

физ / обербек 3.1-3
.5.pdf
|
|
|
8 |
|
|
|
|
|
|
Iω |
2 |
|
mV 2 |
|
|||
|
mgh − |
|
|
+ |
|
|
|
|
|
|
|
|
|
||||
E = |
|
2 |
|
|
2 |
100% |
(8) |
|
|
mgh |
|
||||||
|
|
|
|
|
|
|||
Это упражнение можно рассматривать как дополнение к одному из первых трех. По данным одного из этих упражнений составляют таблицу 4.
Таблица 4
m |
h |
t |
R |
a |
V |
ω |
I |
E |
Здесь V и ω рассчитывают по формулам (6) и (7).
Контрольные вопросы
1.Напишите основной закон динамики вращательного движения.
2.Сформулируйте и запишите, что такое момент силы, момент инерции, угловая скорость и угловое ускорение, момент импульса материальной точки и тела.
3.Меняется ли натяжение нити в зависимости от R ?
4.Является ли график ε (I) прямой линией ? Почему ?
5.Какая система называется консервативной ? Диссипативной ?
9
ЛАБОРАТОРНАЯ РАБОТА N0 3-2
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛА ДИНАМИЧЕСКИМ МЕТОДОМ
Цель работы: экспериментальная проверка основного закона вращательного движения.
Приборы и принадлежности: маховое колесо в подшипниках, на оси которого находится шкив, секундомер, набор грузов, штангенциркуль, линейка.
Описание установки
R
 T
T
 mg
mg
Рис. 1
В данной работе определяется момент инерции системы, состоящей из вала, на котором укреплены маховое колесо и шкив (рис. 1).
Метод определения момента инерции такой системы аналогичен методу определения момента инерции маятника Обербека. Для исключения систематической ошибки, необходимо учесть влияние сил сопротивления (силы трения в подшипниках, силы сопротивления, возникающие при падении груза в воздухе). Момент сил сопротивления будем считать независящим от скорости и веса груза, вызывающего вращение системы, тогда основное уравнение динамики вращательного движения системы запишется в виде
M − Mтр = I ε,
где M - момент сил натяжения нити, Mтр - момент сил трения, ε - угловое ускорение, I - момент инерции системы.
Для исключения из расчета момента сил сопротивления, который считаем постоянным, проводят опыт дважды, беря два различных груза, приводящих систему во вращение.
Тогда для первого груза |
M1 − Mтр |
= I ε1 |
для второго |
M2 − Mтр |
= I ε2 |

10
Вычитая из одного равенства другое и определяя момент инерции I получим
I = |
M 2 |
− M 1 |
(1) |
|
|
|
ε2 |
−ε1 |
|
|
|
||
|
|
|
|
|
||
Моменты сил M1 и M2 определяем по формулам |
||||||
|
|
|
|
|
a |
|
|
|
M =T R = m(g − a)R = mg 1 |
− |
|
R (2) |
|
|
|
|
||||
|
|
|
|
|
g |
|
где T - натяжение нити, R - радиус шкива, m - масса груза, a - ускорение груза. Движение груза будет равноускоренным без начальной скорости. Ускорение груза подсчитываем по формуле
2h
a = t2 (3)
где h - пусть пройденный грузом за промежуток времени t. С таким же ускорением движутся точки на поверхности шкива. Угловое ускорение шкива ε связано с линейным ускорением точек на поверхности шкива соотношением
a2h
ε= R = R t 2 (4)
Измеряя на опыте h и t, для каждого груза m1 и m2 по формулам (1) - (4), определяют момент инерции системы. Ускорение силы тяжести g задано.
Порядок выполнения работы и обработка результатов измерения.
1. Подготавливают протокол и таблицу для записи результатов измере-
ний.
2.Измеряют штангенциркулем диаметр шкива 2R. Точность измерения
0,1 мм.
3.На технических весах измеряют массы грузов m1 и m2. Точность измерения 0,5 г. Эти величины могут быть заданы.
4.На шкив наматывается нить, на которой укреплен груз m, так чтобы он находился на высоте h над уровнем пола. Масштабной линейкой измеряется h с
точностью h.
5.Предоставив грузу m возможность падать, по секундомеру замеряют время падения. Секундомер включают в момент падения груза и выключают одновременно с ударом груза о пол.
6.По формулам (3), (4), (2) вычисляют линейное, угловое ускорение, вращающий момент.
Результаты измерений и вычислении заносят в таблицу.
7.Вычисляют относительные и абсолютные погрешности для a, ε, M.
8.По формуле (1) вычисляют среднее значение момента инерции Iср.
11
Вычисляют относительную и абсолютную погрешности ( I) для момента инерции.
