 из формулы получим
![]() .
.
Подставляя значения A1, A2, B1, B2, найдем
 .
.
Отсюда следует, что полная температурная компенсация, возможна только тогда, когда сумма сопротивлений R2+RX постоянна, т. е. когда сопротивления R2и RX изменяются взаимно.
В схеме двойного моста (рис.2.6.а,) рамки логометра с одной стороны соединяются вместе, а с другой — через сопротивление R5.
Если условно считать, что одна из рамок отсутствует, то для второй рамки при условиях R1=R3 и R2=RX мост оказывается разбалансированным (вследствие того, что R50) в одну сторону, а для первой рамки при отсутствии второй ‒ в другую сторону. Это обстоятельство позволяет повысить чувствительность измерительной схемы.
Полученные здесь зависимости для мостов постоянного тока целиком справедливы для мостов переменного тока, состоящих из чисто активных сопротивлений. Эти зависимости справедливы также в общем случае, если в полученных выражениях активные сопротивления заменить полными сопротивлениями.
2.4.4. Измерительные схемы статического уравновешивания
Измерительные цепи со статическим уравновешиванием выполняются в виде компенсационных схем с обратной связью (рис.2.7).
Измеряемая величина х преобразуется с помощью первичного преобразователя ПП в величину FX, уравновешиваемую величиной FY, получаемой от обратного преобразователя ОП. Входной величиной обратного преобразователя является выходная величина I, формируемая в прямой цепи, состоящей из преобразователя неравновесия ПН, модулятора М, усилителя Ус и демодулятора ДМ. На вход преобразователя ПН поступает сигнал рассогласования F=FX-FY.
Измерительная
цепь статического уравновешивания
состоит из прямой цепи с преобразованием
![]() FI
и коэффициентом преобразования (передачи)
К
и цепи обратной связи с преобразованием
IF
и коэффициентом преобразования
(передачи) .
FI
и коэффициентом преобразования (передачи)
К
и цепи обратной связи с преобразованием
IF
и коэффициентом преобразования
(передачи) .
Важной особенностью цепей уравновешивания является обратный преобразователь, который выполняет функцию преобразования выходной величины I в сигнал FY, однородный с сигналом FX (напряжение – напряжение, сила тока –сила тока, сила – сила, момент–момент).
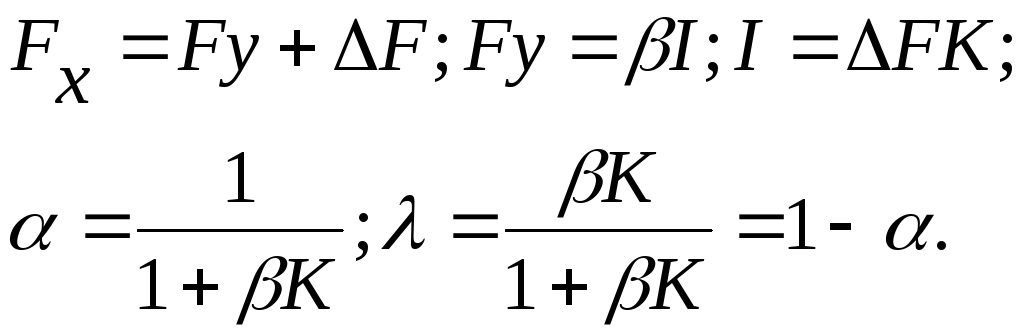
Из схемы (рис.2.8) видно, что К=I/F; =FY/I; FY/F=K – глубина уравновешивания; F/FX= – относительное неравновесие; FY/FX=λ – относительная глубина уравновешивания.
Пользуясь этими обозначениями, можем написать
Чувствительность измерительной цепи уравновешивания
![]() .
.
Отсюда следует, что чувствительность цепи уравновешивания, в 1 + K раз меньше чувствительности K прямой цепи. Уменьшение чувствительности окупается тем, что в такое же число раз уменьшается погрешность преобразования FXI.
Погрешность измерительной цепи складывается из мультипликативной составляющей S, обусловленной изменением чувствительности S, и аддитивной составляющей a, возникающей в цепях K и . Для получения мультипликативной погрешности найдем связь между приращениями чувствительностей S, K и , воспользовавшись выражением:
![]() ,
,
тогда:
![]() ,
,
или, наконец,
![]() ,
,
где
![]() .
.
Аддитивная погрешность (рассматриваем случайную составляющую) цепей К и , обусловленная шумами, дрейфом, наводками и нестабильностью и приведенная по входу измерительной цепи, будет равна
![]() ,
,
где K и −абсолютные погрешности цепей K и .
Результирующая погрешность равна сумме аддитивной и мультипликативной погрешностей
![]() .
.
Рассматриваем только случайные погрешности. Обычно составляющие K, , K и некоррелированы между собой, поэтому
 ,
,
или, так как =F/F, то
 .
.
Отсюда следует, что при повышении глубины уравновешивания K величины и λ будут соответственно α0 и λ 1, поэтому погрешности K, K и измерительной цепи уравновешивания уменьшаются в =1/(1+K) раз, тогда как мультипликативная погрешность цепи обратной связи (обратного преобразователя) остается неизменной. Для повышения точности измерительной цепи необходимо уменьшать , т. е. выбирать ОП с высокостабильными параметрами. Заметим, что уменьшение погрешностей K, и K за счет обратного преобразователя в =1/(1+K) раз приводит к такому же уменьшению чувствительности S измерительной цепи статического уравновешивания.
При статическом уравновешивании для поддержания определенного значения выходной величины I необходимо на вход цепи К подавать сигнал рассогласования F=FX-FY. Поскольку F=FX и =1/(1+K), то величина F составляет постоянную часть от Fх и может быть учтена при градуировке. Приборы, содержащие измерительные цепи статического уравновешивания, имеют широкий диапазон измерения, достигающий D=106. Приборы этого типа имеют достаточное быстродействие. Однако их погрешности вследствие того, что указатель не охвачен обратной связью, не всегда малы. При большой глубине обратной связи в приборе возможно нарушение устойчивости.
Для оценки динамических характеристик измерительных цепей статического уравновешивания следует рассматривать передаточную функцию
![]() ,
,
где k1(p) и k2(p) —коэффициенты передачи первичного преобразования и указателя.