9. Результат определения момента инерции представляют в виде
I = Iср ± |
I |
|
|
|
r, его толщину и, зная плотность |
|||||
10. Измеряют радиус махового колеса |
||||||||||
материала колеса, подсчитывают его массу M. |
|
|
|
|||||||
Таблица |
|
|
|
|
|
|
|
|
|
|
N опыта |
|
m |
R |
t |
t |
|
a |
ε |
M |
|
|
|
|
|
|||||||
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
m1 |
|
|
|
|
|
|
|
|
Среднее |
|
|
|
|
|
|
|
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
|
m2 |
|
|
|
|
|
|
|
|
Среднее |
|
|
|
|
|
|
|
|
|
|
значение |
|
|
|
|
|
|
|
|
|
|
11. Принимая маховик за сплошной диск, подсчитывают его момент
инерции по формуле |
I |
= |
1 |
M r2 , |
2 |
12. Сравнивают теоретическое и опытное значение момента инерции с помощью интервала значений [I − I , I + I] .
Контрольные вопросы
1.Дать определение момента инерции, момента силы.
2.Записать основное уравнение динамики вращательного движения.
3.Вывести расчетную формулу для определения момента инерции в этой
работе.
12
ЛАБОРАТОРНАЯ РАБОТА N0 3-3
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВОГО КОЛЕСА И СИЛЫ ТРЕНИЯ В ОПОРЕ
Цель работы: изучение основных законов динамики вращательного движения.
Приборы и принадлежности: маховое колесо, укрепленное на стене, масштабная линейка, штангенциркуль, секундомер, шнур с набором грузов.
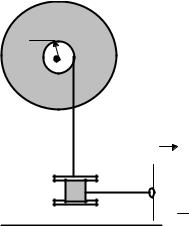
Р
Описание установки
Установка состоит из махового колеса А, насаженного на вал В. Вал установлен на шарикоподшипниках С1 и С2 (рис. 1). Маховое колесо приводится во вращение грузом массой m, укрепленным на нити, намотанной на вал. Груз m на какой-то высоте h1 обладает потенциальной энергией mgh1. Если предоставить возможность грузу m падать, то его потенциальная энергия перейдет в
кинетическую энергию поступательного движения груза |
mV 2 |
, кинетическую |
|
2 |
|||
I ω 2 |
|
||
|
|
энергию вала с маховым колесом 2 и часть ее уйдет на работу сил трения
A = F h1 по преодолению силы трения F в опоре. Тогда согласно закону сохранения энергии
|
|
|
|
|
|
|
13 |
mgh |
= |
mV 2 |
+ |
Iω |
2 |
+ Fh |
(1)Двигаясь равноускоренно с ускорением |
|
|
|
|||||
1 |
2 |
|
2 |
1 |
|||
|
|
|
|
|
|
||
a, груз в самой нижней точке траектории приобретает линейную скорость V:
a = |
2h1 |
(2) |
V = at = |
2h1 |
|
(3) |
|||||
t |
|||||||||||
2 |
|
||||||||||
|
|
t |
|
|
|
|
|
||||
где t - время опускания с высоты h1. |
|
|
|
|
|||||||
Угловую скорость ω махового колеса найдем по формуле |
|
||||||||||
ω = |
V |
|
= |
2h1 |
(4), |
|
|
|
|
||
r |
|
|
|
|
|
||||||
|
|
|
tr |
|
|
|
|
||||
где r - радиус вала В.
Сила трения F находится так: после опускания груза m с высоты h1 колесо, вращаясь по инерции поднимает груз на высоту h2 < h1, где mgh2 - потенциальная энергия груза. Уменьшение потенциальной энергии груза равно работе по преодолению силы трения в опорах С1 и С2, т.е.
|
mgh1 − mgh2 |
= F (h1 + h2) |
|
|
|||||||||||||||||
|
ОткудаF = mg |
h1 −h2 |
(5) |
|
|
||||||||||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
h +h |
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
Подставив формулу (1) значения a, V, ω и |
F из формул (2), (3), (4) и (5), |
|||||||||||||||||||
получаем выражение для момента инерции I: |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
h2 |
|
|
|
|
|
|
|
||
|
I |
= mr2 |
gt 2 |
|
|
|
|
|
|
|
|
−1 |
|
||||||||
|
h1 (h1 + h2 ) |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
и g ≈ 10 м/с2, поэтому |
||||||||||
|
В |
работе |
h1 |
|
|
h2 |
0,5 |
м, t 10 c |
|||||||||||||
gt 2 |
|
h2 |
|
|
|
|
>>1 и расчетная формула для I может быть записана в виде |
||||||||||||||
h1 (h1 + h2 ) |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
2 |
|
gt2 |
|
|
|
h |
|
|
|
|
|
|
|
|||||
|
I = mr |
|
|
|
|
|
|
|
|
2 |
|
(6) |
|
|
|
||||||
|
|
|
|
|
h |
|
|
h + h |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
1 |
2 |
|
|
|
|
|
|
|
|||
Порядок выполнения и обработка результатов измерения.
1.Подготовить протокол выполнения лабораторной работы и таблицу для записи результатов измерений.
2.Измерить штангенциркулем радиус вала r. Точность измерения
0,1 мм.
3.Намотать на вал нить, поднять груз до высоты h1.
4.Отпустив груз, включают секундомер и измеряют время t падения груза
m с высоты h1.
5. Определяют высоту h2, на которую поднимается груз m после опускания с точностью h.
14
6. Вычисляют силу трения в опоре и момент инерции махового колеса по формулам (5) и (6).
Опыты проводят для двух разных грузов m1 и m2. Результаты измерений заносят в таблицу.
15
Таблица
N
опыта |
m |
r |
h1 |
h2 |
h2 |
t |
t |
F |
I |
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
m1 |
|
|
|
|
|
|
|
|
|
Сред |
|
|
|
|
|
|
|
|
|
|
нее |
|
|
|
|
|
|
|
|
|
|
зна- |
|
|
|
|
|
|
|
|
|
|
чение |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
3 |
m2 |
|
|
|
|
|
|
|
|
|
Сред |
|
|
|
|
|
|
|
|
|
|
нее |
|
|
|
|
|
|
|
|
|
|
зна- |
|
|
|
|
|
|
|
|
|
|
чение |
|
|
|
|
|
|
|
|
|
|
7. Вычислить относительные и абсолютные погрешности для F и I (при |
||||||||||
этом h1 = |
h2 ) . |
|
|
|
|
|
|
|
|
|
8. Найти средние значения Fср и Iср по результатам опытов с m1 и m2. 9. Рассчитать момент инерции вала с маховым колесом, приняв их за ци-
линдры |
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
I* = I |
|
+ I |
|
= |
m |
|
r2 + |
m |
|
R 2 |
|||
B |
A |
2 |
B |
2 |
A |
||||||||
|
|
|
|
|
|
|
 А
А
В
где mA, mB,B R, r - массы и радиусы вала и колеса, соответственно. R и r измеряют штангенциркулем, массы находят расчетным путем: mA = πR2 h ρA, mBB = π r2 l ρB,B где h - толщина колеса, l - длина вала (их измеряют) ρА, ρВ - плотности материала колеса и вала (они задаются).
10. Сравнить теоретическое (расчетное) значение I* с опытным Iср, учитывая погрешность опыта Iср.
Контрольные вопросы
1. Сформулировать и записать основное уравнение динамики для вращательного движения.
16
2. Сформулируйте физический смысл момента инерции.
Вывести расчетную формулу для момента инерции в данной работе.

17
ЛАБОРАТОРНАЯ РАБОТА N0 3-4
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТЕЛ И ПРОВЕРКА ТЕОРЕМЫ ШТЕЙНЕРА МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
Цель работы: ознакомление с измерением момента инерции тела методом крутильных колебаний и экспериментальная проверка теоремы Штейнера.
Приборы и принадлежности: трифилярный подвес, секундомер, штангенциркуль, набор цилиндрических грузов.
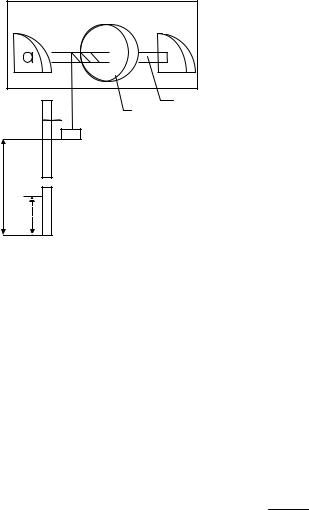
Описание установки
Рис. 1 Трифилярный подвес представляет собой круглую платформу (диск),
подвешенную на трех симметрично расположенных нитях, укрепленных у краев платформы. Наверху нити прикреплены к диску меньшего радиуса (рис. 1). Платформа может совершать крутильные колебания вокруг вертикальной оси, перпендикулярной ее плоскости и проходящей через ее центр. Период колебаний платформы зависит от ее момента инерции. Если платформу нагрузить ка- ким-либо телом, то период изменится. Это свойство и используется в данной работе. При повороте платформы массы M на некоторый угол ϕ она приподнимается на высоту h и приобретает запас потенциальной энергии
Eп = M g h
При возвращении платформы в положение равновесия она совершает вращательное движение, обладая в положении равновесия кинетической энергией